Изобретение огносится к гироскопичес кому приборосгроешпо и может быть ис пользовано при разработке прецизионных мгэлогабаритных автоматических гирокомпасов, в частности маркшейдерских. Известен автоматический наземный гирокомпас, содержащий чувствительный элемент, включающий гиромотор с горизонтально закрепленной осью BpamemiH и датчик углового положения чувствительJioro элемента в азимуте относительно корпуса гирокомпаса, соединенный через блок вычислений с управляемым электроприводом L1 J. Недостатки иовестногоустройства обусловлены тем, что ограниченавеличина на чального отклонения чувствительного эле мента от плоскости меридиана, что требует предварительного ориентирования nipOKONmaca. Кроме того, для ориентиров ния запанного направления необкопимо снабдить гирокомпас сложным угломерным 5стройством типа теодолита. Наиболее близким по технической сущ ности к предлагаемому является наземный гирокомпас, содержащий чувствитель ный элемент с размещенными в нем уп-, равляемым и не тправляемым гиромогорамь, оси вращения которых образуют межд собой постоянный фиксированный угол в плоскости, перпендикулярной оси подвеса чувствительного элемента, роторы которо го соед11нень с управляемым и неуправляемым электроприводами, причем выходы датчиков угловой скорости вращения управляемрго и неуправляемого гиромоторов и выход датчика углового положения чувствительного элемента соединены с первым, вторым и третьим входами блока вычислений Г2. Недостаток указанного устройства обу ловлен тем, чго процесс приведения суммарного Вектора кинематического мо мента в меридиан начинается по окончании разгона ротора одного из двух гиррмоторов, что затягивает нестационарный режим работы гирокомпаса и не позволяет достигнуть оптимального быстродейсгВИЯ гиро.компаса. Цель изобретения - повьпцение быстро действия гирокомпаса , Указанная цель достигается тем, что в автоматический наземный гирокомпас, содержащий чувствительный элемент с размещетпэ1ми в нем управляемым и неуправляемым Гиромо торами, оси вращения которых образуют собой постоянный фиксированнт-тй угол в плоскости перпендикулярной оси подвеса чувствител ного элемента, роторы которого соединены с управляемым и неуправляемым электроприводш.л5, причем выходы датчиков угловой скорости вращения управляемого и неуправляемого шромоторов и выход датчика углового положения чувствительного элемента соединены с первым, вторым и третьим входами блоками вычиспе)1ий, введень; последоватепьно соединенные блок извлечения квадратного корня и блок умножения, при этом выход датчика угловой скорсюти вращения неуправляемого гиромогора соединен с входом бло1Ш извлечения квадратного корня, а выход вычислительного блока через второй вход блока умножения - с управляемым электроприводом. На чертеже изофаисена принципиальная схема автомагического наземного гирокомпаса. Автоматический наземный гирокомпас содержит маятниковый чувствительный элемент 1, под1Е ешенный на горсионе 2 в корпусе 3. В чувствительном элементе 1 под фиксированным углом Ч друг к другу в плоскости, пезятендикулярной оси подвеса жестко закреплены оси гиромоторов 4 и 5. Гиромотор 4 подсоединен к Неуправляемому электроприводу б, а гиромотор 5- к управляемому электроприводу 7, Датчики 8 и 9 угловой скорости вращения роторов гиромоторов 4 и 5 и датчик 10 углового положения чувствительного элемента в азимуте расположены на корпусе 3 гирокомпаса. Датчик 9 угловой скорости вращения ротора гиромотора 5 и датчик 10 .тлового положения чувствительного элем:ента в азимуте подсоединены к первому и третьему входам блока 11 вычислений. Датчик 8 угловой скорости вращения ротора гиромотора 4 соединен с вторым входом (элока 11. вычислений и с входом блока 12 извлечения квадратного корня, выход которого связан с одним из (входов блока 13 умножения, второй вход которого соединен с выходом блока 11 вычислений, а выход - с входом управляемого электропривода 7. Гирокомпас работает следующим образом-. При включении прибора ротор гиромотора 4 начинает разгоняться и g появлением кинематического момента Н: - Jp 57 , где JP - момент инерции ротора, 5 угловая скорость врагцения ротора, чувствительный элемент 1 начинает процессирова:гь вокру - вертикальной оси прибора. Датчик 1О У1 лового положения чувстви 3 ,1 тельного элемента в азим:те вырабатывает сигнал, пройорциональный углу рассогласования I между чувствительным элементом 1 и корпусом гирокомпаса 3. Этот сигнал поступает на тр& тий в: од блока вычислений 11, в котором формируется другой , пропорШональный интервалу I Е dt . Одновременно из датчика 8 угловой скорости вр шения ротора гиромотора 4 на вход блока 12 извлечения квадратного корня 1 поступает сигнал, пропорциональный уг ловой скорости S, , С выхода блока 12 извлечения квадратного корня на оди из входов блока 13 умножения поступае сигнал, пропорциональный ) , а на второй вход - сигнал, пропорциональный интегралу dt . С выхода множительного зстройства 13 на вход управляемого электропривоаа 7 поступает сигнал, пропортасональный величине ХЛ. (t И о t . В зависимости от этог сигнала изменяется угловая скорость вращения 5,, ротора управляемого гиромотора 5, и приведение суммарного вектора кинематического момента гирокомпаса в меридиан производится уже во время, разгона ротора неуправляемого. 3754 гиромотора 4. Сигнал ( )dt обеспечивает такое управление приводом 7 ротора управляемого гиромотора 5, при котором переходный процесс по Jтлy оптимален с точки зрения быстродействия. По окончании процесса приведения скорости вращения ротора S неуправляемого гиромотора 4 постоянна и равна но минальному значению Q а ско-- рость вращения ротора управляемого гиро- . мотора 5 достигает величины S12K й основании информации об установившихся значениях S. и Q,, в выI НОМjtк числительном блоке определяется значв-- . 2К .ние угла л arct i характери 1нолзующее положение корпуса гирокомпаса относительно плоскости меридиана. Таким сказом, использование предлагаемого автоматического наземного гирокомпаса дает воа южность сократить время приведения чувствительного элемента В меридиан, поскольку процесс управления ротором управляемого гиромотора начинается уже во время разгона ротора неуправляемого гиромотора.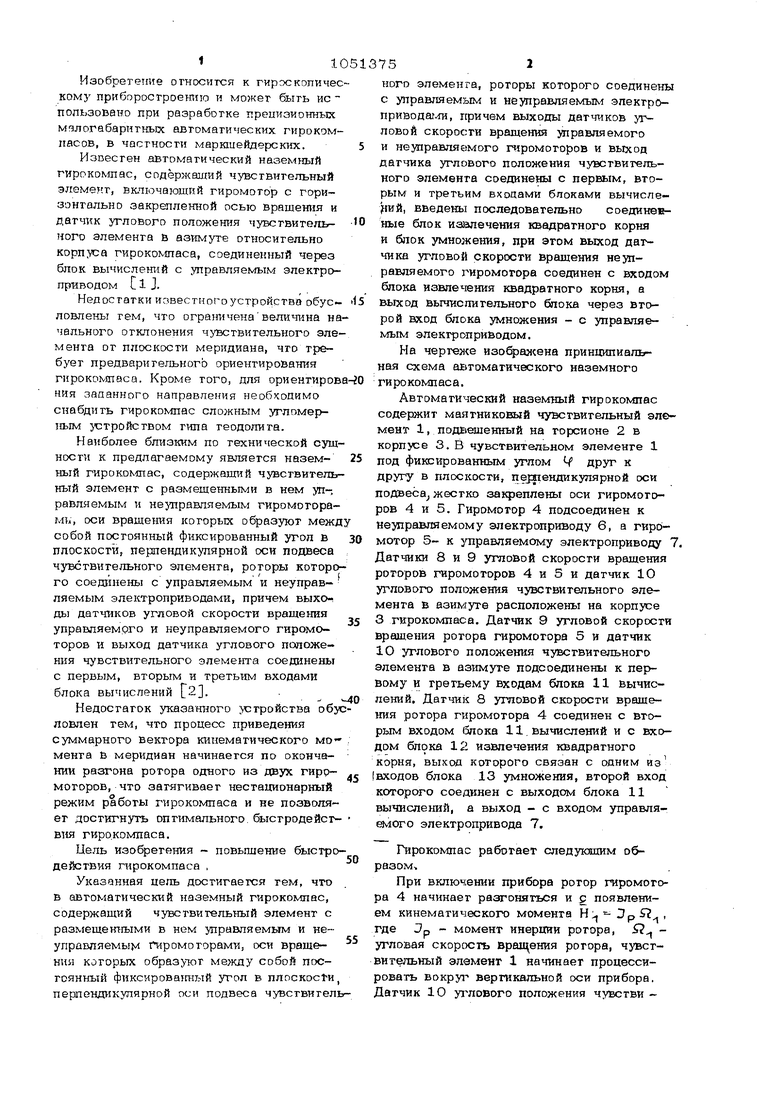

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический наземный гирокомпас | 1979 |
|
SU808847A1 |
| Наземный гирокомпас | 1976 |
|
SU606414A1 |
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| Гирокомпас | 1981 |
|
SU1559844A1 |
| ГИРОКОМПАС | 2015 |
|
RU2611575C1 |
| Гирокомпас | 1982 |
|
SU1559842A1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| Способ определения направления меридиана гирокомпасом | 1978 |
|
SU1602141A1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |

АВТОМАТИЧЕСКИЙ НАЗЕМНЫЙ ГИРОКОМПАС, содержащий чувствительный элемент с размешенными в нем управляемым и неуправляемым гиромоторами, оси врашения которых образуют между собой постоянный фиксированный угол в плоскости, перпендикулярной оси подвеса чувствительного элемента, роторы которого соединены с управляемым и неуправляемым электроприводами, причем выходы датчиков угловой скорости вращения управляемого и неуправляемого гиромоторов и выход датчика углового положения чувствительного элемента соединены с первым, вторым и третьим входами блока вычислений, отличающийся тем, что, с целью повышения бьютродействия, в него введены последовательно соединенные блок извлечения квадратного корня и блок умножения, выход датчика угловой скорости вращения (Л неуправляемого гиромотора соединен с входом блока извлечения квадратного кирня, а выкоа вычислительного блока через второй вход блока умножения - с управляемым электроприводом. ел СА:) ел
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОСКОСТИ МЕРИДИАНА | 0 |
|
SU347573A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматический наземный гирокомпас | 1979 |
|
SU808847A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
