f
Изобретение относится к области автоматического управления и может быть использовано в программных системах двухкоординатного позиционирования.
Целью изобретения является упрощение конструкции при одновременном обеспечении перемещения в заданном .направлении с начального момента процесса позиционирования.
На фиг.1 представлена блок-схема двухкоординатной системы позиционирования на фиг.2 - устройство управления; на фиг.З - А - временные диаграммы работы системы.
Система содержит блок I ввода nporpaNMb ; устройство 2 управления 5 комь таторы 3 и ft, координатные приводы 5 к 6 J датчики положения 7 и 8, блок 9 коррекции, коммутатор 10, логический блок 11, регуляторы 12 и 13 положения с изменяемым уровнем ограничения.
Блок 1 ввода программы предназначен для задания конечных координат позиционирования в цифровой форме согласно заданной программе ,и выдаче сигнала об окончании позиционирования. В качестве блока ввода могут быть использованы микропроцессор, ЦВМ или пульт ручного управления, например контроллер.
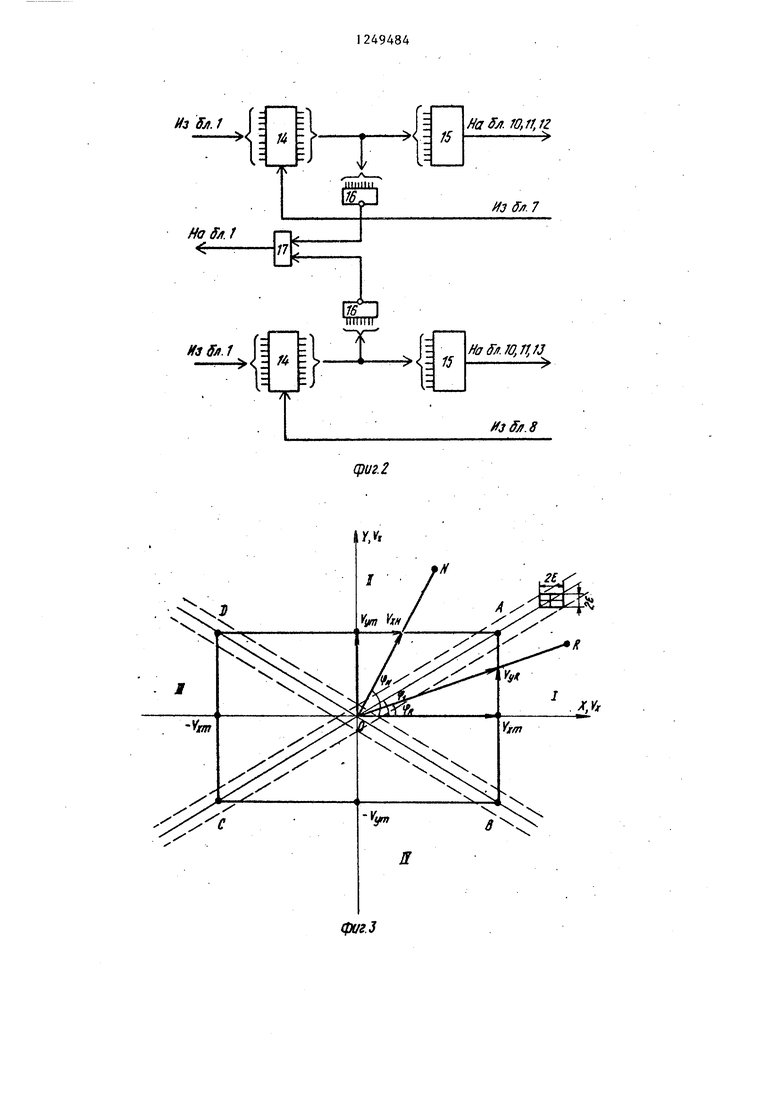
Устройство 2 управления выполнено по схеме (фиг.2. Оно состоит из последовательно по каждой координате соединенных реверсивного счетчика 14 и преобразователя 15 код- напряжение элемента ИЛИ 16, входы которого подключены к выходам реверсивного счетчика 14, а выход - по каждой координате к соответствующему входу элемента И 17, с выхода которого снимается сигнал об окончании позиционирования и подается ка соответствующий вход блока 1 ввода программы,
Коммутатор 10 представляет собой электронное реле, управляемое выходным напряжением логического блока 11 следующим образом; если (дх - mjjK ( - , первый выход устройства управления 2 подключен к первому входу блока 9 коррекции и второй вы ход устройства управления подключен .к второму входу блока коррекции; если лХ1 , первый выход устройства управления 2 подключается к второму входу блока 9 коррекции
49484А
и второй выход устройства управления подключается к первому входу блока 9 коррекции.
Коммутаторы 3 и 4 предназначены .
5 для подключения выхода блока 9 коррекции к управляющему входу регуляторов 12 или 13, в зависимости от соотношения заданных перемещений по каждой координате.
10 Координатные приводы 5 и 6 осуществляют координатные перемещения.
Датчики 7 и 8 преобразуют коорди- , натные перемещения в унитарный код, который поступает на соответствую15 щие входы реверсивных счетчиков
блока 2 управления. Например, датчики линейных перемещений ВЕ .
Блок 9 коррекции вырабатьшает сигнал функционально зависящий от со20 отнощения заданных перемещений, т.е. представляет соб.ой делитель аналоговых сигналов на основе перемножителя.
Логический блок 11 предназначен
25 для управления коммутаторами 3,4 и to в соответствии с рассогласованиями по каждой координате. Логический блок 11 вьшолнен в виде двух- порогового компаратора, входы кото30 рого подключены к соответствующим выходам устройства управления 2, а выход подключен к управляющим входам коммутаторов 3,4 и 10.
Функция логического блока 1I зак5 лючается в том, что он формирует сигнал управления коммутаторами 3 4 и 10 согласно закону
,ьп
+и , если 1ДХ1- inl4Yl О ,
если - 1 лУ 1 -mUyUf
если |йХ -tti 1дУ 1 -5
jrl«
Vx,
Vu
при vi
Утох
Регуляторы 12 и 13 представляют собой регулируемые усилители- ограничители, уровень ограничения которых изменяется в соответствии с сигналом, снимаемым с выхода блока 9 коррекции при подключении последнего к управляющим входам одного из регуляторов посредством коммутаторов 3 или 4.
Система работает следуиндим образом.
Блок 1 ввода программы согласно программе выдает координаты точки позиционирования ± Х, цифро3
вой форме. Эти координаты запоминаются в реверсивных счетчиках устройства 2 управления. Сигналы рассогласования по каждой координате ЛХ и лУ, в.ьщаваемые устройством 2 управления, поступают на входы блока 9 коррекции через третий коммутатор 10, логического блока 11 и регуляторов 12 и 13. Логический блок управляет коммутаторами 3,4 и 10 следующим образом: если 1лХ I - п X , управляющие входы регуляторов отключены от выхода блока коррекции и сигналы рассогласования поступают с выходов устройства 2 управления на координатные приводы ограниченными на уровне, соответствующем максимально допустимой скорости по каждой координате. Здесь
; коэффициент w опреm
l. L noxvy max
деляет соотношение максимально допустимых скоростей перемеп(ения по каждой координате. Если UX) - rnliYK-, перемещение по координате X произI ВОДИТСЯ со скоростью V
так как при этом посредством третьеI
го коммутатора 10 первьм выход устройства 2 управления подключен к первому входу блока 9 коррекции, и второй выход устройства управления подключен к второму входу блока коррекции, а выход блока 9 коррекции посредством первого коммутатора 3 подключен к управляющему входу регулятора 12, тем самым производится ограничение скорости перемещения по координате X. В то же время перемещение по координате У ведется оптимально по быстродействию со скоростью V,,. Если ;лХ1- m ) дУ 1 f , перемещение по координате У произ/)У водится со скоростью Vy -y- m-Vy,
так как при этом посредством третьего коммутатора 10 первый вьпсод устройства 2 управления подключен к второму входу блока 9 коррекции, и второй выход устройства управления подключен к первому входу блока коррекции, а выход блока коррекции посредством второго коммутатора 4 под- ключается к управляющему входу регултора 13, чем производится ограничени скорости перемещения по координате У
249484.4
в то же время перемещение по координате X ведется оптимально по быстродействию со скоростью Чт . Таким образом, позиционирование производится по прямолинейной траектории.
как при
ДХ Vx
этом -4 у Vy
и направ10
f5
20
, 25
30
35
40
50 55яе,
45
ление вектор-моментной скорости совпадает с прямой, соединяющей начальную точку с заданной.
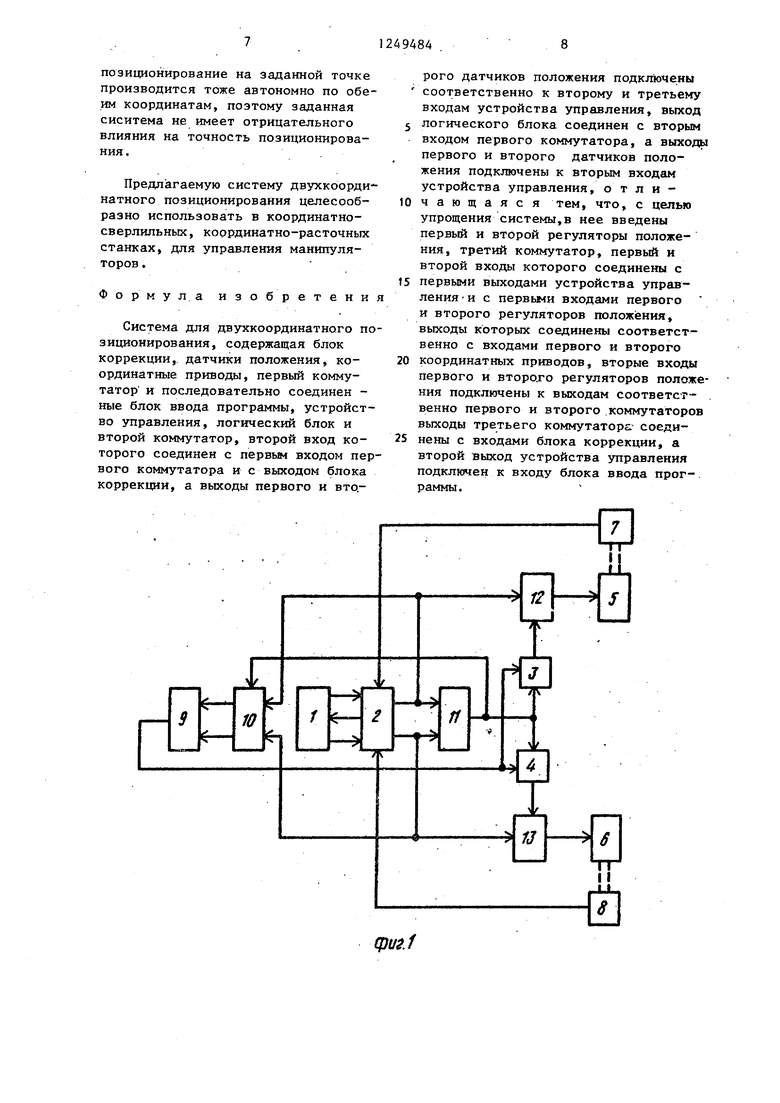
Работа системы при двухкоординат- ном позиционировании поясняется графиками, представленными на фиг.З. Исходное положение системы позиционирования совмещено с началом координат. Максимально допустимые скорости перемещения по координатным, осям X и Y образуют прямоугольник ABCD, по углам которого проведенные линии АОС и DOB делят область позиционирования на четыре сектора. В 1 и 111 секторах большие двухкоор- динатные перемещения осуществляются с максимально допустимой скоростью по оси X, равной + V, а скорость по оси Y определяется уровнем ограничения входного сигнала привода координаты Y соответствующим регулятором. Во 1I и IV секторах большие двухкоординатные перемещения осуществляются с максимально допустимой скоростью по оси У , равной + у, а скорость по оси X определяется сигналом управления приводом координаты X, ограниченным на соответствующем уровне посредством регулятора той координаты. Например, перемещение из начала координат в точку R (1-й сектор) производится с координатными скоростями V (по координате X) и V (по коор- i динате Y), обеспечивающими заданное перемещение по прямолинейной траектории за минимальное время, определяемое максимальным быстродействием по координате X. Перемещение из начала координат в точку N (11-й сектор) будет производиться с коорди- натньми скоростями V (по координате Y) и (по координате Х по прямолинейной траектории за минимальное время, определяемое максимальным быстродействием по координате У . Аналогично будет осуществляться перемещенияв 1 11 -м HlV-MceKTopax.
Перемещения в точки, лежащие внутри пунктирами ограниченной области.
определяемой зоной нечувствительноети t логического блока 1 1, осу- щестйляются автономно по обеим координатам с максимальными скоростями каждой из них. Если в момент перемещения ввиду несоответствия координатных скоростей взаиморасположение начала координат, совмещенног.о с текущими координатами перемещаемой точки и заданной конечной точки изменится так, что конечная точка, перемещающаяся вместе с системой координат, выйдет из зоны нечувствительности, логический блок сработает и подключает выход блока коррекции посредством соответствующего коммутатора к входу управления регулятора скорости привода той координаты, по которой соотношение рассог- ласования к максимальной скорости меньше,чем скорость привода по той координате ограничится на уровне, при котором будет обеспечено прямолинейное перемещение изображающей точки на плоскости.
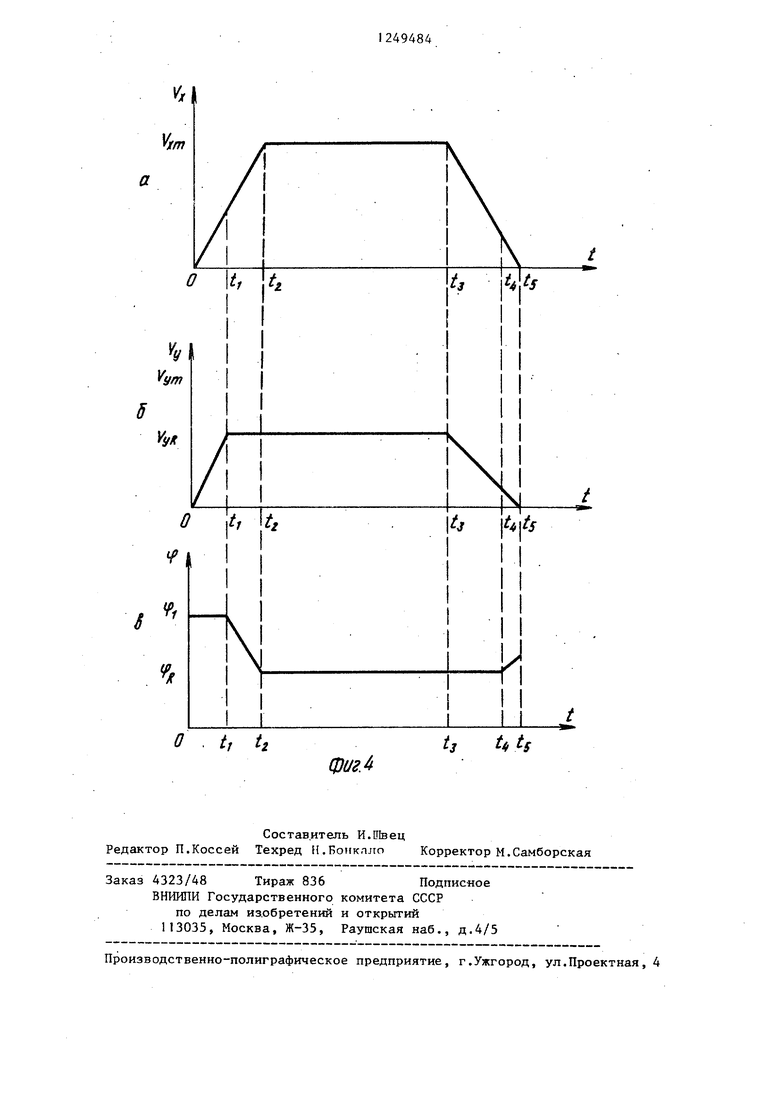
С целью более наглядной иллюстрации процесса позиционирования с применением данной системы на фиг.4а, б,в представлены временные диаграм- мы работы системы при позиционировании, например, в точку R (Г-й сектор На фиг,4а изображена диаграмма скорости координатного привода, выполняющего большие перемещения.На фиг.4б изображена диаграмма скорости координатного привода, выполняющего меньшее перемещение, На фиг.4в представлена диаграмма изменения аргзп ен та вектора моментной скорости изоб- ражающей точки Y arctg Vy / . Перемещение в заданную точку производится следующим образом. В период времени 0-t происходит разгон координатных приводов с оптимальным ускорением 5 и поэтому в период времени 0-t аргумент вектора моментной
скорости будет равен f. atctg
YiHj
V,
Xm
Однако, ввиду того, что при дУ /sX (здесь AY и йХ - рассогласования по соответствующим координатам), логический f5лoк 1 1 посредством коммутатора 4 подключает выход блока коррекции к управляющему входу регу- лятора 13. Напряжением, снимаемьм с выхода блока кoppeкu и, ограничивается выходное напряжение регулятора 13 на таком уровне, что перемещение в направлении координаты У
,, лУк ..
производится со скоростью Vi
Д X С
т.е.разгон по координате У прекращается , а в направлении координаты X продолжается до момента вре- мени t . При этом в период времени t - -t- аргумент вектора моментной скорости меняет свое значение от Ч до ifg , при котором он совпадает с аргументом вектора, соединяющего начало координат с заданной точкой,
так как V, -
п
у- Если предR
положить, что последнее равенство сохраняется в период времени t tj, т.е. в этот период соотношение скоро тейУуд/ „ .не меняется, то позиционирование будет производиться по прямолинейной траектории совпадающей с прямой, соединяющей начало координат с заданной точкой. В момент времени t, изображающая точка входит в зону, в которой начинается торможение. При этом уровень ограничения выходного напряжения регулятора меньшей координаты под действием напряжения управления, вырабатьтаемого блоком коррекции, меняется так, чтоб сохранилось соотношение , т.е. скорость привода меньшей координаты тоже снижается и аргумент вектора моментной скорости остается неизменным, перемещение продолжается по прямолинейной траектории до входа изображающей точки в зону нечувствительности (момент времени t) .В этот момент коммутатор под действием сигнала,, постуцающего с логического блока, отключает выход. блока коррекции от управляющего входа регулятора меньшей координаты и окончательное позиционирование производится айтономно по каждой координате. Так как зона нечувствительности выбирается незначительной по сравнению с производньм перемещением то изменение аргумента вектора моментной скорости при окончательном позиционировании не имеет существенного значения.
Перемещения в точки, лежащи е в зоне нечувствительности, ведутся автономно по обеим координатам и, как следствие зтого, окончательное
позиционирование на заданной точке производится тоже автономно по обе- .им координатам, поэтому заданная сиситема не имеет отрицательного влияния на точность позиционирования.
Предлагаемую систему двухкоорди- натного позиционирования целесообразно использовать в координатно- сверлильных, коррдинатно-расточных станках, для управления манипуляторов .
Формула
изобретения
Система для двухкоординатного позиционирования, содержащая блок коррекции, датчики положения, координатные приводы, первый коммутатор и последовательно соединен - ные блок ввода программы, устройство управления, логический блок и второй коммутатор, второй вход которого соединен с первым входом первого коммутатора и с выходом блока коррекции, а выходы первого и второго датчиков положения подключены соответственно к второму и третьему входам устройства управления, выход логического блока соединен с вторым входом первого коммутатора, а выходы первого и второго датчиков положения подключены к вторым входам устройства управления, о т л и чающаяся тем, что, с целью упрощения системы,в нее введены первый и второй регуляторы положения, третий коммутатор, первый и второй входы которого соединены с
первыми выходами устройства управления и с первыми входами первого и второго регуляторов положения, выходы которых соединены соответственно с входами первого и второго
координатных приводов, вторые входы первого и второго регуляторов положения подключены к выходам соответственно первого и второго коммутаторов выходы третьего коммутатора.- соединены с входами блока коррекции, а второй выход устройства управления подключен к входу блока ввода программы.
(pui.f
Нз 5л. 1
ff/t. /
KsSji.l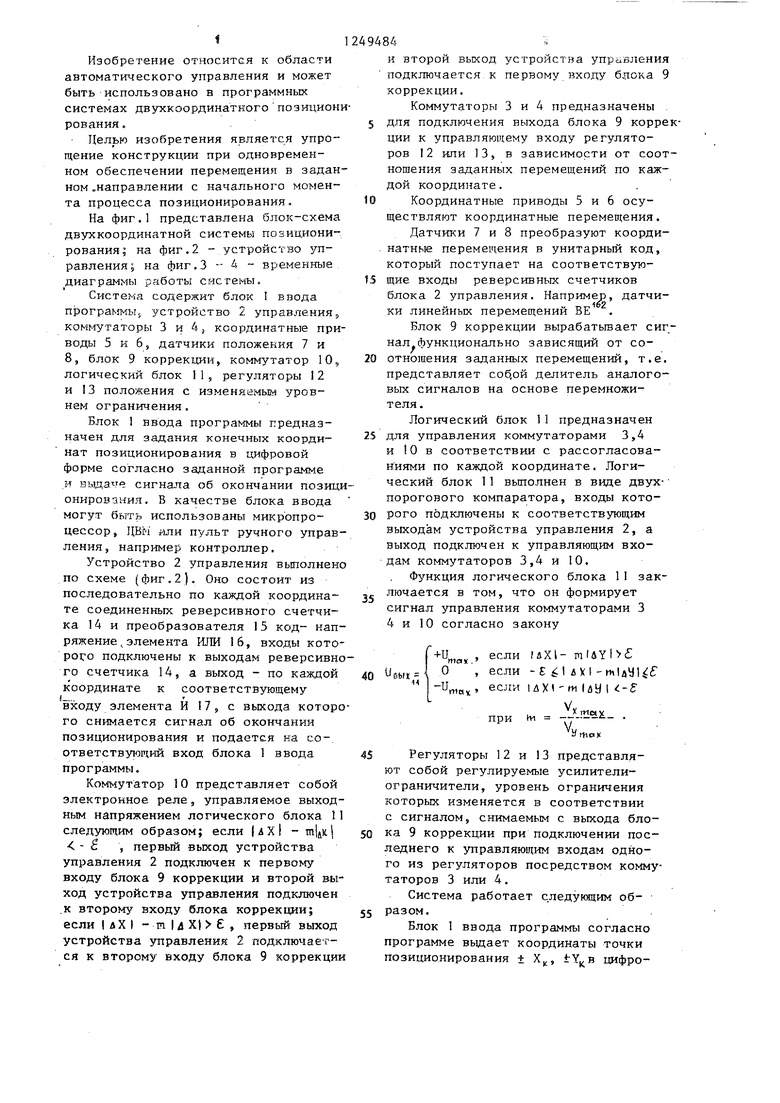
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство двухкоординатного позиционирования | 1985 |
|
SU1288653A1 |
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Двухкоординатное устройство для программного управления | 1984 |
|
SU1193644A2 |
| Устройство для программного управления процессом сборки интегральных микросхем | 1982 |
|
SU1151928A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для двухкоординатного программного управления | 1979 |
|
SU860007A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Двухкоординатная система позиционирования | 1972 |
|
SU470793A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
Изобретение относится к области автоматического управления и может быть использовано в программных системах двухкоординатного позиционирования. Целью изобретения является упрощение конструкции при одновременном обеспечении перемещения в заданном направлении с начального момента позиционирования. Система содержит блок ввода программы, устройство управления, коммутаторы, координатные приводы,датчики положения, блок коррекции, логический блок, регуляторы положения с изменяемым уровнем ограничения. Перемещения в точки, лежащие в зоне нечувствительности, ведутся автономно по обеим координатам и, как следствие этого, окончательное позиционирование на заданной точке производится тоже автономно по обеим координатам, поэтому данная система не имеет отрицательного влияния на точность позиционирования. систему двухкоординатного позиционирования целесообразно использовать в координат- но-сверлильньрс, координатно-расточ- ных станках, для управления манипуляторов . 4 ил. с (О сл IND 4 QD |ib 00 
.x,y,
т
О ir
-3 -
Ws
Уук
О tr t,
6 Ms
S
О - it t,
фиг Л
Составитель И.ПЬец Редактор П.Коссей Техред Н.БопкллоКорректор М.Самборская
Заказ 4323/48 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
tj 4 ts
| Корытин А.И | |||
| и др | |||
| Автоматизация типовых технологических процессов и промыпшенных установок | |||
| Киев- Одесса: Высшая школа, 1980, с.316- 318, рис.10,6 | |||
| Устройство для двухкоординатного позиционирования | 1982 |
|
SU1070512A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
