Изобретение относится к механической обработке плодов перед консер вированием, а именно к ориентации и разрезанию . Известна машина для ориентации и разрезания плодов, содержащая загрузочное устройство с приспособлением для предварительной ориентации, транспортеры, механизм контроля ориентации, вал с кулачками, ориентатор с рабочим органом, механизм фиксации и ножевое приспособление для разрезания плодов ll. Недостатком устройства является то, что оно может осуществить только грубую ориентацию плодов. При этом не может быть обеспечено строгое сов падение биологической оси плода с осью симметрии ножа. Цель изобретения - осуществление более точной ориентации, обеспечивающей совпадение биологической оси плода с осью симметрии ножа. Поставленная цель достигается тем что в машине для ориентации и разрезания плодов, содержащей загрузочное устройство с приспособлением для предварительной ориентации, транспрр теры, механизм контроля ориентации, вал с кулачками, ориентатор с рабочим органом, механизм фиксации и ножевое приспособление для разрезания плодов, ориентатор снабжен направляющими- и представляет собой рычажный симметричный-пантограф с подпружиненными рычагами и упором, верхнее и нижнее шарнирные соединения рычагов установлены в направляющих с возможностью, вертикального перемещения, а упор расположен под нижним шарнирным соединением, при этом ориентатор имеет кулачки со штангами, а верхнее шарнирное соединение рлчагов пантографа и упор соединены со штангами кулачков, рабочий ор- ган ориентатора выполнен в виде двух двухпальцевых вилок, пальцы каждой из которых соединены под углом 90. Кроме того. Механизм предварительной ориентации состоит из лотка, желоба и эластичной трубы, установленных последовательно. Механизм контроля ориентации снабжен выталкивателем, выполненным в виде поршня из эластичного материала, шток которого соединен с кулачком. Механизм фиксации образован двумя двуплечими рычажками-защелками.
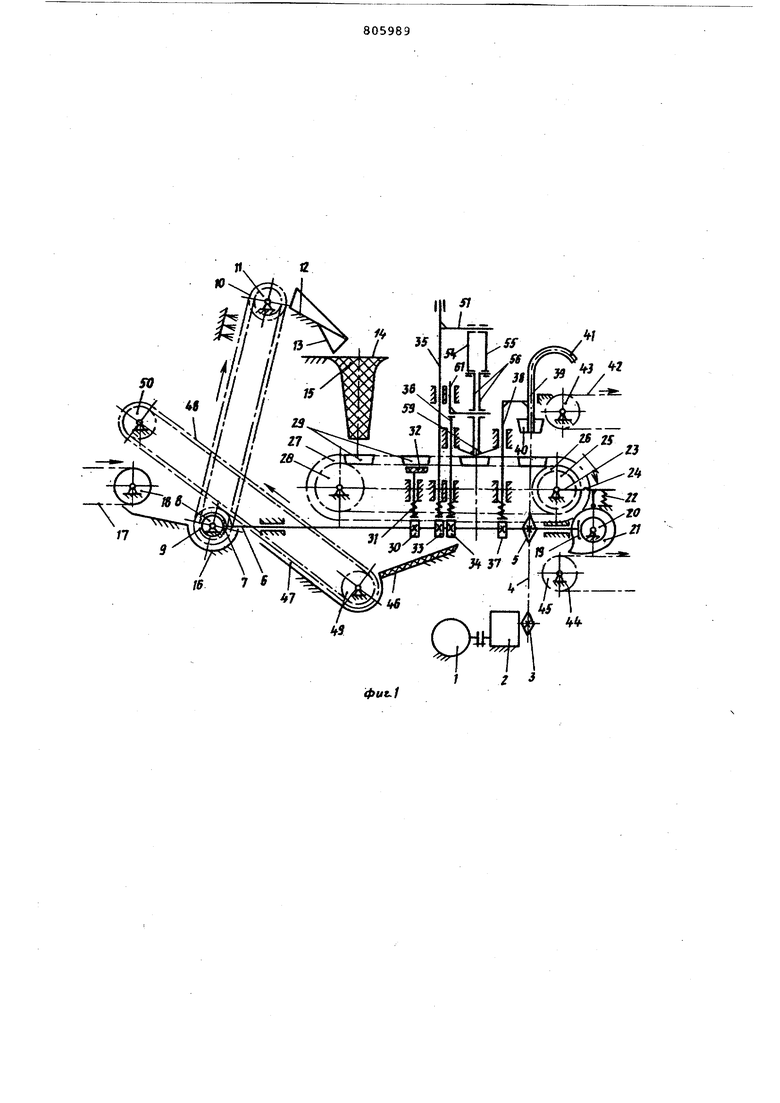
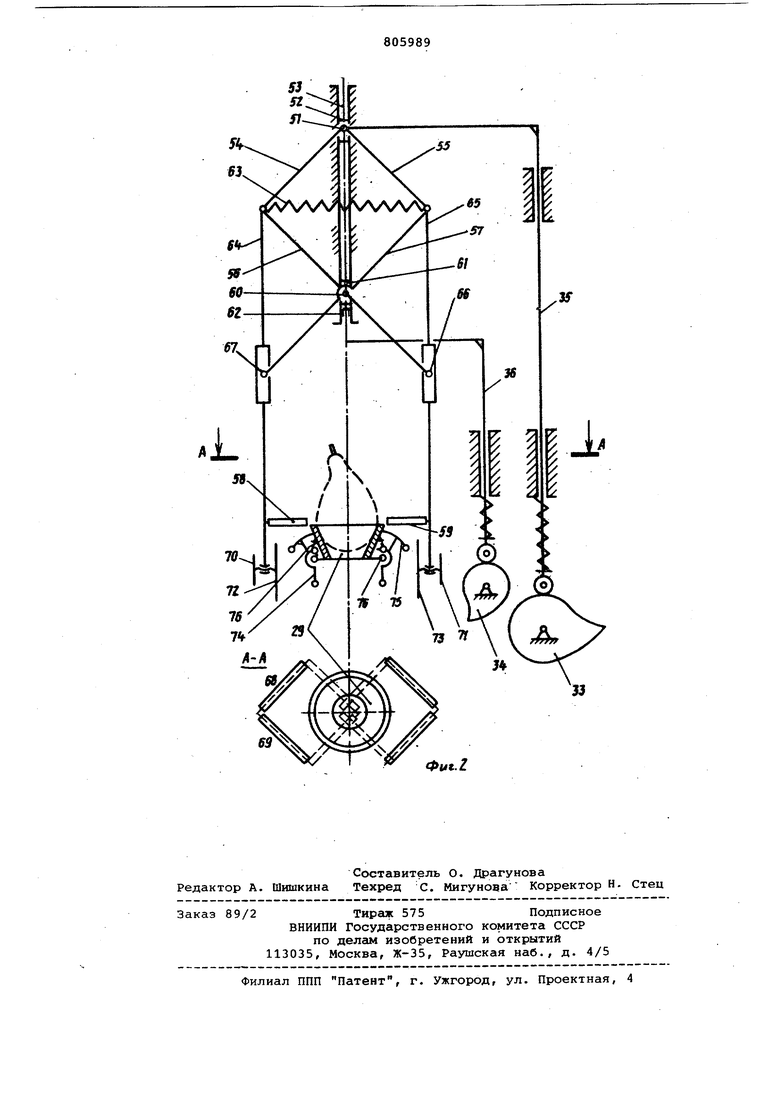
На фиг. 1 изображена предлагаемая машина для ориентации и разрезания плодов, общий вид; на фиг. 2 - ориентатор, общий вид.
Машина содержит электродвигатель
1,соединенный муфтой с редуктором
2,на вьоходноМ валу которого закреплена звездочка 3, соединенная цепью 4 со звездочкой 5, закрепленной на кулачковом валу 6. На торце вала закреплена коническая шестерня 7, находящаяся в закреплении с зубчатым колесом 8, закрепленном на одном велу со звездочкой 9, являющейся ведущей звездочкой ковшового трансформатора 10, соединенного с натяжной звездочкой 11. с торца транспортера закреплен- механизм предварительной ориентации, содержащий наклонный плоский лоток 12, снабженный с торца желобом 13, под ним закреплено горизонтальное кольцо 14, на котором по периметру закреплена упругая эластичная труба 15.
Под нижним торцом транспортера закреплено КОЕЛЛТО 16, которое своим вторш торцом расположено под пластинчатым транспортером 17, снабженным ведущей звездочкой 18. На втором торце вала 6 закреплена коническая шестерня 19, находящаяся в зацеплении с зубчатым колесом 20, закрепленном на одном валу с кулачком 21, к которому с помощью пружины 22 прижат толкатель 23, на котором шарнирно закреплена собачка 24, которая находится в зацеплении с храповиком 25, жеско закрепленном на одном валу со звездочкой 26 ковшового транспортера 27, снабженного натяжной звездочкой 28.
Звенья ковшового транспортера выполнены в виде конических колец 29, На кулачковом валу 6 жестко закрепле кулачок 30 механизма контроля ориентации, к которому подпружена штанга 31 выталкивателя, на торце которой, закреплен поршень из эластичного материала 32, а также кулачки 33 и 34 ори нтатора.
К кулачку 33 подпружинена штанга 35 ориентатора, а к кулачку 34 - шта га 6 ограничителя упора. На кулачковом валу жестко закреплен также кула;1ок 37, к которому подпружинена штанга 38 ножевого приспособления, ad которой закреплен трубчатый нож 3SJI,..несущий на себе лезвия плоского ножа 40.
К трубчатому ножу закреплен изогнутый патрубок 41. На уровне торца патрубка расположен транспортер 42, снабженный натяжной звездочкой 43. Под ковшовым транспортером 27 расположен транспортер 44, снабженный на тяжной звездочкой 45. Под транспорт тером 27, в зоне выталкивателя, расположен наклонный лоток 46 корыта 47 в котором помещен ковшовый транспортер 48, снабженный натяжной звездочкой 49 и приводной звездочкой 50.
На штанге 35 ориентатора закреплен палец 51, установленный шарнирнс на ползуне 52, находящемся в вертикальных направляюцих 53. К пальцу 51 шарнирно присоединены одинаковой длины рычаги 54 и 55, к которым, сооттветственно, шарнирно присоединены одинаковой длины рычаги 56 и 57, соединенные между собой с помощью пальца 60, закрепленного на ползуне 61, находящемся в направляющих 53, в них находится и упор 62, закрепленный на торце штанги 36 ограничителя, к которому постоянно прижат с помощью пружины 63 ползун 61.. к pHsjaraM 56 и 57 шарнирно присоединены штанги 64 и 65 с прорезями, в которых свободно сидят пальцы 66 и 67, закрепленные на рычагах 56 и 5,7. К штангам 64 и 65 закреплены вилки 58 и 59, на которых, как на осях, свободно насажены втулочки 68 и 69. На нижних концах штанг 64 и 65 в отверстиях с резьбой помещены установочные: винты 70 и 71 к торцам которых под прямым углом закреплены вертикально расположенные плитки-проректоры 72 и 73. Механизм фиксации представляет собой .расположенные на звеньях ковшового транспортера шарнирно закрепленные, двуплечие рычажки-защелки 74 и 75, снабженные фиксаторами 76.
Машина работает следующим образом.
При вращении ротора злектродвига теля 1 движение через муфту, редуктор 2, звездочку 3 и цепь 4 передается звездочке 5, вращающей кулачковый вал 6 вместе с шестерней 19, кулачками 37, 34, 33 и 30 и шестерней 7, которая вращает зубчатое колесо 8, а с ним и звездочку 9, приводящую в движение ковшовый транспортер 10, который захватывает из корыта 16 плоды, загруженные в него транспортером 17. Транспортер 10 сбрасывает по одной груше на наклонную плоскость лотка 12, далее - в сторону желоба 13, в зластичную трубу 15 и коническое кольцо 29. При вращении шестерни 19 вращается и зубчатое колесо 20 с кулачками 21, периодически прокачивающим толкатель 23, который проворачивает храповик 25 вместе со звездочкой 26, движущей транспортер 27. При его движении .плод (груша) подается в зону движения ВИЛОК 58 и 59 ориентатора, приводимого в действие кулачками 33 и 34.
В фазе выстоя транспортера 27 вилки 58 и 59 раскрываются и опускаются на грушу, затем сближаются и поднимаются, при этом происходит ориенТация ее, заключающаяся в смещении биологической оси груши до ее совпадения с вертикальной осью симметрии конического кольца и фиксирование в кольце 29, с помощью рычажных заще лок 74 и 75. Происходит это следующ . В начальной фазе выстоя транспор тера ползуны 52 и 61 находятся в своем крайнем верхнем положении в вертикальных направляющих 53. При этом вилки 58 и 59 максимально сбли жены пружиной 63 и находятся над плодоножкой груши. При последующем опуск.ании ползуна 52 и выстое ползу 61 происходит максимальное раздвига ние вилок 58 и 59. Затем при продол жгиощемся совместном опускании ползуна Ь2 и ползуна 61, опиракицегося на упор 62, опускаются раскрытые вилки 58 и 59 до уровня верхнего торца конического кольца 29. На следукядем этапе ползун 52 идет вверх, а ползун 61 выстаивает. При этом, под действием пружины 63 штанги 64 и 65, вместе с вилками 58 и 59 сближаются и одновре- . менно поднимаются вверх, причем, сближаясь симметрично вертикальной оси, проходящей через центр конического кольца 29, вилки 58 и 59 Пе ремещают биологическую ось груши до совпадения с осью симметрии коль ца 29. При сближении штанг 64 и 65 фближаются плитки протекторов 72 и 73, достигая в соответствии с регулировкой, плеч рычажков J4 и 75. Пр этом острия рычажков-защёлок сквоз6 отверстия .в кольце 29 входят в груш что происходит сразу после завершения процесса ориентации, независи мо от размера и формы груши. Когда вилки 58 и 59 при своем движении вверх достигают крайнего положения, исчезает контакт между ними и груше и упор поднимается в свое верхнее положение. В фазе выстоя транспортера 27, с помощью кулачка 37, ножи 3 и 40, опускаясь на плоды, разрезают их и удаляют с помощью патрубка 41 сердцевины плодов, сбрасывая их на тран портер 42, Одновременно, при вргицении кулачка 30, штанга 31 выталкива теля выталкивает из конических колец 29 те плоды, которые случайно ориентированы плодоножкой вниз, на лоток 46, откуда они с помощью ковшового транспортера 48 сбрасываются на пластинчатый транспортер 17, который вторично направляет их на перераб ку. Предлагаемая машина для ориентации и разрезания плодов позволяет осуществить точное совпадение биоло гической оси груши, проходящей через основание ее плодоножки с осью симметрии ножа, разрезающего грушу. Это решает проблему механизации про цесса обработки груш перед консерви рованием, выполняемого, в основном, вручную, из-за отсутствия надежных Устройств для ориентации груш. Предлагаемая машина позволит надежно удалить из груши плодоножку вместе с сердцевиной и одновременно разрезать ее на несколько долек, независимо от размеров и формы груши. Благодаря механизации трудоемкого процесса, предлагаемая машина даст значительный экономический эффект, ориентировочно 16 тысяч рублей в год от одной машины. Формула изобретения 1.Машина для ориентации и разрезания плодов, преимущественно груш, содержащая загрузочное устройство с приспособлением для- предварительной ориентации,.транспортеры, механизм контроля ориентации, вал с кулачками, ориентатор с рабочим органом, механизм фиксации и ножевое приспособление для разрезания плодов, о тличающаяся тем, что, с целью более точной ориентации,обеспечивающей совпадение биологической оси плода с осью симметрии ножа, ориентатор снабжен направлякнцими и представляет собой рычажный симметричный пантограф с подпружиненными шарнирными рычагами и упором, верхнее и нижнее шарнирные соединения рычагов установлены в направляющих с возможностью вертикального перемещения, la упор расположен под нижним шарнирньм соединением, при этом ориентатор имеет кулачки со штангами, а верхнее шарнирное соединение рычагов пантографа и упор соединены со штангами кулачков, рабочий орган ориентатора выполнен в виде двух двухпальцевых вилок, пальцы каждой из которых соединены под углом 90. 2.Машина по п.1, о.тличающ а я с я тем, что механизм предварительной ориентации состоит из лот-° ка, желоба и эластичной трубы, установленных последовательно. 3.Машина по п.1, о тли ч ающ а я с я тем, что механизм контроля ориентации снабжен выталкивателем, выполненным в виде поршня из эластичного материала, шток которого соединен с кулачком. 4. Машина пОп.1, отличающаяся тем, что механизм фиксации образован двумя двуплечими рычажками- з аще лк г1ми. Источники информации, принятые во внимание при экспертизе 1. Патент США 4010842, Кл. 198-394, 1977.
69
33
Фиг. I
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ РЕЗКИ ПЛОДОВ НА ДОЛЬКИ И ВЫРЕЗКИ СЕРДЦЕВИНЫ | 1990 |
|
RU2020836C1 |
| Устройство дл маркировки изделий | 1969 |
|
SU496613A1 |
| Машина для прививки черенков | 1987 |
|
SU1475510A1 |
| Машина для ориентации и резки плодов | 1986 |
|
SU1405787A2 |
| Способ обрезки стоп бумаги | 1974 |
|
SU704778A1 |
| МАШИНА ДЛЯ ОБЕРТКИ И УКЛАДКИ ПЛОДОВ В ЯЩИКИ | 1954 |
|
SU110120A1 |
| Машина для намотки тесьмы заданной длины в мотки | 1959 |
|
SU129626A1 |
| Машина для прививки виноградной лозы | 1957 |
|
SU121991A1 |
| Устройство для изготовления и надевания чехлов на конденсаторы | 1985 |
|
SU1372394A1 |
| Машина для механической обработкициТРуСОВыХ плОдОВ | 1979 |
|
SU793558A1 |