(54) АДАПТИВНЫЙ РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный импульсный регулятор для нестационарных объектов с запаздыванием | 1981 |
|
SU993207A1 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2015 |
|
RU2605946C1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Адаптивная система регулирования | 1978 |
|
SU813356A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Противоблокировочное устройство тормозной системы транспортного средства | 1979 |
|
SU1662884A1 |
| Адаптивный регулятор | 1980 |
|
SU911462A1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| Устройство для регулирования уровня воды на участке канала | 1986 |
|
SU1418407A1 |
| Способ автоматического регулирования частоты вращения ротора синхронного генератора и регулятор для его реализации | 2023 |
|
RU2823536C1 |
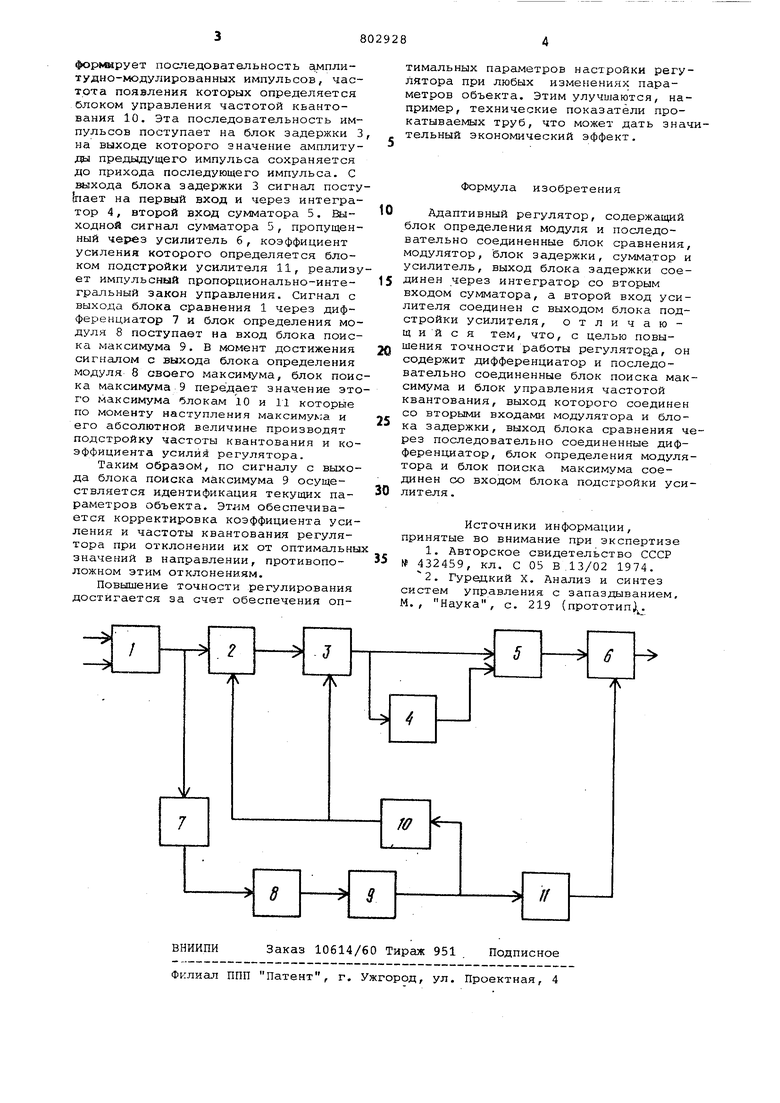
Изобретение относится к технике автоматического регулирования и может быть использовано, например, в трубопрокатном производстве, теплоэнергетике и предназначено для управ ления процессами с переменным коэффи циентом усиления и запаздыванием. Известный импульсный пропорционал но-интегральный регулятор построен н основе широтно-импульсного модулятор скважность импульсов которого определяется посредством блока динамической постройки в зависимости от те кущих значений переменных параметров процесса ij. Недостаток известного регулятора низкая точность его работы. Наиболее близким техническим решением к изобретению является импульс ный пропорционально-интегральный регу , содержащий блок определения модулятора и последовательно соединенные блок сравнения, модулятор, блок задержки, сумматор и усилитель. Выход блока задержки соединен через интегратор со вторым входом сумматора, а второй вход усилителя соединен с выходом подстройки усилите- , ля 2. Недостатком известного регулятора является невысокая точность регулирования при изменении одновременно двух параметров объекта. Цель изобретения заключается в повышении точности регулирования. Эта цель достигается тем, что регулятор содержит дифференциатор и последовательно соединенные блок поиска максимума и блок управления частотой квантования, выход которого соединен со вторыми входами модулятора и блока задержки. Выход блока сравнения через последовательно соединенные дифференциатор, блок определения модуля и блок поиска максимума соединен,со входом блока подстройки усилителя. На чертеже дана структурная схема предлагаемого регулятора. Регулятор содержит блок сравнения 1, модулятор 2, блок задержки 3, интегратор 4, сумматор 5, усилитель 6, дифференциатор 7, блок определения модуля 8, блок поиска максимума 9, блок управления частотой квантования 10 и блок подстройки 11 усилителя. Ошибки рассогласования C(t), получаемая на выходе блока сравнения 1, поступает на модулятор 2, который
Форкшрует последовательность амплитудно-модулиронанных импульсов, частота появления которых определяется блоком управления частотой квантования 10. Эта последовательность импульсов поступает на блок задержки 3 на выходе которого значение амплитудам предыдущего импульса сохраняется до прихода последующего импульса. С выхода блока задержки 3 сигнал посту пает на первый вход и через интегратор 4, второй вход сумматора 5. Выходной, сигнал сумматора 5, пропущенный через усилитель 6, коэффициент усиления которого определяется блоком подстройки усилителя 11, реализует импульсный пропорционально-интегральный закон управления. Сигнал с выхода блока сравнения 1 через дифференциатор 7 и блок определения модуля 8 поступает на вход блока поиска максимума 9. В момент достижения сигналом с выхода блока определения модуля 8 своего максимума, блок поиска максимума 9 передает значение этого максимума блокам 10 и 11 которые по моменту наступления мaкcимy ;a и его абсолютной величине производят подстройку частоты квантования и коэффициента усилий регулятора.
Таким образом, по сигналу с выхода блока поиска максимума 9 осуществляется идентификация текущих параметров объекта. Этим обеспечивается корректировка коэффициента усиления и частоты квантования регулятора при отклонении их от оптимальны значений в направлении, противоположном этим отклонениям.
Повышение точности регулирования достигается за счет обеспечения оптимальных параметров настройки регулятора при любых изменениях параметров объекта. Этим улучшаются, например, технические показатели прокатываемых труб, что может дать значительный экономический эффект.
Формула изобретения
Адаптивный регулятор, содержащий блок определения модуля и последовательно соединенные блок сравнения, модулятор, блок задержки, сумматор и усилитель, выход блока задержки соединен через интегратор со вторым входом сумматора, а второй вход усилителя соединен с выходом блока подстройки усилителя, отличающийся тем, что, с целью повышения точности работы регулятоЕ а, он содержит дифференциатор и последовательно соединенные блок поиска максимума и блок управления частотой квантования, выход которого соединен со вторыми входами модулятора и блока задержки, выход блока сравнения чрез последовательно соединенные дифференциатор, блок определения модулятора и блок поиска максимума соединен оо входом блока подстройки усилителя .
Источники информации, принятые во внимание при экспертизе
