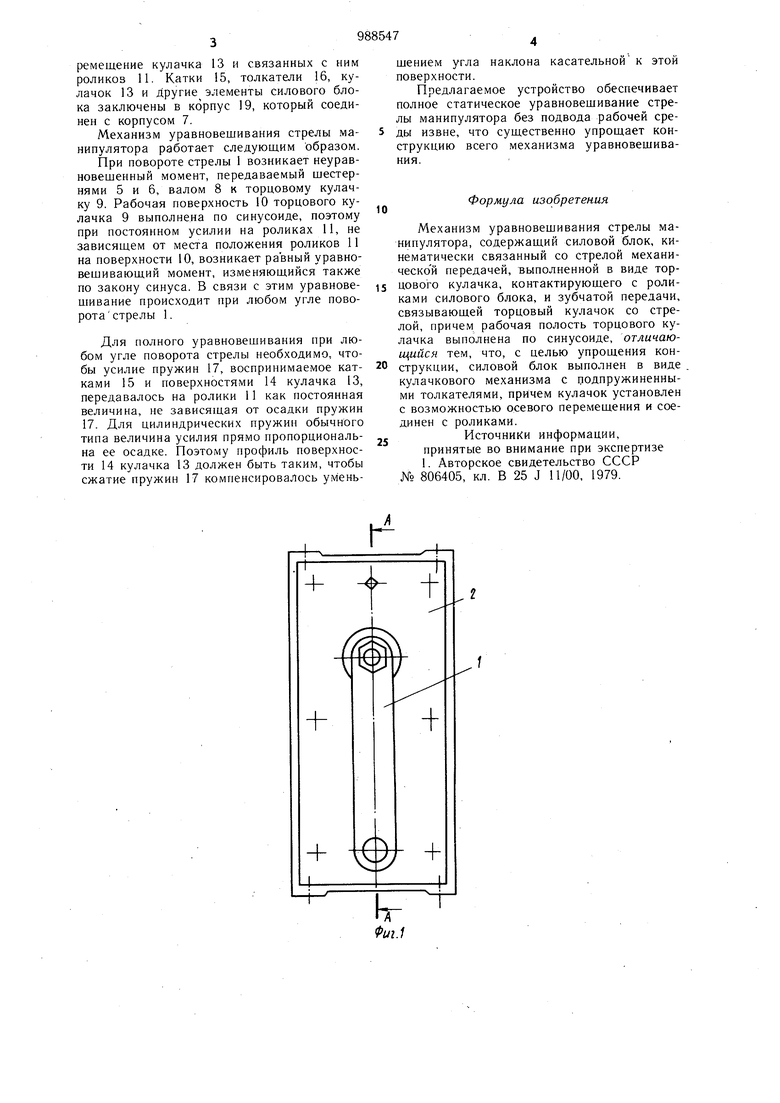
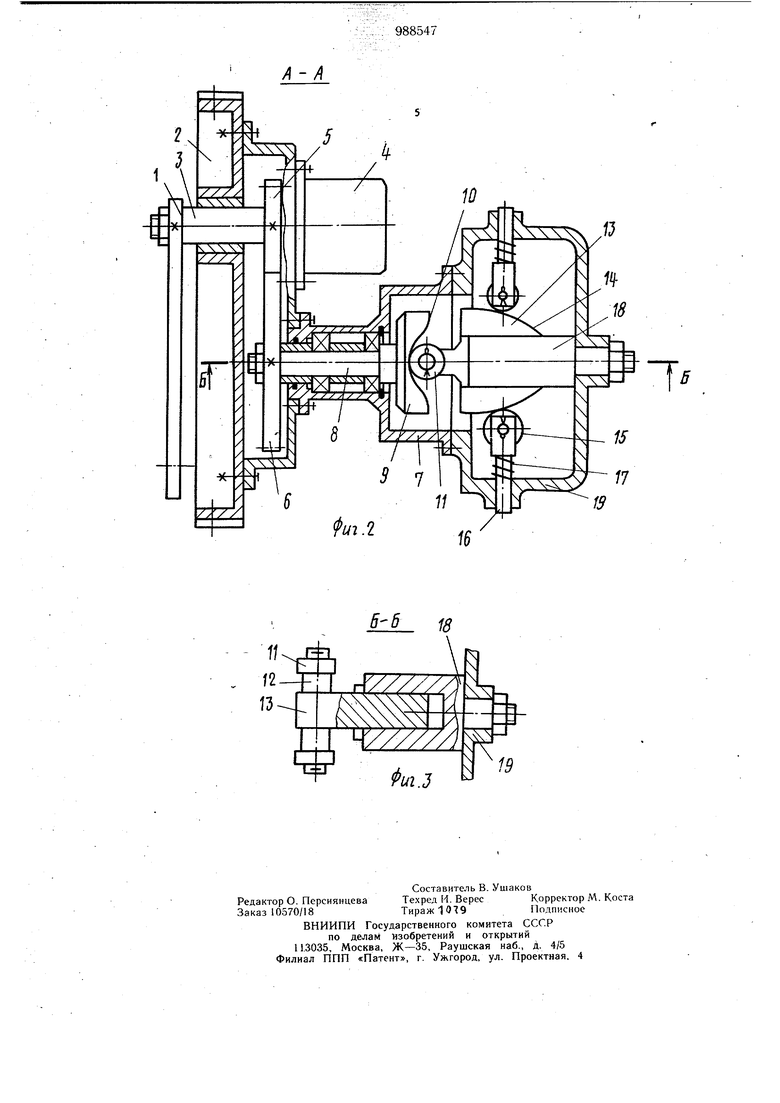
(54) МЕХАНИЗМ УРАВНОВЕШИВАНИЯ СТРЕЛЫ МАНИПУЛЯТОРА Изобретение относится к машиностроению и может быть использовано в манипуляторах и промышленных работах. Известен механизм уравновешивания стрелы манипулятора, содержащий силовой блок, кинематически связанный со стрелой механической передачей, выполненной в виде торцового кулачка, контактирующего с роликами силового блока, и зубчатой передачи, связывающей торцовый кулачок со стрелой, причем рабочая поверхность торцового кулачка выполнена по синусоиде 1. Недостатком известного устройства является наличие силового цилиндра и в связи с этим подвод рабочей среды к этому цилиндру, что существенно усложняет конструкцию механизма уравновешивания. Целью изобретения является упрощение конструкции. Эта цель достигается тем, что силовой блок механизма уравновешивания выполнен в виде кулачкового механизма с подпружиненными толкателями, причем кулачок установлен с возможностью осевого перемещения и соединен с роликами. На фиг. 1 изображен механизм уравновешивания стрелы манипулятора, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2. Механизм уравновешивания стрелы манипулятора содержит стрелу 1, установленную в корпусе 2 на валу 3. Приводной двигатель 4 и шестерня 5 также установлены на валу 3. С ихестерней 5 находится в зацеплении шестерня 6, число зубьев которой в данном случае выбрано в два раза большим, чем шестерня 5. В корпусе 7 расположен вал 8, одним концом связанный с шестерней 6, а другим - с торцовым кулачком 9, рабочая поверхность 10 которого является синусоидной. Число полуволн синусоиды равно произведению передаточного числа шестерен 5 и 6 на число роликов 11, взаимодействующих с поверхностью 10. Ролики 11 расположены на оси 12, которая установлена на кулачке 13, выполненном в виде пластины с рабочими поверхностями 14. С поверхностями 14 кулачка 13 взаимодействуют катки 15 толкателей 16. Пружины 17 обеспечивают необходимое для уравновешивания стрелы 1 усилие, прижимая катки 15 к поверхности 14 кулачка 13. Кулачок 13 расположен в пазу направляющей 18, обеспечивающей только осевое перемещение кулачка 13 и связанных с ним роликов 11. Катки 15, толкатели 16, кулачок 13 и другие элементы силового блока заключены в корпус 19, который соединен с корпусом 7.
Механизм уравновешивания стрелы манипулятора работает следующим образом.
При повороте стрелы 1 возникает неуравновешенный момент, передаваемый шестернями 5 и 6, валом 8 к торцовому кулачку 9. Рабочая поверхность 10 торцового кулачка 9 выполнена по синусоиде, поэтому при постоянном усилии на роликах 11, не зависящем от места положения роликов 11 на поверхности 10, возникает равный уравновешивающий момент, изменяющийся также по закону синуса. В связи с этим уравновешивание происходит при любом угле поворотастрелы 1.
Для полного уравновешивания при любом угле поворота стрелы необходимо, чтобы усилие пружин 17, воспринимаемое катками 15 и поверхностями 14 кулачка 13, передавалось на ролики 11 как постоянная величина, не зависящая от осадки пружин 17. Для цилиндрических пружин обычного типа величина усилия прямо пропорциональна ее осадке. Поэтому профиль поверхности 14 кулачка 13 должен быть таким, чтобы сжатие пружин 17 компенсировалось у.мень+
щением угла наклона касательной к этой поверхности.
Предлагаемое устройство обеспечивает полное статическое уравновешивание стрелы манипулятора без подвода рабочей среды извне, что существенно упрощает конструкцию всего механизма уравновешивания.
Формула изобретения
Механизм уравновешивания стрелы манипулятора, содержащий силовой блок, кинематически связанный со стрелой механической передачей, выполненной в виде торцового кулачка, контактирующего с роликами силового блока, и зубчатой передачи, связывающей торцовый кулачок со стрелой, причем рабочая полость торцового кулачка выполнена по синусоиде, отличающийся тем, что, с целью упрощения конструкции, силовой блок выполнен в виде кулачкового механизма с подпружиненными толкателями, причем кулачок установлен с возможностью осевого перемещения и соединен с роликами.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 806405, кл. В 25 J 11/00, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм уравновешивания стрелы манипулятора | 1981 |
|
SU982897A2 |
| Механизм уравновешивания стрелыМАНипуляТОРА | 1979 |
|
SU806405A1 |
| Механизм уравновешивания стрелы манипулятора | 1983 |
|
SU1090547A2 |
| Механизм уравновешивания стрелы манипулятора | 1980 |
|
SU952579A2 |
| Манипулятор | 1986 |
|
SU1421527A1 |
| ЗАПОРНОЕ УСТРОЙСТВО | 1973 |
|
SU404984A1 |
| Устройство управления механизмом подачи топлива и фрикционным многодисковым вариатором транспортного средства | 1987 |
|
SU1449379A1 |
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Двухбарабанная лебедка | 1977 |
|
SU980609A4 |
| Манипулятор | 1984 |
|
SU1284822A1 |
-н
+
А-А
