(54) МЕХАНИЗМ УРАВНОВЕШИВАНИЯ СТРЕЛЫ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм уравновешивания стрелы манипулятора | 1980 |
|
SU952579A2 |
| Механизм уравновешивания стрелы манипулятора | 1981 |
|
SU988547A1 |
| Механизм уравновешивания стрелы манипулятора | 1983 |
|
SU1090547A2 |
| Механизм уравновешивания стрелы манипулятора | 1981 |
|
SU982897A2 |
| МНОГОЦИЛИНДРОВЫЙ БЕСШАТУННЫЙ ОППОЗИТНЫЙ ЧЕТЫРЕХТАКТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2005 |
|
RU2296871C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2344031C2 |
| ПРЕОБРАЗОВАТЕЛЬ ДВИЖЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2007 |
|
RU2351783C2 |
| Двухрежимная трансмиссия транспортного средства | 1989 |
|
SU1708669A1 |
| Манипулятор | 1988 |
|
SU1521577A1 |
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
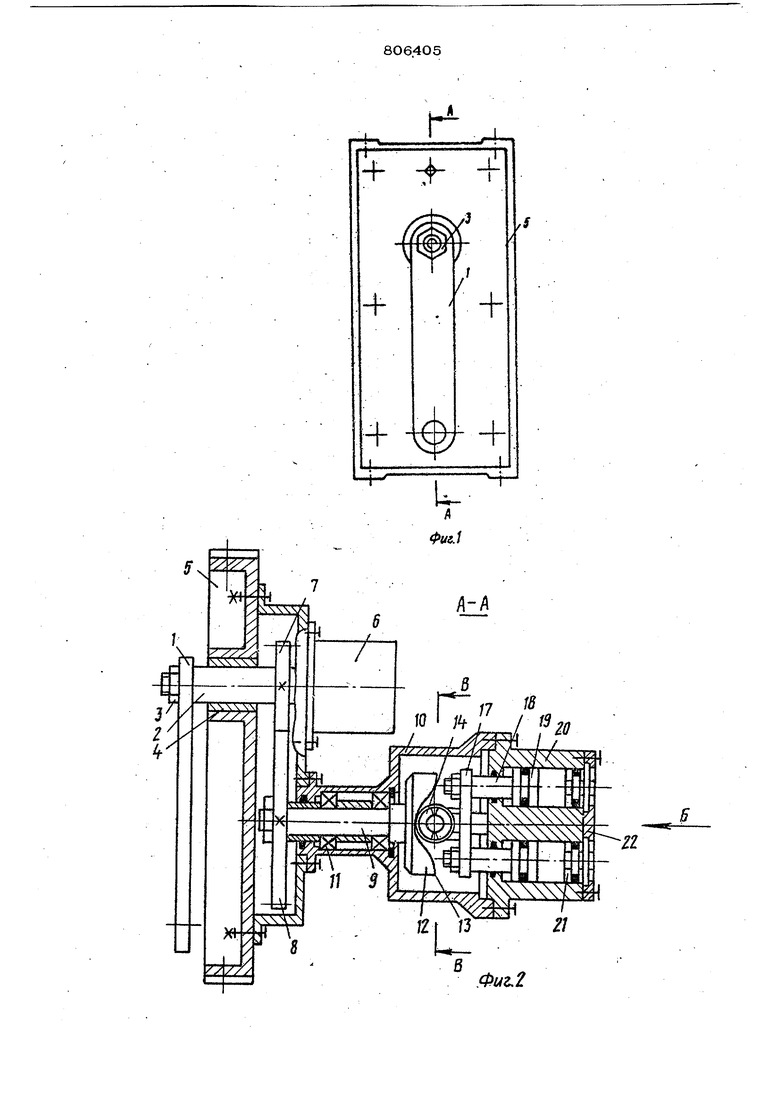

Изобретение относится к манипуля- торам дпя механизации технологических процессов, а именно к механизмам уравновешиванияк; стрелы Манипулятора, Известен механизм уравновешивания стрелы манипулятора, содержащий упругий элемент, кинематически связанный со стрелой через механическую nepteдачу l. Известное устройство не обеспечивает полного статического ура вновеишваifflH стрелы манипулятора. Цель изобретения - обеспечение полного статического уравновешивания стре ;лы. Поставленная цель достигается тем, что механизм уравновешивания снабжен силовым цилиндром, на ,штоке которого шарнирно установлены ролшси, а механическая пе редача содержит торцовый -кула чок, контактирующий с роликами, -и зубчатую передачу, связывающую кулачоц со с лой, причем рабочая поверхность кулачка выполнена по синусоиде, число полуволн которой равно произведению передаточного числа зубчатой передачи на шсло роликов.. На фиг. 1 показано предлагаемое устройство, общий вид, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 2, на фиг. 5 - развертка криволинейной поверхности поверхности кулачка. Механизм уравновещивш{ия стрелы 1 манипулятора содержит приводной вал 2 с гайкой 3. Приводной xBOit 2 ащается в йодщипнике 4, располЬженяом в корпусе 5. Дви1гатель 6 и. 7 жестко связаны р {фиводным волом 2 (фиг. 1 и 2)., С шестец ней 7 сцепляется шестерня 8 большего диаметра (передаточное число в данном случае равно двум), насаженная на промежуточный вал 9, находящийся в корпусе 1О и вращающийся в подщипнике 11. На противоположном конце промежуточного вала 9 аа1феплен кулачок 12, торец 13 которого вьшолнен DO синусоиде (фиг. 5). С этим торцом 13 взаимодействуют ролики 14, шар нирно расположенные на траверсе 15, которая, в свою очередь, с помощью оси 16 шгфшфно связана с направляющей 17 (фиг. 4), с которойскреплены штоки 18 и поршни 19 силовых шшиндров (в данном случае их четыре), а корпус 2О силовых шшивдров укреплен на корпусе 1О Противоположные концы цилиндров .закрыты крьшхкамн 21 я }шанцем 22. Отверстия 23предназначеныдля подвода к цилшздрам рабочей среды, Механизм уравновешивания работает следующим образом. Прн рабо1-е двигателя 6 н отклонешш стрелы 1 на угол возникает неуравнове шенный статический момент. Отклонение стрелы вызывает поворот вала 2, шестер ни 7 и сцепленной с ней шестерня 8 на угол, соответствующий передаточному числу {в данном случае передаточное число равно двум), поэтому шестерня 8 поворачивается на угол, равный половине угла поворота шестерни 7. Промежуточный вал 9, связанный с шестерней 8, поворачивается на тот же угол. При этом поворачивается кулачок 12, на торце 13 которого вьшолнена синусоидальная поверхность, и обесде чивается не только полное уравновешивание при любом значении углов поворота стрелы 1, йо и йозможность; разгрузк двигателя 6 при подъеме груза на стрел 1 путем повышения давления рабочейсреды в силовых цилиндрах. В таком сл чае роль двигателя 6 может быть све дена только к гдэеодолению трения и сил S4 случайного происхожд.еш1я, что позволяет обходиться двигателями меньшей мощности. Предлагаемый механизм имеет передаточное отношение шестеренной пары, равное двум, и количество роликов на траверсе, равное также двум. При этом число полуволн синусоидальной поверхности (торца) 13 равно четьфем, т.е. произведению передаточного числа зубчатой передачи на число роликов. Формула изобре-г-ения 1. Механизм уравновещивания стрелы манипулятора, содержащий упругий элемент, кинематически связанный со стрелой через механическую передачу, о тлнчающийся тем, что, с цепью обеспечения полного статического уравновешивания стрелы, он снабжен силовым цилиндром, на штоке которого шарнирно установлены ролики, а механическая передача содержит торцовый кулачок, контактирующий с роликами, и зубчатую передачу, связывающую кулачок со стрелой, причем рабочая поверхность кулачка выполнена по синусоиде. 2. Механизм по п. 1, о т л и ч аю щ и и с я тем, что число полуволн синусоиды равно произведению передаточного числа зубчатой передачи на число роликов. Источники информации, принятые во внимание при.экспертизе 1. Авторское свидетельство СССР № 476971, кл. В 25 J 1/02, 1973.
r
Фиг,2
Вид В
гг
zt
Ф14г.5
360
Фыг.4
