лачка 18 и, следовательно, схвата 17 на заданный угол, определяемый как профилем кулачка 18, так и установкой упора И. От кулачка 25 через ролики 27 происходит поворот рычага 28, который через серьгу 30 перемещает сателлит 31 зубчатого механизма 29 умножения. Поворот 28 осуществляется по закону, заданному профилем кулачка 25. Сателлит 31, обегая по зубчатому сектору, передает вращение через зубчатый сектор 33 опоре 2. Требуемый закон перемещения схвата 17 определяется не только профилями кулачков 20 и 25, но и их взаимным расположением. 3 з.п.ф-лы, 5 ил.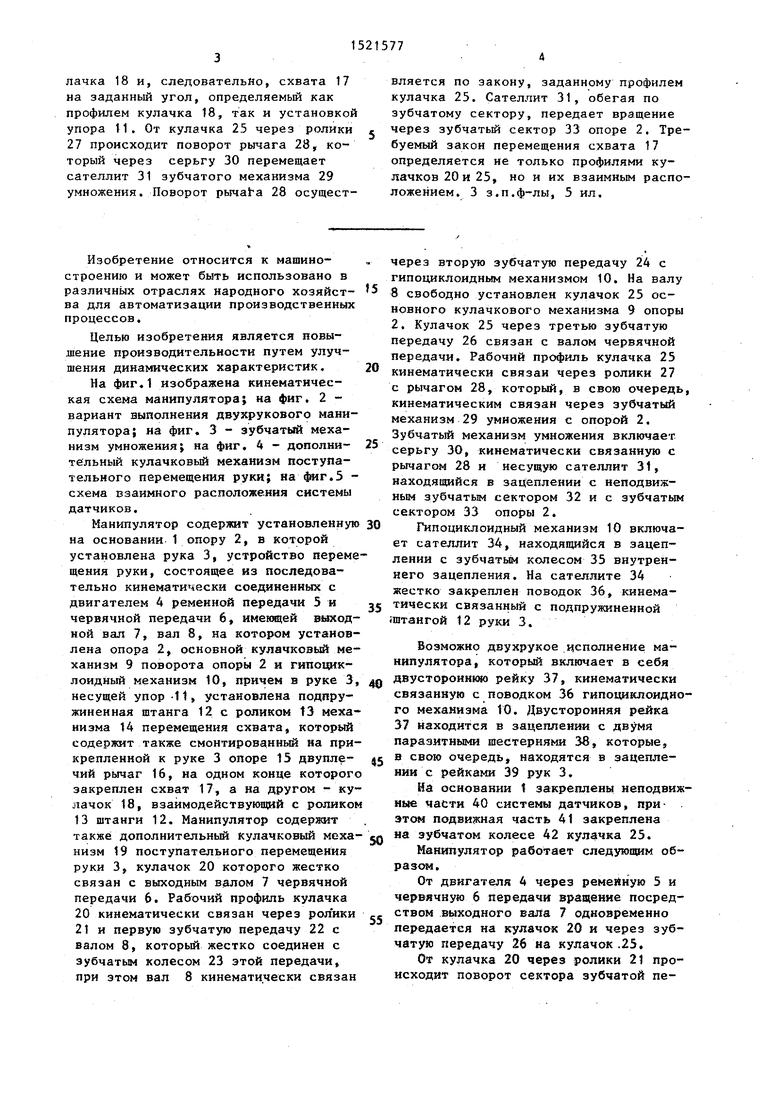
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1977 |
|
SU655522A1 |
| Манипулятор | 1984 |
|
SU1252161A1 |
| Манипулятор | 1979 |
|
SU844263A2 |
| Манипулятор | 1986 |
|
SU1328187A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Манипулятор | 1978 |
|
SU727423A2 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022769C1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Манипулятор | 1985 |
|
SU1281400A1 |
Изобретение относится к машиностроению и может быть использовано в различных отраслях народного хозяйства для автоматизации производственных процессов. Цель изобретения - повышение производительности путем улучшения динамических характеристик. От двигателя 4 через ременную 5 и червячную 6 передачи вращение одновременно передается на кулачок 20 и через зубчатую передачу 26 на кулачок 25. От кулачка 20 через ролики 21 происходит поворот сектора зубчатой передачи 22, который осуществляется по закону, заданному профилем кулачка 20. От сектора зубчатой передачи 22 движение передается зубчатому колесу 23, валу 8 и далее через зубчатую передачу 24 на сателлит 34 гипоциклоидного механизма 10. Сателлит 34, обегая по шестерне, через поводок 36 передает возвратно-поступательное движение руке 3. Перемещение руки 3 происходит до соприкосновения упора 11 с опорой 2. После остановки руки 3 и при продолжении вращения вала 8 происходит поступательное движение подпружиненной штанги 12 относительно руки 3. При выдвижении штанги 12 с роликом 13 относительно руки 3 происходит поворот кулачка 18 и, следовательно, схвата 17 на заданный угол, определяемый как профилем кулачка 18, так и установкой упора 11. От кулачка 25 через ролики 27 происходит поворот рычага 28, который через серьгу 30 перемещает сателлит 31 зубчатого механизма умножения 29. Поворот рычага 28 осуществляется по закону, заданному профилем кулачка 25. Сателлит 31, обегая по зубчатому сектору, передает вращение через зубчатый сектор 33 опоре 2. Требуемый закон перемещения схвата 17 определяется не только профилями кулачков 20 и 25, но и их взаимным расположением. 3 з.п. ф-лы, 5 ил.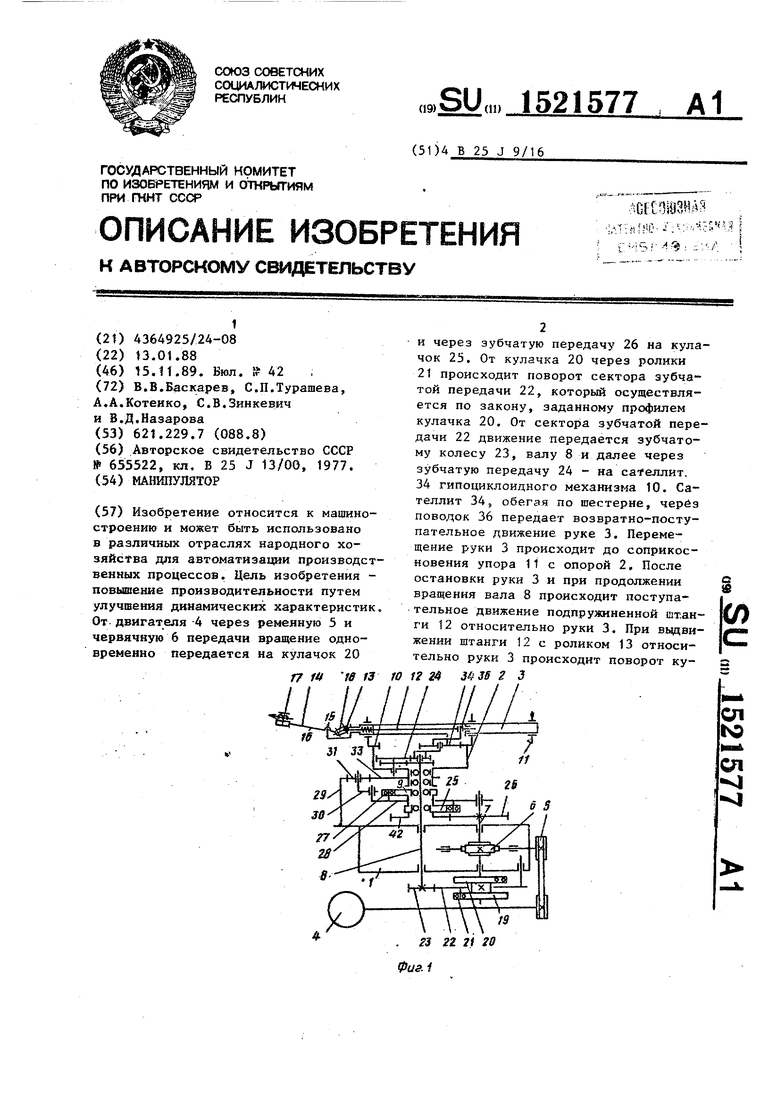
Изобретение относится к машиностроению и может быть использовано в различных отраслях народного хозяйст- ва для автоматизации производственных процессов.
Целью изобретения является повышение производительности путем улучшения динамических характеристик.
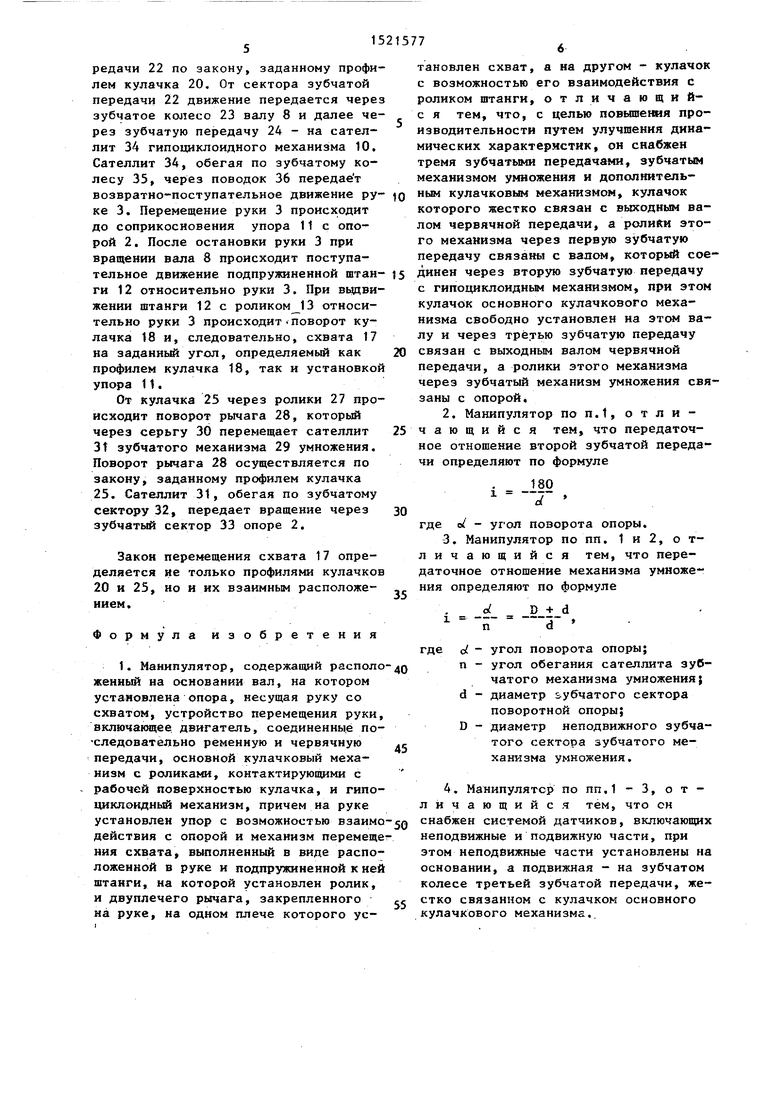
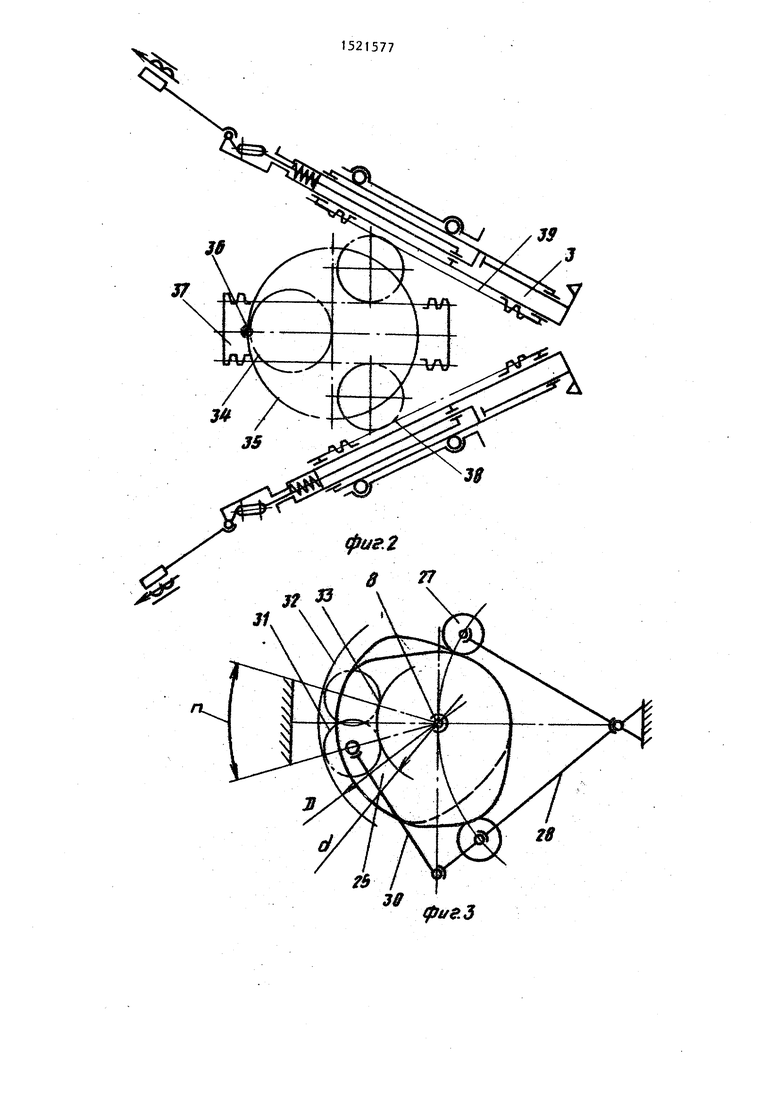
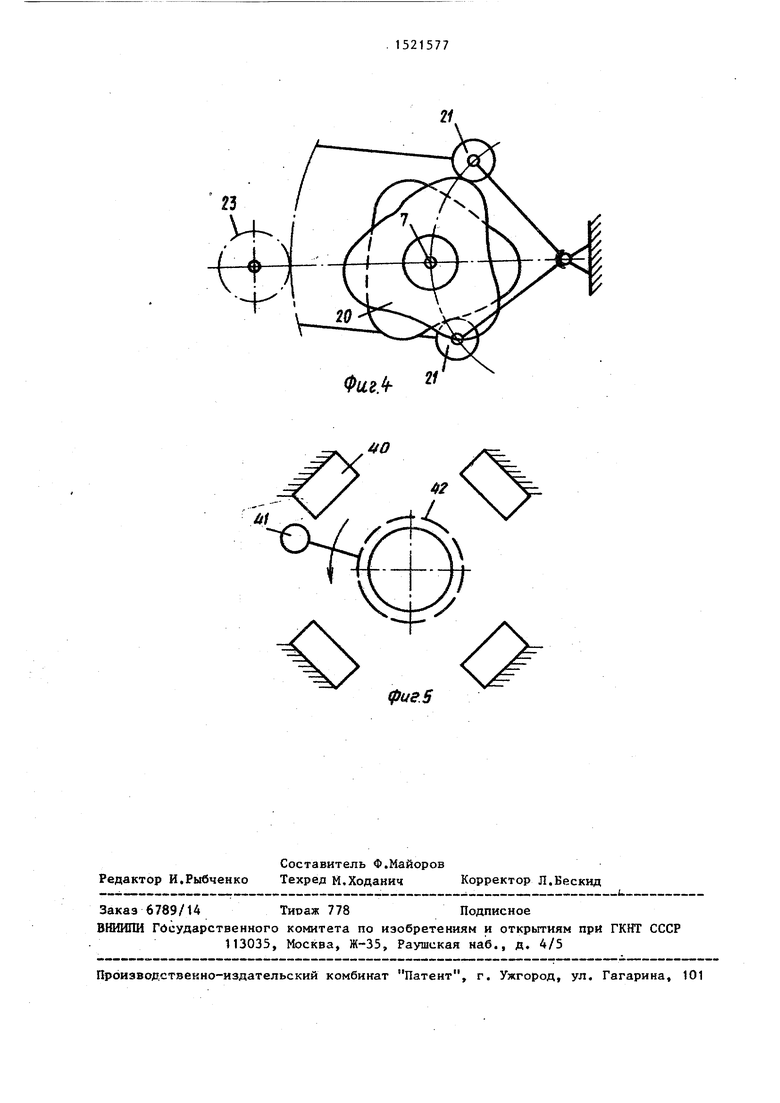
На фиг.1 изображена кинематическая схема манипулятора; на фиг. 2 - вариант выполнения двухруковрго манипулятора; на фиг. 3 - зубчатый механизм умножения} на фиг, 4 - дополни- тельный кулачковый механизм поступательного перемещения руки; на фиг.5 - схема взаимного расположения системы датчиков.
Манипулятор содержит установленную на основании 1 опору 2, в которой установлена рука 3, устройство перемещения руки, состоящее из последовательно кинематически соединенных с двигателем 4 ременной передачи 5 и червячной передачи 6, имеющей выходной вал 7, вал 8, на котором установлена опора 2, основной кулачковый механизм 9 поворота опоры 2 и гипоцик- лоидный механизм 10, причем в руке 3, несущей упор -11, установлена подпружиненная щтанга 12 с роликом 13 механизма 14 перемещения схвата, который содержит также смонтированный на прикрепленной к руке 3 опоре 15 двупле- чий рычаг 16, на одном конце которого закреплен схват 17, а на другом - кулачок 18, взаимодействуюащй с роликом 13 штанги 12. Манипулятор содержит также дополнительный кулачковый меха- низм 19 поступательного перемещения руки 3, кулачок 20 которого жестко связан с выходным валом 7 червячной передачи 6. Рабочий профиль кулачка
20кинематически связан через рол ики
21и первую зубчатую передачу 22 с валом 8, который жестко соединен с зубчатым колесом 23 этой передачи, при зтом вал 8 кинематически связан
через вторую зубчатую передачу 24 с гнпоциклоидньп механизмом 10. На валу 8 свободно установлен кулачок 25 основного кулачкового механизма 9 опоры 2. Кулачок 25 через третью зубчатую передачу 26 связан с валом червячной передачи. Рабочий профиль кулачка 25 кинематически связан через ролики 27 с рычагом 28, который, в свою очередь кинематическим связан через зубчатый механизм 29 умножения с опорой 2. Зубчатый механизм умножения включает серьгу 30, кинематически связанную с рычагом 28 и несущую сателлит 31, находящийся в зацеплении с неподвижным зубчатым сектором 32 и с зубчатым сектором 33 опоры 2.
Гипоциклоидный механизм 10 включает сателлит 34, находящийся в зацеплении с зубчатьм колесом 35 внутреннего зацепления. На сателлите 34 жестко закреплен поводок 36, кинематически связанный с подпружиненной Штангой 12 руки 3.
Возможно двухрукое исполнение манипулятора, который включает в себя двустороиннмо рейку 37, кинематически связанную с поводком 36 гипогщклоидно го механизма 10. Двусторонняя рейка 37 находится в зацеплении с двумя паразитными шестернями 38, которые, в свою очередь, находятся в зацеплении с рейками 39 рук 3.
На основании 1 закреплены неподвижные части 40 системы датчиков, при- этом подвижная часть 41 закреплена на зубчатом колесе 42 кулачка 25.
Манипулятор работает следующим об- .
От двигателя 4 через ремайную 5 и червячную 6 передачи вращение посредством выходного вала 7 одновременно передается на кулачак 20 и через зубчатую передачу 26 на кулачок .25,
От кулачка 20 через ролики 21 происходит поворот сектора зубчатой передачи 22 по закону, заданному профилем кулачка 20, От сектора зубчатой передачи 22 движение передается через зубчатое колесо 23 валу 8 и далее через зубчатую передачу 24 - на сателлит 34 гипоциклоидного механизма 10, Сателлит 34, обегая по зубчатому колесу 35, через поводок 36 передае т возвратно-поступательное движение руке 3. Перемещение руки 3 происходит до соприкосновения упора 11 с опорой 2. После остановки руки 3 при вращении вала 8 происходит поступа10
тановлен схват, а на другом - кулачок с возможностью его взаимодействия с роликом штанги, отличающий- с я тем, что, с целью повышегмя производительности путем улучшения дина мических характеристик, он снабжен тремя зубчатыми передачами, зубчатым механизмом умножения и дополнительным кулачковым механизмом, кулачок которого жестко связан с выходным валом червячной передачи, а ролики этого механизма через первую зубчатую передачу связаны с валом, который сое
тельное движение подпружиненной штан- 15 динен через вторую зубчатую передачу
ги 12 относительно руки 3. При выдвижении штанги 12 с роликом 13 относительно руки 3 происходит поворот кулачка 8 и, следовательно, схвата 17 на заданньй угол, определяемый как профилем кулачка 18, так и установкой упора 11.
От кулачка 25 через ролики 27 происходит поворот рычага 28, который через серьгу 30 перемещает сателлит ЗТ зубчатого механизма 29 умножения. Поворот рычага 28 осуществляется по закону, заданному профилем кулачка 25. Сателлит 31, обегая по зубчатому сектору 32, передает вращение через зубчатый сектор 33 опоре 2.
Закон перемещения схвата 17 определяется не только профилями кулачков 20 и 25, но и их взаимным расположением.
Формула изобретения
тановлен схват, а на другом - кулачок с возможностью его взаимодействия с роликом штанги, отличающий- с я тем, что, с целью повышегмя производительности путем улучшения дина мических характеристик, он снабжен тремя зубчатыми передачами, зубчатым механизмом умножения и дополнительным кулачковым механизмом, кулачок которого жестко связан с выходным валом червячной передачи, а ролики этого механизма через первую зубчатую передачу связаны с валом, который сое
с гипоциклоидным механизмом, при этом кулачок основного кулачкового механизма свободно установлен на этом валу и через третью зубчатую передачу связан с выходным валом червячной передачи, а ролики этого механизма через зубчатый механизм умножения связаны с опорой.
180
, Г
где 0 - угол поворота опоры.
о
1
П
d 1
где о - угол поворота опоры;
п - угол обегания сателлита зубчатого механизма умножения;
d - диаметр ьубчатого сектора поворотной опоры;
D - диаметр неподвижного зубчатого сектора зубчатого механизма умножения.
1521577
Of
t/e.3
ч0аг
фиг 5
| Манипулятор | 1977 |
|
SU655522A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
