1
Изобретение относится к автоматическому управлению, а именно к способс1М двухкоординатного программного управления, и может быть использовано в системах программного управления координатного перемещения исполнительных органов стаков.
Известны способы двухкоординатного программного управления 1 .
Недостатком известных является невысокая точность управления, так как сигнал программного управления не корректируется в зависимости от величины текущего отклонения от программной траектории.
Наиболее близким по технической сущности является способ двухкоординатного программного управления.
В этом способе циклически измеряют сигнгипы координатного рассогласования и формируют сигнал коррекции, пропорциональный координатному отклонению от программной траектории , которым корректируют сигнгшы координатного рассогласования 1 .
Недостатком этого способа является то, что при воспроизведении программных траекторий, лежащих на границах полуквадратов рабочего
поля, имеккт место значителы ые сшшбки. Эти ошибки обусловлены погрешностями, BHOCKKKiDoc элементами устройства, реализующего данный способ, на траекториях движения, лежащих на.границах полуквадратов, корректирукхций сигнал и сигналы координатного рассогласования могут несогласовываться, что приводит к непра0вильной коррекции и значительным сшибкам.
Цель изобретения - повыиение точности управления.
Поставленная цель достигается
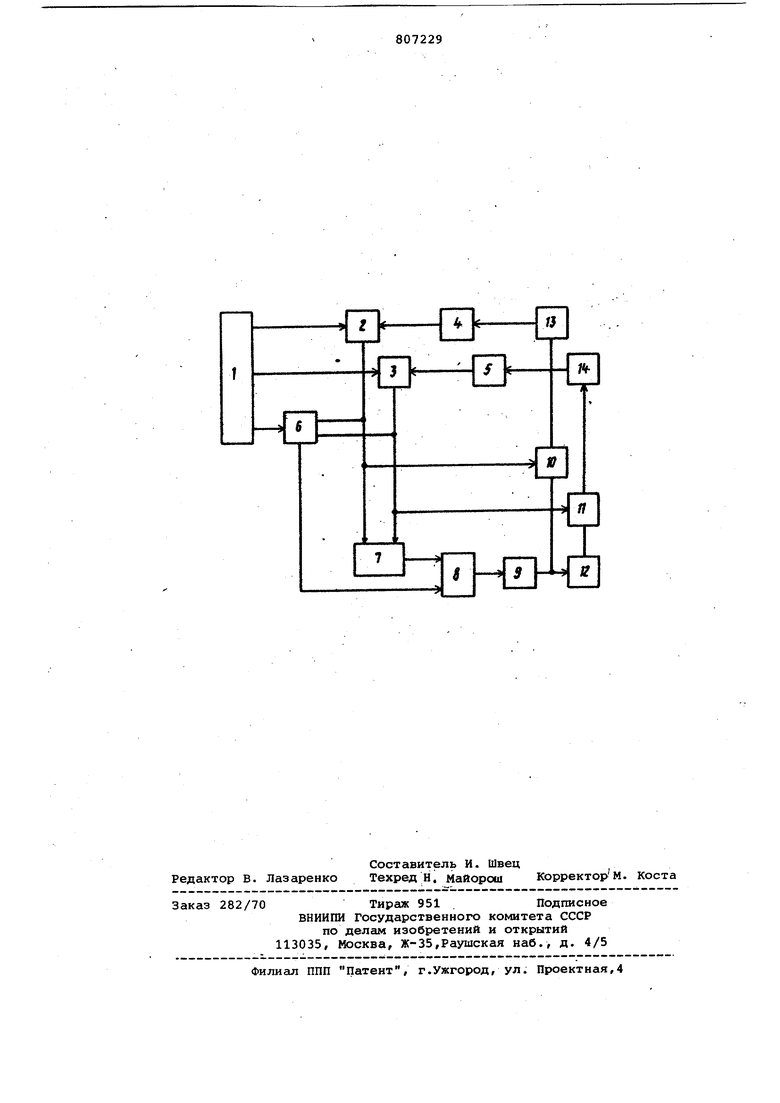
5 тем, что в способе двухкоординатного программного управления, основанном . на измерении сигналов координатного рассогласования и формировании сигнала коррекции, пропорционально0го координатному отклонению от програквишой траектории, сигналы координатного рассогласования сравнивают между собой и формируют сигнал, пропорционсшьный разности сигналов ко5ординатного рассогласования, который ; умножают на сигнал коррекции, полученный сигнсш интегрируют и один из измеренных сигналов координатного рассогласования модулируют полу0ченным после интегрирования сигналом. а другой из измеренных сигналов коор динатного рассогласования глодулирую проинвертированным после интегриров ния сигналом. На.чертеже приведена схема двухкоординатной системы программного управления. Система содержит блок 1 программного управления, изллерители 2 и 3 коорд11натного рассогласования,датчики 4 и 5 координат, формирователь 6 сигнала коррекции, устройство 7 сравнения, устройство 8 умножения, интегратор 9, модуляторы 10 и 11, инвертор 12, координатные приво ды 13 и 14.. Система работает следуквдим образом. Сигналы, пропорциональные программным значениям координат Xj и Yj с выходов блока 1 программного управления поступают на первые входы измерителей 2 и 3 координатного рассогласования, на вторые входы которых поступают выходные сигнеипы датчиков 4 и 5 координат, пропорцио Нсшьные действительным координатам Хд, Y.,Измерители 2 и 3 координатного согласования циклически вырабатывают сигналы рассогласова- Y - П1 Vi ния X, Сигналы и поступают на входы формирователя б, на другой вход которого с выхода блока 1 про.граммного управления поступает сигнал, про порциональный коэффициенту наклона програг виной траектории, и формирователь 6 форьшрует сигнал коррекции Z- - , пропорциональный коорд натному отклонению от программной траектории. Кроме того сигналы коор динатного рассогласования У .гтЬступают на входы устройства 7 сра нения, которюе вырабатывает сигнал, пропорциональный их разности V X,j Устройство 8 умножения умножает сигналы Z и , и результирующий сигнал поступает на вход интегратора 9, выходной сигнал которого пост пает на вход модулятора 10 и через инвертор 12 на вход модулятора 11. На йторые входы модуляторов 10 и 1 поступают сигналы координатного рассогласования X,j и У , которые ди.фферендиально модулируются выход ным сигналом интегратора 9, и посту на входы координатных приводо IS и 14. Координатные приводы 13 и 14 в течении Данного цикла отрабаты-i вают модулированные сигналы рассогласования. В последукидих циклах система работает аналогичным образом. Так как сигналы координатного рассогласования X и У; дифференциально модулируются сигналом, пропорциональным интегралу произведения сиг- i налов 2 и , то корректирующий сигнал и сигналы координатного рассогласования правильно согласуются на любых программных траекториях независимо от погрешностей, вносимыми элементами системы, таким образом программные траектории любого угла наклона отрабатываются с высокой точностью. При реализации известного способа ошибка в воспроизведении линейных траекторий под углами наклона кратными 45° и близкими к ним составляла 0,3 мм,,- При управлении по предлагаемому способу точность повышается более чем на порядок. Формула изобретения Способ двухкоординатного программного управления, основанный на измерении сигналов координатного рассогласования и формировании сигнала коррекции, пропорционального координатному отклонению от программной траектории, отличающийся тем, что, с целью повышения точности, сигналы координатного рассогласования сравнивают между собой и формируют сигнал, пропорциональный разности сигналов координатного рассогласования-, который умножгцот на сигнал коррекции, полученный сигнал интегрируют и один иЭ измеренных сигналов координатного рассогласования модулируют полученным после интегрирования сигналом, а другой из измеренных сигналов координатного рассогласования модулируют проинвертированным после интегрирювания СИГНёШОМ. Источники информации, принятые во внимание при экспертизе 1. Патент США 3622766, кл. 235-151-11, опублик. 1971. 2. Авторское свидетельство СССР 448436, кл. G 05 В 19/38, опублик. 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Система для двухкоординатного позиционирования | 1984 |
|
SU1249484A1 |
| СПОСОБ ПРОГРАММНОГО УПРАВЛЕНИЯ ШАГОВЫМ ПЕРЕМЕЩЕНИЕМ ПОСРЕДСТВОМ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
SU1795861A1 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| Измерительная головка | 1986 |
|
SU1409866A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| Способ считывания графическойиНфОРМАции и уСТРОйСТВО для ЕгООСущЕСТВлЕНия | 1979 |
|
SU802978A1 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2006 |
|
RU2326325C1 |
| Адаптивное устройство для программногоупРАВлЕНия CTAHKOM | 1979 |
|
SU830313A1 |