О СО
о
СД Изобретение относится к манипуляторам для механизации подъемно-транспортных операций, а более конкретнее к механизмам уравновешивания исполнительных органов манипуляторов. По основному авт. св. № 806405 известен механизм уравновешивания стрелы манипулятора, содержаший упругий элемент, кинематически связанный со стрелой через механическую передачу, силовой цилиндр, на штоке которого шарнирно установлены ролики, причем механическая передача содержит торцовой кулачок, контактируюцдий с роликами, и зубчатую передачу, связывающую кулачок со стрелой, при этом рабочая поверхность кулачка выполнена по синусоиде, а число полуволн синусоиды равно произведению передаточного числа зубчатой передачи на число роликов. Известный механизм обеспечивает уравновешивание стрелы в узком диапазоне ее углов поворота и только при постоянной нагрузке на стреле. Возможна также разгрузка приводного двигателя при возрастании нагрузки на стреле путем повышения давления в силовом цилиндре. При этом давление должно возрастать прямо пропорционально росту нагрузки 1. Однако этот механизм не имеет устройства, обеспечивающего автоматическую регулировку давления в силовом цилиндре, что не дает возможность уравновесить стрелу при изменении нагрузки. Целью изобретения является автоматическое поддержание полного уравновешенного состояния независимо от величины, действующей на стрелу нагрузки, и тем самым повыщение надежности динамического уравновещивания. Цель достигается тем, что механизм уравновешивания снабжен регулятором давления рабочей среды в силовом цилиндре, блоком определения величины крутящего момента, выполненным в виде размещенных на опорах приводного двигателя пар тензометрических датчиков, блоком сравнения сигналов этих датчиков и усилителем, электрически связанным с блоком сравнения и с регулятором давления. На фиг. 1 показана конструкция, обший вид; на фиг. 2 - разрез А-А на фиг. 1. Механизм уравновешивания стрелы 1 манипулятора, расположенный на валу 2, содержит шестерню 3 и приводной двигатель 4. С шестерней 3 находится в зацеплении шестерня 5, образующая с ней передачу с передаточным числом, равным двум. Перечисленные составные части размещены в корпусе 6. Шестерня 5 расположена на валу 7, на котором укреплен также кулачок 8, торцовая поверхность 9 которого выполнена синусоидальной. С поверхностью 9 контактируют ролики 10, размещенные на поршне 11 силового цилиндра, содержащего корпус 12 и крышку 13, снабженную штоком 14 с шлицевым соединением для предотвращения проворота поршня 11 при работе. Двигатель 4 укреплен на четырех опоpax 15. На каждой из опор размещены (например, путем приклеивания) два тензометрических датчика, причем направление их деформации совпадает с направлением нормальных напряжений, появляющихся в опорах при их изгибе от момента на двигателе 4, возникающего при догрузке или разгрузке стрелы 1. Тензодатчики 16 и 17, 18 и 19, 20 и 21, 22 и 23 расположены соответственно на верхней, правой, нижней и левой опорах 15. Каждый тензодатчик парой проводов связан с блоком сравнения сигналов 24, задача которого - выработать сигнал нужной полярности и величины, пропорциональной напряжению изгиба опор 15, которое в свою очередь, прямо пропорционально реактивному моменту двигателя 4. Блок сравнения 24 электрически связан с усилителем 25 и, далее, линией связи 26 с регулятором давления 27, который трубопроводом 28 соединен с силовым цилиндром. Механизм уравновешивания работает следующим образом. При изменении нагрузки на стреле 1 изменяется и потребный крутящий момент, необходимый для уравновешивания этой нагрузки. При этом появляется изгибающий момент на опорах 15, сопровождающийся деформацией пары тензодатчиков, один из которых растянут, а другой - сжат. Блок сравнения 24 на основании показаний пар тензодатчиков 16 и 17, 18 и 19, 20 и 21, 22 и 23 вырабатывает сигнал соответствующей величины и полярности, который проходит через усилитель 25 и поступает к приводу регулятора давления 27, управляющего подачей рабочей среды к силовому цилиндру. Благодаря этому давление роликов 10 на кулачок 8 изменяется, что приводит к изменению уравновещивающего момента пропорционально изменению рабочего момента на стреле. Устройство позволяет автоматически поддержать уравновешенное состояние при изменении нагрузки на стреле и таким способом уменьшить мощность приводного двигателя.
15
7
фт..
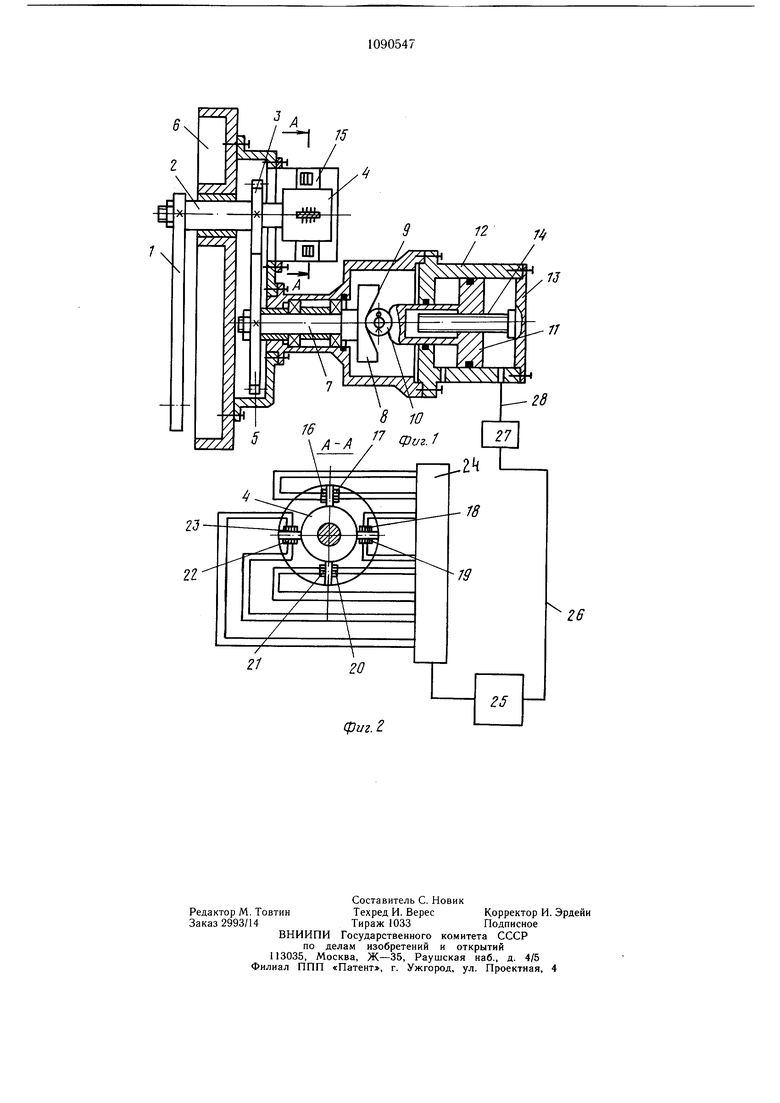
МЕХАНИЗ/Ц УРАВНОВЕШИВАНИЯ СТРЕЛЫ МАНИПУЛЯТОРА по авт. св. JMg 806405, отличающийся тем, что, с целью повышения падежностп путем автоматизации динамического уравновешивапия, он снабжен регулятором давления рабочей среды в силовом цилиндре, смонтированными на опорах приводного вала двигателя парами тензометрических датчиков, блоком сравнения сигналов этих датчиков и усилителем, электрически связанным с блоком сравнения и с регулятором давления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм уравновешивания стрелыМАНипуляТОРА | 1979 |
|
SU806405A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
