Изобретение относится к манипуляTopciM для механизации технологических процессов, а именно к механизмам уравновешивания стрелы манипулятора .
По основному авт.св. 806405 известен механизм уравновешивания стрелы манипулятора, который содержит приводной двигатель и силовой цилиндр для статического уравновешивания стрелы, на штоке которого шарнирно установлены ролики, а механическая передача содержит торцевой кулачок, контактирующий с роликами, а также зубчатую передачу, связывающую кулачок со стрелой. Рабочая поверхность кулачка выполнена по синусоиде 1.
Однако функционсшьные возможности известного механизма ограничены, так как он обеспечивает только ста.тическое уравновешивание стрелы, для работы которой необходим приводной двигатель.
Цель изобретения -. расширение функциональных возможностей устройства за счет совмещения процессов уравновешивания стрелы с приводом ее поворота.
Для достижения поставленной цели механизм уравновешивания стрелы манипулятора снабжен дополнительными силовыми цилиндрами с роликами на их штоках, контактирующими с синусоидальной поверхностью кулачка..
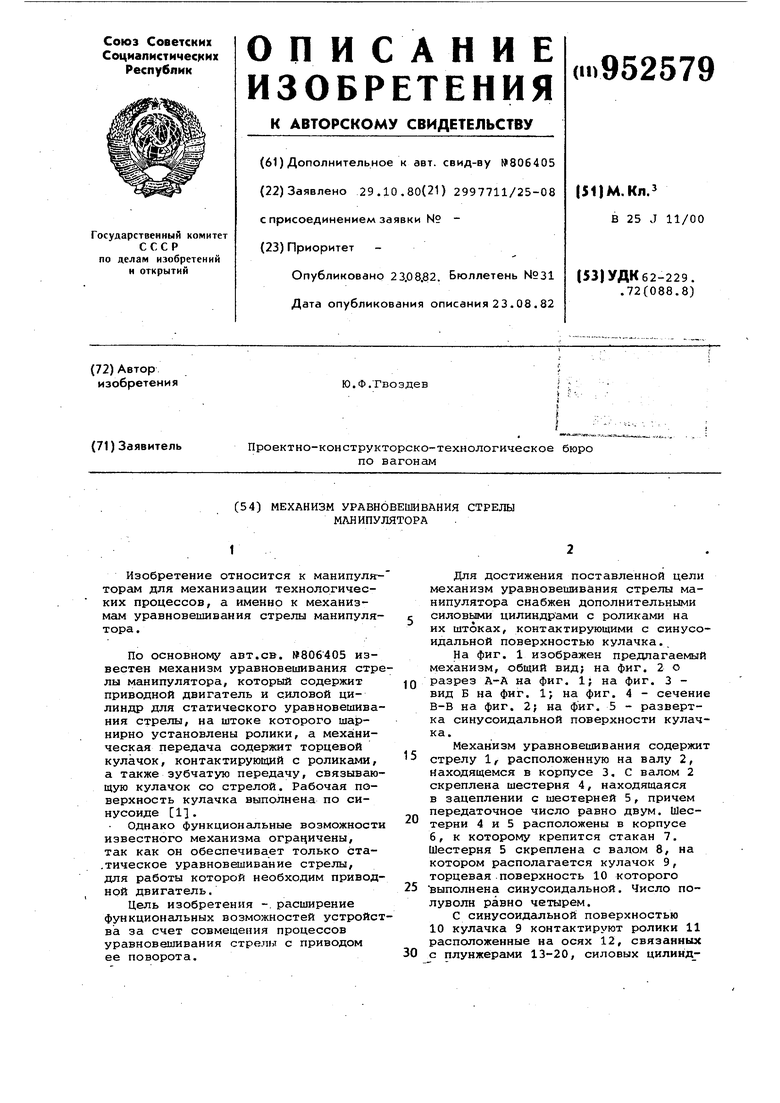
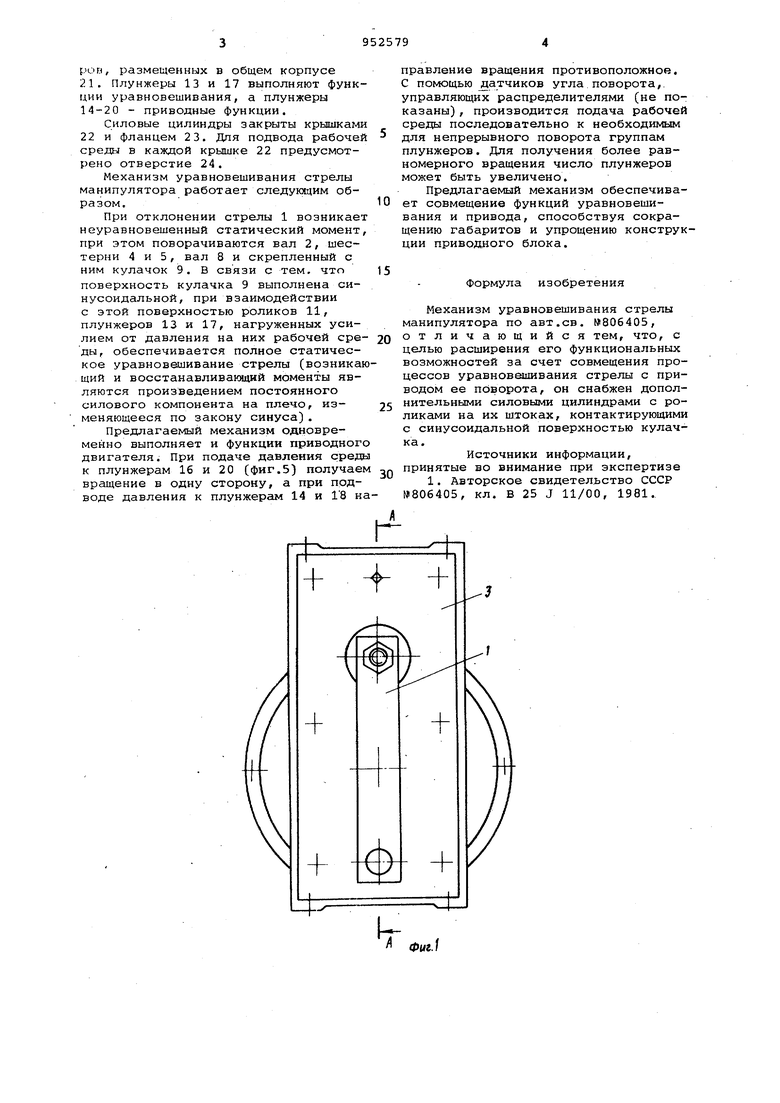
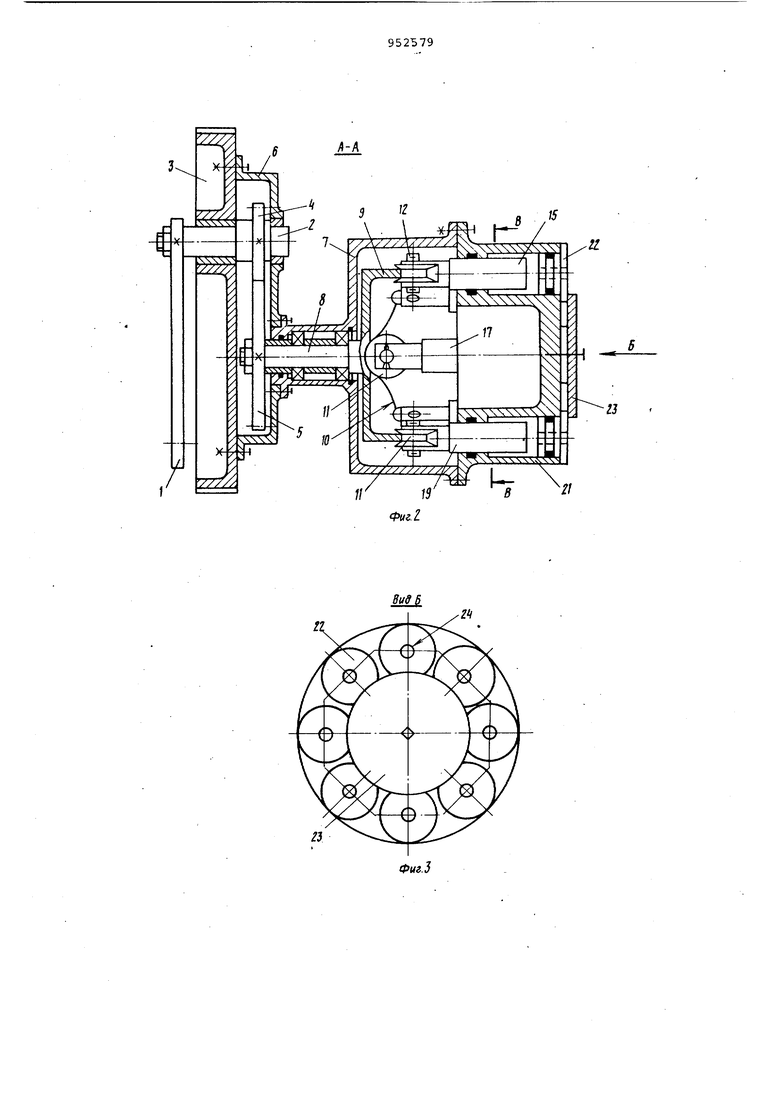
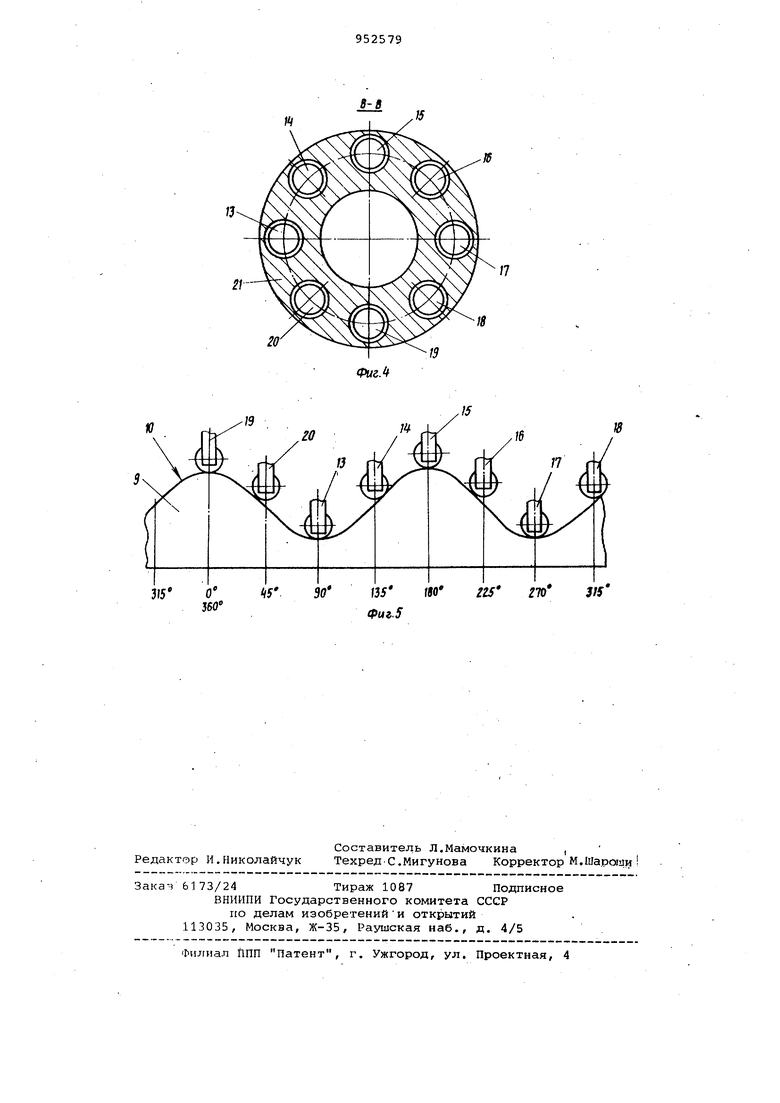
На фиг. 1 изображен предлагаемый механизм, общий вид; на фиг. 2 О разрез А-А на фиг. 1; на фиг. 3 10вид Б на фиг. 1 на фиг. 4 - сечение В-В на фиг. 2; на фит. 5 - развертка синусоидальной поверхности кулачка.
Механизм уравновешивания содержит
15 стрелу If расположенную на валу 2, Находящемся в корпусе 3. С валом 2 скреплена шестерня 4, находящаяся в зацеплении с шестерней 5, причем передаточное число равно двум. Шес20терни 4 и 5 расположены в корпусе 6, к которому крепится стакан 7. Шестерня 5 скреплена с валом 8, на котором располагается кулачок 9, торцевая .поверхность 10 которого
25 выполнена синусоидальной. Число полуволн равно четырем.
С синусоидальной поверхностью 10 кулачка 9 контактируют ролики 11 расположенные на осях 12, связанных
30 с плунжерами 13-20, силовых цилиндJpon, размещенных в общем корпусе 21. Плунжеры 13 и 17 выполняют функции уравновешивания, а плунжеры 14-20 - приводные функции.
Силовые цилиндры закрыты крышками 22 и фланцем 23. Для подвода рабочей среды в каждой крышке 22 предусмотрено отверстие 24.
Механизм уравновешивания стрелы манипулятора работает следующим образом.
При отклонении стрелы 1 возникает неуравновешенный статический момент, при этом поворачиваются вал 2, шестерни 4 и 5, вал 8 и скрепленный с ним кулачок 9. В связи с тем. что поверхность кулачка 9 выполнена синусоидальной, при взаимодействии с этой поверхностью роликов 11, плунжеров 13 и 17, нагруженных усилием от давления на них рабочей ереды, обеспечивается полное статическое уравновешивание стрелы (возникающий и восстанавливающий моменты являются произведением постоянного силового компонента на плечо, изменяющееся по закону синуса).
Предлагаемый механизм одновременно выполняет и функции приводного двигателя. При подаче давления среды к плунжерам 16 и 20 (фиг.5) получаем вращение в одну сторону, а при подводе давления к плунжерам 14 и 18 направление вращения противоположное. С помощью датчиков угла поворота,, управляющих распределителями (не показаны) , производится подача рабочей среды последовательно к необходимым для непрерывного поворота группам плунжеров. Для получения более равномерного вращения число плунжеров может быть увеличено.
Предлагаемый механизм обеспечивает совмещение функций уравновешивания и привода, способствуя сокращению габаритов и упрощению конструкции приводного блока.
Формула изобретения
Механизм уравновешивания стрелы манипулятора по авт.св. №806405, отличающийся тем, что, с целью расширения его функциональных возможностей за счет совмещения процессов уравновешивания стрелы с приводом ее поворота, он снабжен дополнительными силовыми цилиндрами с роликами на их штоках, контактирующими с синусоидальной поверхностью кулачка.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №806405, кл. В 25 J 11/00, 1981.
7
+
+
+
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм уравновешивания стрелыМАНипуляТОРА | 1979 |
|
SU806405A1 |
| Механизм уравновешивания стрелы манипулятора | 1981 |
|
SU982897A2 |
| Механизм уравновешивания стрелы манипулятора | 1983 |
|
SU1090547A2 |
| Механизм уравновешивания стрелы манипулятора | 1981 |
|
SU988547A1 |
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| Манипулятор | 1984 |
|
SU1296400A1 |
| Намоточное устройство | 1981 |
|
SU1034810A2 |
| Люнет для круглошлифовальных станков | 1987 |
|
SU1567349A1 |
| Передвижной подъемник | 1976 |
|
SU602469A1 |
| Автомат для навивки пружин | 1980 |
|
SU895576A1 |
+ -О- +
Фиг./
20 iis эо f35 т вп 315 О
W
W Фиг. 5 zzs гто зи
