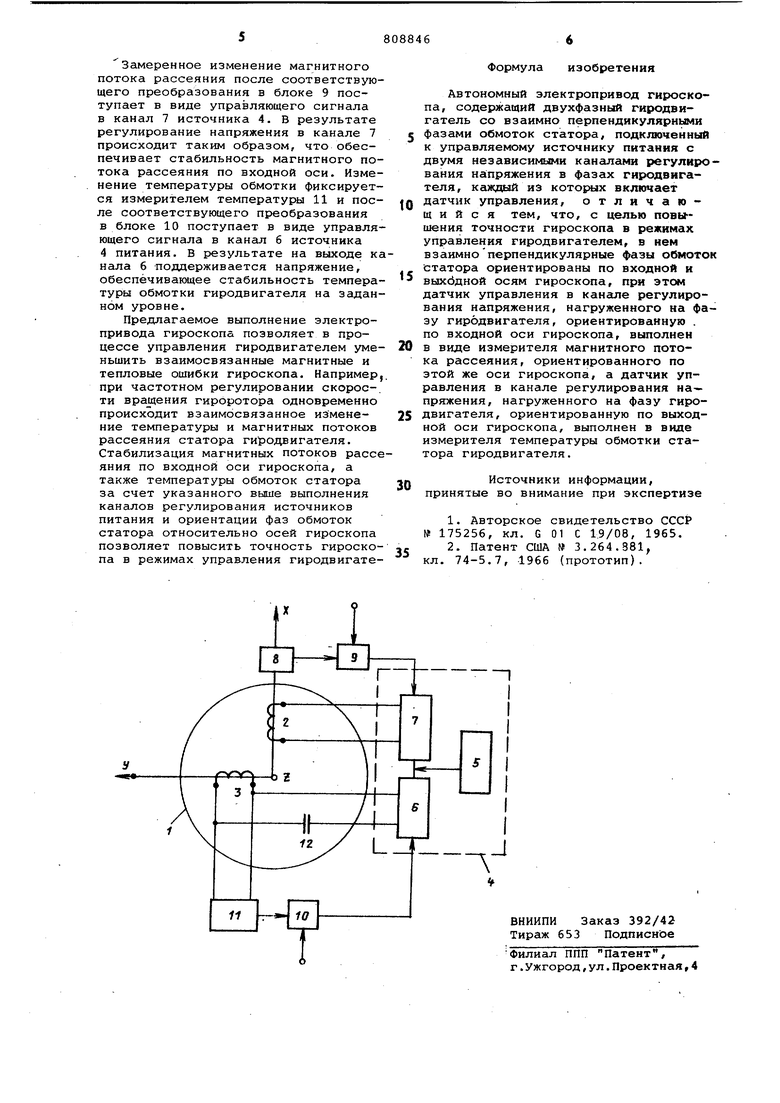
Изобретение относится к приборо- строению и предназначено для прецизионных гироскопов. Известен электропривод гироскопа содержащий многофазный 17иродвигатель,подключенный к выходу стабилизированного источника питания. Для обеспечения необходимой точности ги роскопа в известном электроприводе гиродвигатель выполняется синхронным (например, гистереэисным), а к источнику питания предъявляются жес кие Требования по стабильности час - тоты (tO,005%} и напряжения питания (to,01%) 11. Реализация таких требований при водит к значительному усложнению источника питания и не гарантирует стабильность режима работы гиродвйгателя в части стабилизации взаимосвязанных электромеханических, тепловых и магнитных процессов. Любое изменение параметров нагру ки (момента трения в опорах или аэр динамического момента сопротивления например при изменений температуры окружающей среды) приводит к изменению тока гиродвигателя и, соответственно тепловых и магнитных про цессов при стабильном напряжении питания. Наиболее близким к предлагаемому по технической сущности и достигаемому результату является автономный электропривод гироскопа, содержащий гиродвигатель, подключенный к управляемому источнику питания. Гиродвигатель выполнен двухфазным со взаимно перпендикулярными осями обмотки фаз. Источник питания имеет два независимых канала регулирования напряжения в фазах гиродвигателя,каждый из которых включает датчик управления в функции тока в фазе 1.2. Эта структура электропривода также имеет существенные недостатки. Стабилизация тока в фазах лишь в ограниченных пределах решает задачу теплового режима гиродвигателя. При изменении, например, температуры окружаю1дей среды происходит не только изменение параметров нагрузки, но и активного сопротивления обмоток, что даже при стабильном токе в фазах приводит к изменению потерь в фазах и,следовательно, температуры обмоток. Кроме того, стабилизация тока в фазах в известном электро-приводе осуществляется за счет регулиррваняя напряжения источника питания, что в свою очередь приводит к нестабильности магнитных процессов в гиродвигателе, которые по своему влиянию на точность гироприбо ра имеют в ряде случаев даже большее значение, чем тепловые. Особенно существенный недостаток всех известных электроприводов гироскопа в режимах управления гиродвигателем. В ряде случаев в процессе работы гироскопа для решения тех или иных функциональных задач возникает необходимость управления гиродвигателем. Используется например, режим управления гиродвигателем в виде мо дуляции или реверсирования его скоро сти за счет программного изменения частоты заданного генератора источника питания. В этом случае происходит одновременное и взаимосвязанное изменение скорости вращения, тепловых и магнитных процессов гиродвигателя, что ухудшает точность работы гироскопа. Цель изобретения - повЕлиение точности гироскопа в режимах управления гиродвигателем. Поставленная цель достигается за счет того, что в гиродвигателе взаимно перпендикулярные фазы обмоток статора ориентированы по входной и выходной осям гироскопа, при этом датчик управления в канале регулирования напряжения, нагруженного на ф зу гиродвигателя, ориентированнуюпо входной оси гироскопа, выполнен в виде измерителя магнитного потока рассеяния, ориентированного по этой же оси гироскопа, а датчик управления в канале регулирования напряжения, нагруженного на фазу гиродвигателя, ориентированную по входной оси гироскопа, выполнен в виде измерителя температуры обмотки статора гиродвигателя . При этом в процессе управления ,гиродвигателем изменение потока в фазе гиродвигателя, ориентированной по выходной оси гироскопа, не приводит к появлению магнитной ошибки . гироскопа относительно его выходной оси в силу совпадения вектора магнит ной индукции с этой осью. Изменение магнитного потока в другой фазе прин ципиально приводит к появлению магнитной ошибки гироскопа, однако эта фаза связана с каналом источника питания, в котором напряжение регулируется в функции изменения магнитного потока рассеяния по входной оси гироскопа, таким образом, что стабилизирует магнитный поток рассеяния по этой оси.. Температура обмоток стабилизируе ся на заданном уровне за счет регули рования напряжения на фазе, ориентированной по выходной оси гироскопа. Возможное при этом изменение ма нитного потока по этой оси, как указывалось выше, не приводит к магнитной ошибке гироскопа, в силу хорошей тепловой связи обмоток обоих фаз гиродвигателя (обмотки лежат в одних и тех же пазах) для поддержания стабильности их температуры достаточно регулирование по одной из фаз. На чертеже показана функциональная схема автономного электропривода гироскопа. Автономный электропривод гироскопа содержит двухфазный гиродвигатель 1 со взаимно перпендикулярными фазами обмоток статора 2 и 3, а также управляемый источник 4 питания с программно задающим генератором 5 часто,ты и двумя каналами 6 и 7 регулирования напряжения. При сборке гироскопа магнитные оси симметрии фаз обмоток статора гиродвигателя ориентируются относительно осей гироскопа. Например, фаза 2 ориентирована по входной оси гироскопа X и, соответственно, фаза 3 - по выходной оси гироскопа У. Это можно осуществить,например, путем подачи рабочего напряжения в фазу 3и разворота статора относительно оси вращения гироротора до получения минимума сигнала в датчике 8 магнитного потока (.например, катушечного типа), ориентированного по входной оси гироскопа X. Датчик 8 магнитного потока через усилительно-преобразовательный блок 9 связан с каналом 7 регулирования напряжения источника 4 питания. .Другой канал б регулирования-напряжения источника 4питания связан через усилительнопреобразовательный блок 10 с измерителем 11 температуры фазы 3, ориентированной по выходной оси гироскопа У. Конденсатор 12 выполняет роль гальванической развязки между каналом б источника 4 питания и фазой 3, что необходимо для замера температуры обмотки по ее сопротивлению одним из известных мостовых способов. В усилительнопреобразовательные блоки 9 и 10 вводятся заданные уровни измеряемых величин. Работа автономного привода гироскопа осуществляется следующим образом. При включении источника 4 питания в соответствии с программным изменением частоты задающего генератора 5 будет изменяться скорость вращения ротора гиродвигателя 1, температура и магнитные поля рассея ния гиродвигателя. Изменение магнитного потока рассеяния в фазе 2, которое может привести к магнитной погрешности гироскопа, измеряется датчиком 8 магнитного потока, встроенным в корпус гироскопа (например, по ти1пу катушечных датчиков температуры).
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| Способ подготовки к работе гироскопа с трехфазным гистерезисным двигателем | 1990 |
|
SU1795283A1 |
| Гистерезисный электропривод ротора гироскопа | 1972 |
|
SU534015A1 |
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА В ЭЛЕКТРОПРИВОДЕ С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2013 |
|
RU2541359C1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Фотоэлектрическая система | 1990 |
|
SU1795534A1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1990 |
|
RU2092962C1 |
