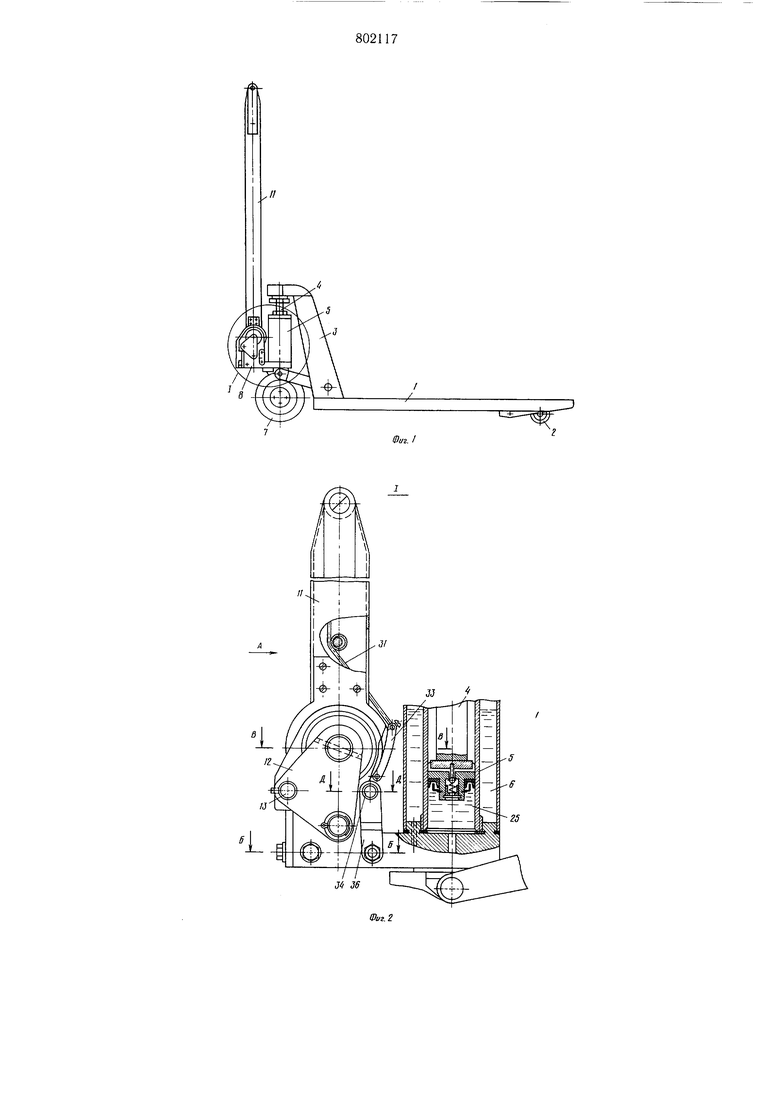
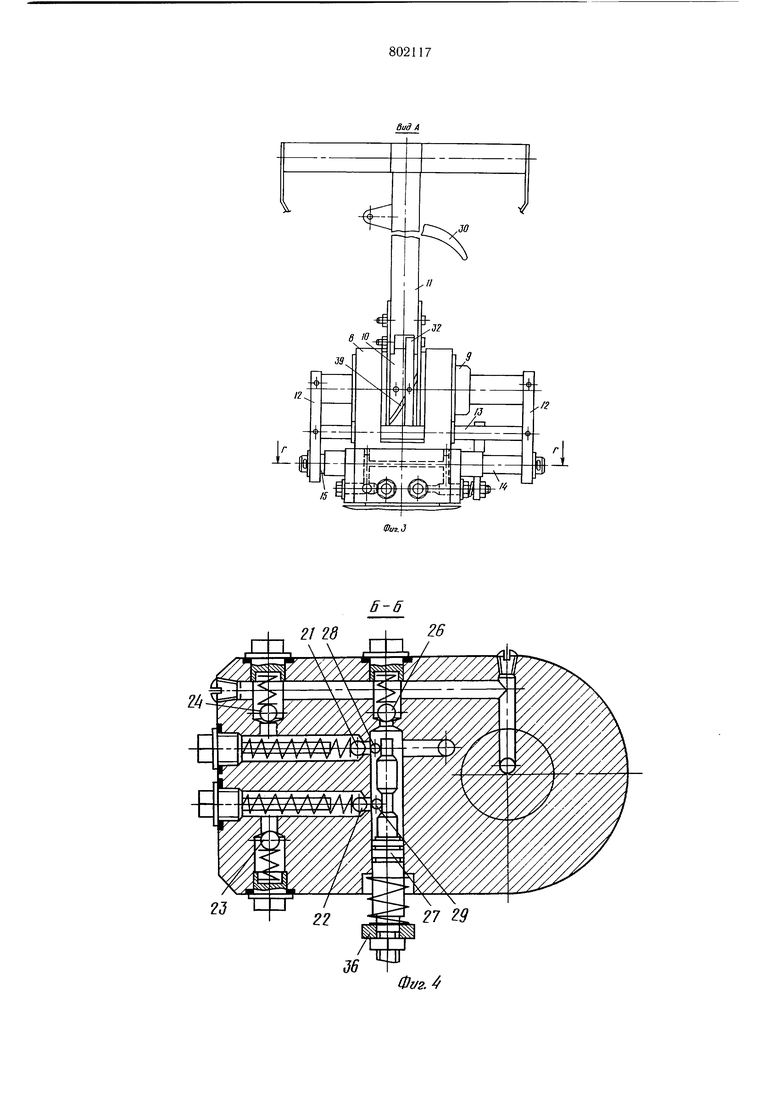
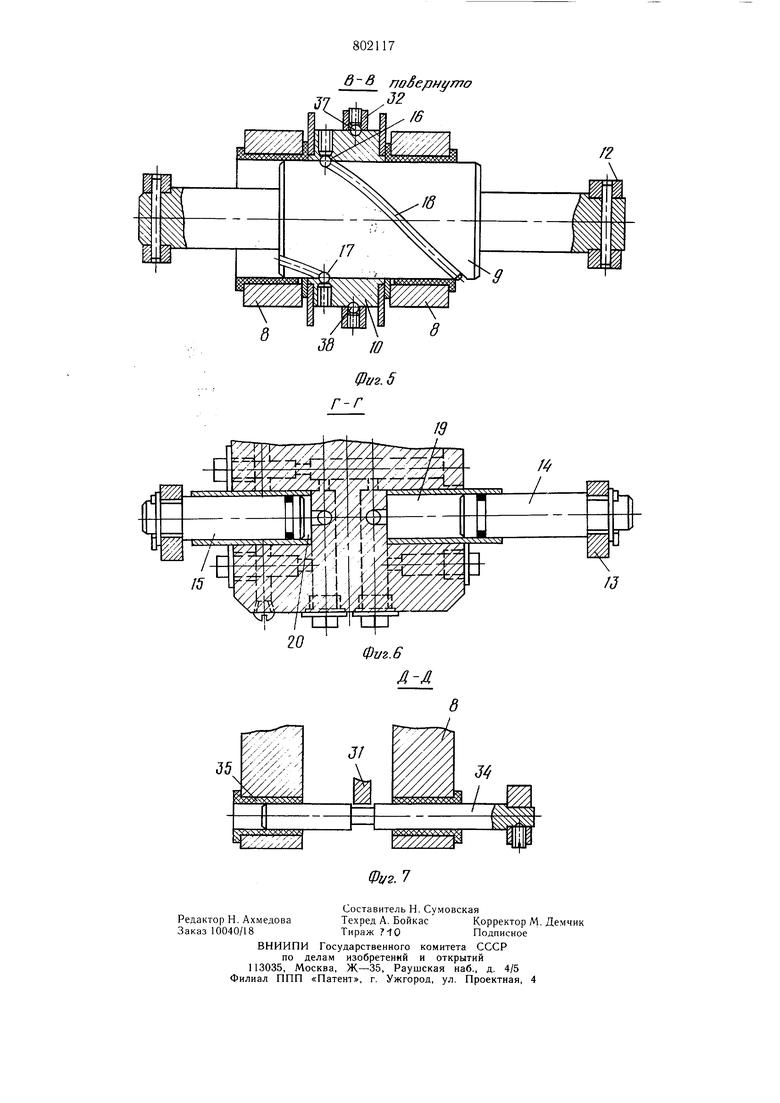
(54) РУЧНАЯ ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА ключающее золотниковое устройство выполнено в виде закрепленной на рукоятке управления поворотной в вертикальной плоскости скобы, новоротной относительно обоймы шайбы, которая связана посредством серьги и тросика с указанной скобой, и кинематически связанной с шайбой дополнительной оси, пропушенной в дополнительное отверстие, выполненное в корпусе, при этом на одном конце дополнительной оси закреплена планка, связанная с золотником, на наружной цилиндрической поверхности обоймы выполнены винтовые канавки, а на внутренней цилиндрической поверхности шайбы выполнены впадины, в которых размещены шарики для взаимодействия с указанными канавками. На фиг. 1 изображен общий вид тележки; на фиг. 2 - узел I фиг. 1 в разрезе; на фиг. 3 - вид А фиг. 2; на фиг. 4 - разрез Б-Б фиг. 2; на фиг. 5 - разрез В - В фиг. 2; на фиг. 6 - разрез Г-Г фиг. 3; на фиг. 7 - разрез Д-Д фиг. 2. Грузовые виды 1 ручной тележки установлены на выдвижных роликах 2 и соединены через несуш.ий кронштейн 3 с верхним концом штока 4 гидроцилиндра 5. Гидроцилиндр 5 концентрично установлен внутри заполненного рабочей жидкостью цилиндрического резервуара 6, поддерживаемого новоротными колесами 7. К резервуару 6 жестко нрикренлеп корпус 8, в отверстие которого нропушена ось 9, на которую надета обойма 10 рукоятки управления 11. К концам оси 9 жестко прикреплены щеки 12, .между которыми установлен валик 13, пропущенный в отверстие корпуса 8 и жестко связанный своими конца.ми со щеками 12. В корпусе 8 размещены основной и дополнительный насосы, плунжеры 14 и 15 которых связаны со пхеками 12 и установлены соосно друг другу. На внутренней цилиндрической поверхности обоймы 10 выполнены впадины 16, в которых размещены шарики 17, а на цилиндрической поверхности оси 9 выполнены винтовые канавки 18 для взаимодействия с щариками 17. Нодплунжерные полости 9 и 20 соединены через всасывающие клананы 21 и 22 с резервуаром 6 и через нагнетательные клапаны 23 и 24 - с нодпорщневой полостью 25 гидроцилиндра 5. Подпоршневая полость 25 гидроцилиндра 5 соединена через выпускной клапан 26 с резервуаром 6. С небольшим зазором от выпускного клапана 26 установлен золотник 27, взаимодействующий с шариками 28 и 29 всасывающих клапанов 21 и 22. Для управления золотником 27 имеется переключающее золотниковое устройство, состояпдее из скобы 30, шарнирно закрепленной на рукоятке управления 11, прикрепленного к ней тросика 31, шайбы 32 поворотной относительно обоймы 10 посредством связанной с ней серьги 33, к которой прикреплен тросик 31, кинематически связанной с щайбой 32 дополнительной оси 34, пропущенной в дополнительное отверстие 35 корпуса 8, к концу которой прикреплена планка 36, связанная с золотником 27. На внутренней цилиндрической поверхности шайбы 32 выполнены впадины 37, в которых размещены шарики 38, на внещней поверхности обоймы 10 выполнены винтовые канавки 39 для взаимодействия с щариками 38. При транспортировании тележки к месту погрузки скобу 30 устанавливают в среднее положение «транспортирование. При этом золотник 27 занимает такое положение, что жидкость свободно перекачивается из подплунжерной полости 19 в подплунжерную нолость 20 и обратно, так как щарики 28 и 29 клапанов 21 и 22 отжаты. Зате.м грузовые вилы 1 заводят под груз, переключают скобу 30 в крайнее нижнее положение «подъем. При этом щайба 32 поворачивается относительно обоймы 18 и одновременно за счет винтовых канавок 39 и взаи.модействующих с ними щариков 38 перемещается в осевом направлении, увлекая за собой дополнительную ось 34, а соответственно планку 36 и золотник 27, который возвращает клананы 21 и 22 в свои седла, и свободное перетекание жидкости из подплунжерной полости 19 в подплунжерную нолость 20 прекращается. При движении рукоятки управления 11 вниз обойма 10 вращается относительно оси 9, которая за счет взаимодействия щариков 17 с винтовыми канавками 1г8 перемещается относительно обоймы в осевом направлении, вызывая осевое перемещение валика 13, воснрини.мающего крутящий момен-1, возникающий в оси 9, и плунжеров 14 и 15, один из которых - плунжер 14 работает в режи.ме нагнетания через клапан 23 в подпорщневую нолость 25 гидроцилиндра 5, а другой плунжер 15 работает в режиме всасывания рабочей жидкости через клапан 21 из резервуара 6, при этом щток 4 гидроцилиндра 5 выдвигается и грузовые вилы 1 с грузом поднимаются на определенную высоту. При движении рукоятки управления 11 ось 9 перемещается в осевом направлении в противоположную сторону, при этом плунжер 14 будет работать в режиме всасывания через всасывающий клапан 22 рабочей жидкости из резервуара 6, а плунжер 15 будет работать в режиме нагнетания через клапан 21 в подпоршневую полость 25 гидроцилиндра 5, и его шток 4 выдвигается, поднимая грузовые вилы 1 на определенную высоту. Рукоятку управления 11 качают до тех пор, пока шток 4 гидроцилиндра 5 не выдвинется на весь свой рабочий ход и не поднимет грузовые вилы 1 на максимальную высоту. Зате.м скобу 30 устанавливают в положение «транспортирование и перемешают тележку с грузом в требуемое место. Для осуществления разгрузки скобу 30 устанавливают в верхнее положение, при этом через тросик 31 и серьгу 33 поворачивается шайба 32, что вызывает перемещение дополнительной оси 34 и золотника 27 в сторону открытия выпускного клапана 26. При этом подпоршневая полость 25 гидроцилиндра 5 соединяется с резервуаром 6, и грузовые вилы 1 под действием собственного веса и веса груза опускаются. Формула изобретения 1. Ручная грузоподъемная тележка, содержащая установленные на выдвижных роликах грузовые вилы, связанные через несущий кронщтейн со щтоком гидроцилиндра, концентрично установленного внутри заполненного рабочей жидкостью резервуара, плунжерный насос, приводимый рукояткой управления, закрепленной посредством оси с возможностью поворота в вертикальной плоскости в корпусе, жестко связанном с резервуаром, и переключающее золотниковое устройство, причем рабочая полость насоса соединена через всасывающий клапан с резервуаром и через нагнетательный клапан - с подпорщневой полостью гидроцилиндра, отличающаяся тем, что, с целью повыщения производительности тележки путем ускорения погрузочно-разгрузочных операций, она снабжена щеками, жестко закрепленными на концах оси поворота рукоятки управления, валиком, концы которого жестко связаны с указанными щеками, и дополнительным плунжерным насосом, при этом плунжеры обоих насосов связаны с указанными щеками и размещены соосно между последними, в корпусе выполнены отверстия, в которые пропущен упомянутый валик, на оси поворота рукоятки управления выполнены винтовые канавки, рукоятка управления установлена на упомянутой оси посредством обоймы, на внутренней цилиндрической поверхности которой выполнены впадины с размещенными в них щариками для взаимодействия с винтовыми канавками оси, причем рабочая полость дополнительного насоса сообщена через дополнительный всасывающий клапан с резервуаром, а с подпорщневой полостью гидроцилиндра - через дополнительный нагнетательный клапан. 2. Тележка по п. 1, отличающаяся тем, что переключающее золотниковое устройство выполнено в виде закрепленной на рукоятке управления поворотной в вертикальной плоскости скобы, поворотной относительно обоймы шайбы, которая связана посредством серьги и тросика с указанной скобой, и кинематически связанной с щайбой дополнительной оси, пропущенной в дополнительное отверстие, выполненное в корпусе, при этом на одном конце дополнительной оси закреплена планка, связанная с золотником, на наружной цилиндрической поверхности обоймы выполнены винтовые канавки, а на внутренней цилиндрической поверхности щайбы выполнены впадины, в которых размещены щарики для взаимодействии с указанными канавками. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР jYo 489668, кл. В 62 В 1/14. 1973 (прототип-) .
Шаг. I
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручная грузоподъемная тележка | 1980 |
|
SU1044529A1 |
| Ручная грузоподьемная тележка | 1973 |
|
SU489668A1 |
| РУЧНАЯ ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА | 1992 |
|
RU2015051C1 |
| Гидравлический опрокидывающий механизм кабины грузового автомобиля | 1984 |
|
SU1217711A1 |
| Погрузчик | 1977 |
|
SU679520A1 |
| Гидроцилиндр | 1986 |
|
SU1333890A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Нагнетательное устройство дляВпРыСКА ТОплиВА B дВигАТЕльВНуТРЕННЕгО СгОРАНия | 1974 |
|
SU852180A3 |
| Гидравлическая система управления навесными орудиями трактора | 1972 |
|
SU441881A1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ИЗМЕНЯЕМОЙ ТАКТНОСТИ | 1994 |
|
RU2090767C1 |
23
Фи2.4
