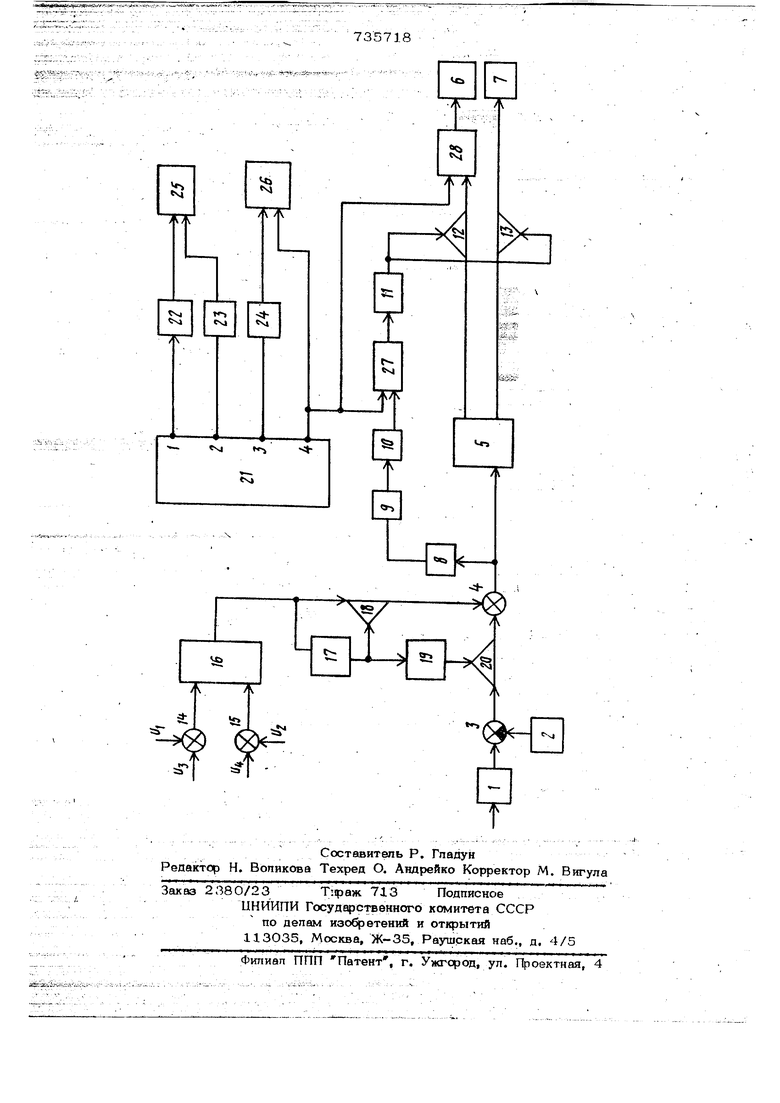
Цепь изобретения - повышение производительности землеройно-транспортной машины за счет автоматического управления положением заслонки при копании грунта в функции времени и автоматической установки ковша и заслонки в транспортное положение по окончании копания. Это достигается тем, что устройство снабжено двумя схемами ИЛИ, тремя фор мирователями импульсов, выходнь1ми каскадами подъема и опускания заслонки и блоком управления. этом входы выходного каскада подъема заслонки через соответствующие формирователи импульсо подключены к двум выходам блока управления, к третьему выходу котфого подключен через третий формирователь mviпульсов один из входов выходного каскада опускания заслонки, второй вход которого соединен с четвфтым вьпс од ом блока управления и со входами обеих схем ИЛИ, Одна из них подключена между импульсными элементами и одной из схем НЕ, а другая входом подключена к выходу одного из управляемьрс. ключей, а вы- ходом ко входу выходного каскада выглубления рабочего органа. На чертеже представлена логическая схема устройства для автоматического управления рабочим органом землеройнотранспортной машины. .Устройство содержит контур управления по сигналу, пропорциональнсму силе тяги машины, включающий измерительный Iи задающий 2 блоки, сумматоры 3, 4, трехпозииионный релейный элемент 5, вы ходные каскады выглубления 6 и заглубления 7 рабочего органа, выпрямитель 8 амплитудный дискриминатор 9, импульсный элемент 1О, логическую схему НЕ IIи управляемые ключи 12 и 13. Устройство также содержит контур управления по сигналам буксования движи телей, включающий сумматоры 14 и 15, сравнивающие напряжения, пропсрциональные угловым скоростям соответствующих движителей я выделяющие их сигнал рассогласования, пропорциональный буксованиго, функциональный преобразователь 16 амплитудный дискриминатчзр 17, срабатывающий при сигнале рассогласования в этом контуре больше заданного и включающий управляемый ключ 18, а чфез НЕ 19 вы,ключающий управляемый ключ 2О. Кроме того, устройство содержит кон тур управления положением заслонки и окончанием копания включающий блок управления 21, выходы которого через ффмирователи импульсов 22, 23 и 24 соединены с В|ХОдами выходных каскадов подъема и опускания заслонки 25 и 26 соответственно, и схемы ИЛИ 27 и И 28, входы которых соединены с одним из входов блока управления 21, Устройство работает следующим образом. В исходнсад положении перед началом копания на пульте управления в кабине оператора устанавливается заданное значение силы тяги, которое поддерживается постоянным при копании, и времени копания t j . При этом ковш находится около земли, а передняя заслонка полностью опущена. Устройство включается в работу опфатором с помощью органа управления, расположенного на пульте. Вследствие того, что сигнал с задающего блока 2 больше чем с измерительного 1, срабатывает трехпозиционный релейный элемент 5 и через открытый ключ 13 включает выходной каскад заглубления коэша 7. Ковш заглубляется. Одновременно С пфвого выхода блока управления выдается сигнал на формирователь импульса 22, который формирует 1тмпульс длительностьюгде h - расстояние, на котором устанавливают заслонку относительно днища ковша в начале копания (h, 0,6-0, 7 м) V - скорость подъема заслонки. При этом импульс длительностью t подается на выходной каскад подъема заслонки. Заслонка устанавливается относительно днища ковша на h, , и предлагаемое устройство, изменяя положение рабочего органа в зависимости от сигнала рассогласования, обеспечивает набор грунта с наибольшей производительностью. В момент времени t| (О,4-0,5): с третьего выхода блока управления выдается сигнал на формирователь импульса 24, который фор 1фует импульс длительностьюi,-(N-)Vo, где hg - расстояние, на котором устанавливают заслонку относительно днища ковша после прохождения скрепфом (0,4О,5) длины копания (h O,2-0,4 м) VQ - скорость опускания заслонки. этом импульс длительностью f подается на выходной каскад опускания заспонки. Заслонка опускается и устанав5
ливается относительно дниша ковша на Н„ и устройство, изменяя положение рабочег фгана в зависимости от сигнала рассогласования, обеспечивает набор грунта с наибольшей производительностью,
В момент времени Ц (0,6-0,7)t со второго выхода блока управления выдается сигнал на формирователи импульса 23, который формирует импульс длительностью
О
где hj - расстояние, на котором необходимо установить заслонку относительно дншца ковша после прохождения скреперо (0,6-0,7) длины копания (,3-0,5 м
При этом импульс длительностью tц подается на выходной каскад подъема заслонки. Заслонка поднимается и устанавливается относительно дншда ковша Hah и устройство, изменяя положение рабочего органа в зависимости от.сигнала рассогласования, опять обеспечивает набор грунта с наибольшей производительностью
В момент времени , соответствующий окончанию копания, с четвертого Bbixoha бпока управлен;й1 выдается сигнал на выходной каскад опускания заспонки, ерез схему ИЛИ 27 на: схему НЕ И, а через схему И 2.8 на выходной каскад вьп лубления ковша. этом заслонка опускается, ключи 12 ,и 13 закрьгааются, а ковш устанавливается в транспорт ное положение.
установке заслонки в транспортное положение конечным выключателем разрьшается цепь между выходным каскадом опускания заслонки и эпбктрогидравлическим приводсм, а при установке ковша в транспортное положение другой конечный выключатель разрывает цепь питания устройства.
Г именение предлагаемого устройства повышает гроизводительность эемпэроКно-транспортной машины за счет автоматическЬго управления положением заслон- ки относительно днища ковша при копании
7186
грунта и автоматической установки ковш и заслонки в транспортное положение по окончании копания.
Формула изобретения
Устройство для автоматического управления рабочим органом землеройнотранспортной машину, включающее измерительный и задающий блоки, сум маторы трехпозиционный репейный элемент, выходные каскады выгяубления и заглубления рабочего органа, выпрямитель, амплитудные дис1фиминаторы, импульсный элемент, функциональный преобразователь, схемы НЕ и управляемые ключи, отличающееся тем, что, с целью повышения производительности землеройнр-транспфтной маигины, оно снабжено двумя схемами ИЛИ, тремя формирователями импульсов, выходными каскадами подъема и опускания заслонки и блоком управления, причем входы выходного каскада подъема заслонки через соответствующие формирователи импульсов подключены к двум выходам блока управленю, к третьему выходу которого подключен через третий формирователь импульсов один из входов выходного каскада опускания заслонки, второй вход которого соединен с четвертым выходом блока управления и со входами обеих схем ИЛИ, одна из которыхподключена,между импульсным элементом и одной из схем НЕ, а другая входом подключена к выходу одного из управляемых ключей, а выходсш ко входу выходного каскада выг)тубления рабочего органа.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3064371, кл. 37-127, опублик. 1962.
2.Авторское свидетельство СССР
№ 420068, кл. Б О2 F 9/20, 1969.
3.Авторское свидетельство СССР №557156, кл. Е О2 F 9/20, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления рабочим органом землеройнотранспортной машины | 1975 |
|
SU557156A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| Система автоматического управления рабочим органом транспортной машины | 1977 |
|
SU940651A3 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| Система автоматизации планировочных работ | 1983 |
|
SU1099014A1 |
| Радиотелеметрическое устройство контроля и учета работы шагающего экскаватора | 1987 |
|
SU1472573A1 |
| Способ управления ковшом скрепера и устройство для его осуществления | 1987 |
|
SU1495417A1 |
| Ковш скрепера | 1981 |
|
SU1048063A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1513091A1 |
| Тренажер машиниста одноковшового экскаватора | 1985 |
|
SU1260998A1 |