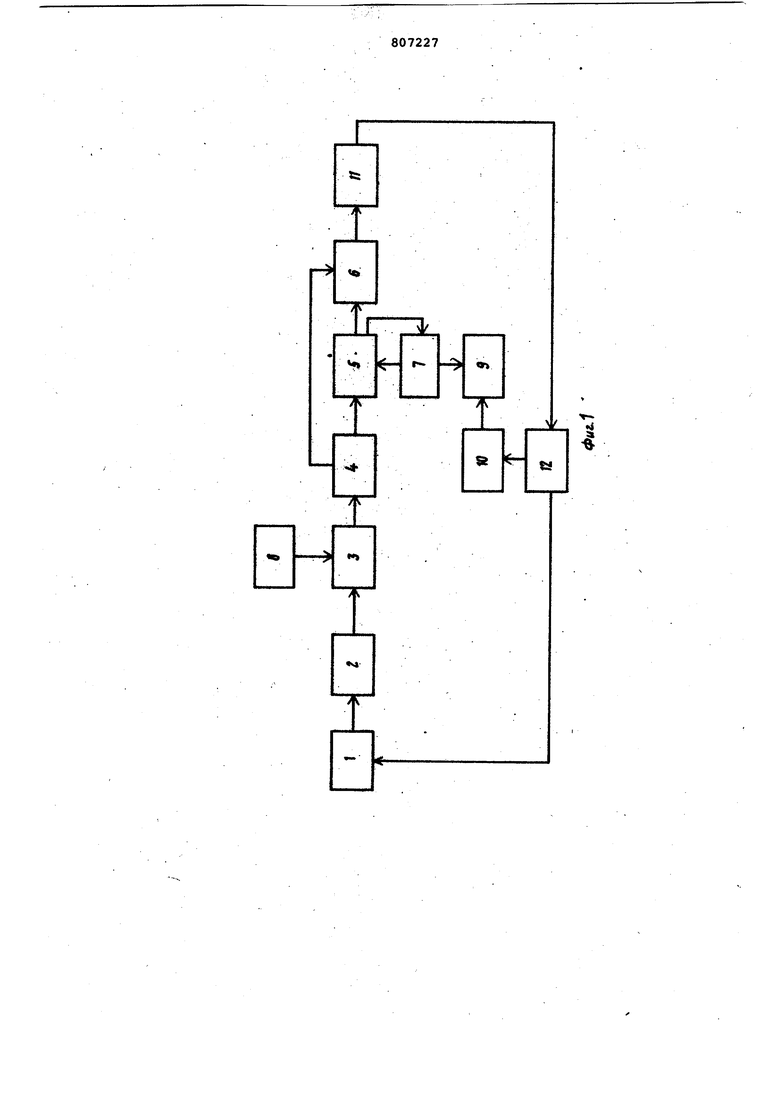
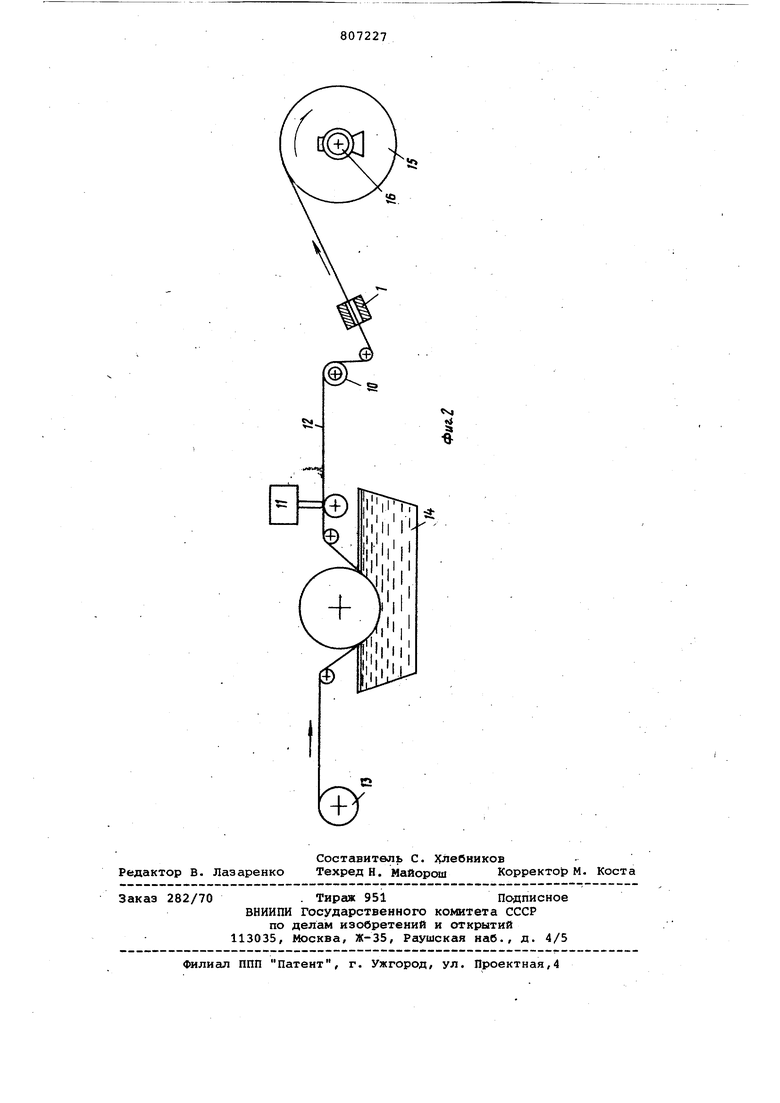
ным регулятором 3, на выходе которо го находится индикатор 4 знака изме нения параметра, соединенный с широтно-импульсным модулятором 5, на выходе которого установлен управляе мый усилитель-инвертор б, связанный с индикатором 4 знака, генератор 7 пилообразного напряжения, программны задатчик 8, соединенный с двухпозиционным регулятором 3, индикатор 9 начала измерения, датчик 10 линейных перемещений регулируемого объекта пропитанной ленты, исполнительный орган 11, связанный с объек том регулирования лентой 12, подава .мой с катушки 13 в ванну 14. Лента 12 .через датчик 1 регулируемого параметра связана с изделием 15, приводимым во вращение приводом 16. Устройство работает следу 0{1и1М образом. Импульсы с датчика 10 линейных перемещений (расстояние между импул сами пропорционально определенной длине ленты) поступают на индикатор 9 начала измерений (в общем случае это делитель частоты, коэффициент деления которого зависит от расстоя ния между исполнительным органом и датчиком). С индикатора 9 импульс команды начало измерения запускае генератор 7 пилообразного напряжения и напряжение с генератора 7 пос пает на широтно-импульсный модулятор 5, на другой вход которого пода ется напряжение рассогласования с заданием. В зависимости от знака изменения регулируемого параметра, определяемого индикатором 4 знака, с усилителя-инвертора б снимается сигнал управления на исполнительный орган 11, который начинает отработк сигнала рассогласования. В момент равенства напряжения ттяа и сигнала рассогласования в широтно-ймпульсно модуляторе 5 заканчивается формирование -импульса отработки. На выходе усилителя-инвертора б напряжение становится равным нулю и исполнительный Орган заканчивает отра ботку. Одновременно сигнал с широтно-импульсного модулятора 5 пода ется в генератор 7 и линейно возрас тающее напряжение .прекращается. .В момент подхода участка регулируемого объекта, где было начало воздействия исполнительного органа 11 с индикатора 9 на вход генератора 7 поступает нмпульс начало из мерения и цикл повторяется. На выходе усилителя-инвертора б формируется сигнал управления исполнительным органом, длительность которого пропорциональна .отклонению регулируемого параметра от задания. В результате исполнительный орган 11 бу дет работать только то время, ко.торбе требуется для отработки рассОгласования, что обеспечивает умен шение амплитуды и частоты колебаний регулируемого параметра. Лента 12 сматывается с катушки 13 и пропитывается связующим в ванне 14, исполнительный орган 11 производит отжатие из ленты лишнего связывающего, далее лента приводит . в движение датчик 10 линейных перемещений ленты, и через датчик 1 содержания связывающего наматывается на вращающееся от привода 16 изделие 15. Все указанные на чертеже 2 позиции (кроме 15 и 16) расположены на подвижном нитетракте, который для выполнения намотки сложных а1зделий передвигается вдоль изделия и от изделия по программе намотки. Таким образом, пpejDtлaгaeмoe устройство может быть использовано в ткацкой промышленности при окраске материалов, при прокате металлов в металлургической промьшшенности, в машиностроении, в промышленности, где производится смешивание в трубопроводе двух и более веществ, а также при нагревании вешеств, обладающих большим временем распространения тепла от .нагревателя до датчика температурил. Формула изобретения Устройство для управления технологическими параметрами движущихся объектов, например налюткой пропитанной ленты, содержащее датчик количества пропиточного вещества в ленте, подключенный к первому входу двухпозиционного регулятора, второй вход которого соединен с программным э датчикс,. а выход со входом индикатора знака, и исполнительный орган, отличающееся тем, что, с целью повышения точности устройства, оно содержит включенные последоватепьио датчик перемещения пропитанной ленты, индикатор начета измерений и генератор пилообразного напряжения, широтно-импульсный ккщулятор и управляемый усилитель-инвертор, выход которого подключен ко входу исполнительного органа, а входы к выходам индикатора знака непосредственно и через широтно-импульсный кюдулятор, другие вход и выход которого соединены соответственно с выходом и другим входом генератора пилообраз но го н апряже ния. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 236599, кл. G 05 В 13/02, 1967. 2.Авторское свидетельство СССР 318916, кл. G 05 В 19/32, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| Устройство для регулирования технологических параметров | 1980 |
|
SU959046A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Устройство для стабилизации вакуума | 1983 |
|
SU1149060A1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| Регулятор температуры | 1979 |
|
SU842745A1 |
| Устройство для автоматической центрировки линз | 1982 |
|
SU1118882A1 |
| Устройство для управления процессом бурения | 1989 |
|
SU1647126A1 |
| Устройство для управления и защиты преобразователя | 1985 |
|
SU1336171A1 |
| Импульсный регулятор | 1983 |
|
SU1117585A1 |