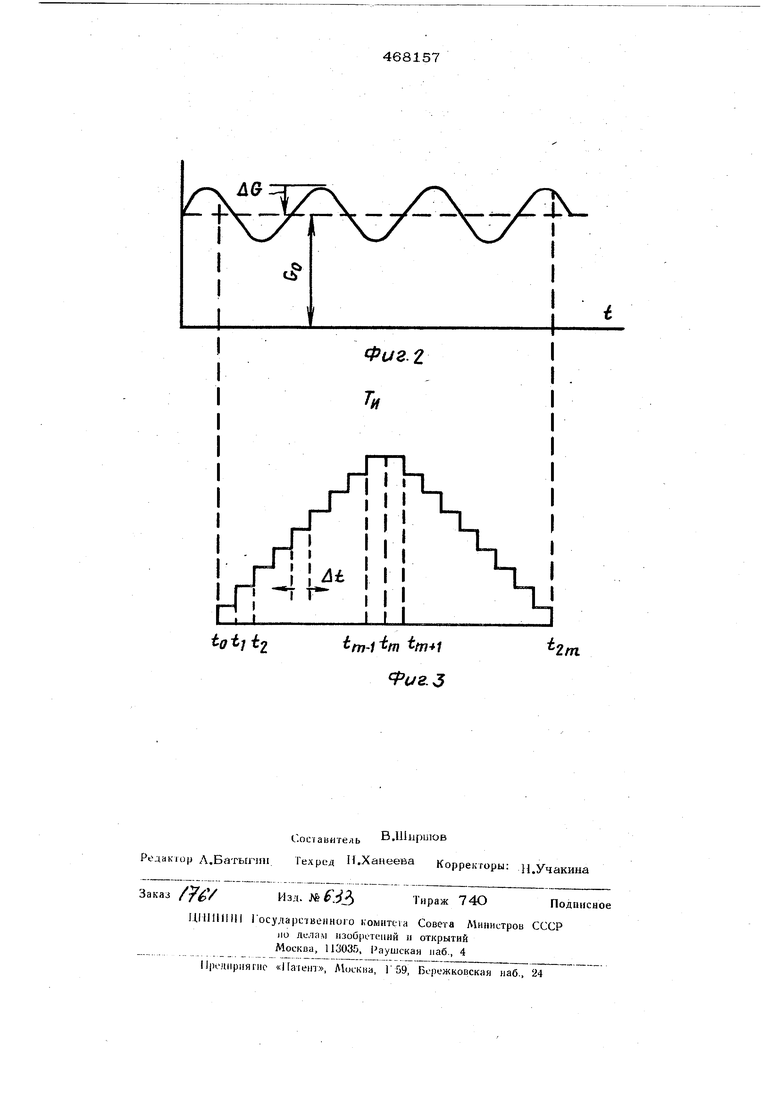
Устройство работает следующим образом. Отрезок времени, в течение которого производят взвешивание, разбивают на 2in .равных интервалов времени At (см, фиг. 2 и З): первый интервал - t р, - t.,,; второй - tj 2 °с ЗД«ий - Полный наезд объекта 2 на весовую платформу 1 фиксируется срабатыванием пе дали 4, сигнал с выхода которой поступает на линию 5 задержки. По истечении времени, которое устанавливают равным времени успокоения первой, наиболее большой полуволны колебаний системы объект - весовая платформа, сигнал с выхода линии 5 задержки поступает на блок 8 управления. На выходе (о) этого блока появляется сигнал, поступающий на вход связанного с ним элемента 9 совпадения. Сигналы датчика 3 ве са, непрерьгоно поступающие на все элементы 9, начинают проходить через первый из них ii линию 11 задержки, задержка кото рой равна нулю, и далее через элемент ЛЛИ - на интегратор 7, Таким образом, в момент t (фиг. З) начинается взвещивание объекта. По истечении промежутка времени tp, - t, появляется сигнал на выходе (l) блока 8 управления, поступающий на вход следующег-о элемента 9 совпадения (сигнал на выходе (о) блока 8 управления при этом не снима ется), ко1-орый открывается, и теперь сигналы датчика, веса проходят также по пени через вторую линию 1О задержки. Временные задержки линий 10 задержки подбираются так, чтобы сдвинуть во времени потоки импульсов, .поступающих от датчика 3 веса по параллельным цепям к элементу ИЛИ друг относительно друга. Таким образом, после открывания второго элемента 9 на интегратор 7 будет поступать от датчика 3 веса в течение време ни tj - t,j (фиг. 3) в два раза больше импульсов, чем поступало в течение времен t,, - t. В момент to появится сигнал на следующем выходе блока 8 управления. откроется очередной элемент 9 « в течение 1 -. . времени t- - 1„ на интегратор 7 будет I поступать утроенное количество импульсов датчика 3 веса. Так продолжается до середины времени измерения Т., (до момента фиг. З), т. е. через каждый проm - 1 межуток времени At в течение времени Тц /2 сигнал датчика 3 веса последова-г тельно умножается на весовой коэффициент, возрасгающий по закону арифметической прогрессии и являющийся целым числом. Сигнал на выходе блока 8 управления длится в течение времени (О.бТ -Д1 + (0,5Тц + Д ), сигнал датчика 3 веса умножается на максимальный весовой коэффициент (верщина пирамиды J фиг. З). По истечение времени (о,) сигналы с выходов блока 8 управления в прямой или обратной последовательности снимаются через промежутки времени, равные ди , В результа- те в прямой или обратной 1к;следовательности закрьгеаются элементы 9 совпадения, следствием чего является умножение сигнала датчика 3 веса на весовой коэффициент, изменяющийся по закону убывающей ариф- метической прогрессии. В момент toim закрывается последний элемент 9, и взвещивание прекращается. Предмет изобретения Устройство взвеигивания движущихся объектов, содержащее весовую платформу, опирающуюся на датчик веса и снабженную недалью, связанной через линию задержки с блоком управления, узел обработки сигнала с элементами совпадения, линиями задержки и элементом ИЛИ и интегратор, о тличающееся тем, что, с целью его упрощения, в нем первые входы всех элементов совпадения узла обработки сигнала подключены к датчику веса, вторые входы Э1Ч1Х элементов соединены с выходами блока управления, а их выходы через линии задержки .с различными уставками подключены к элементу ИЛИ, выход которого подключен к интегратору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания транс-пОРТНыХ СРЕдСТВ | 1979 |
|
SU808865A1 |
| Микропроцессорная весоизмерительная система | 1981 |
|
SU1078255A1 |
| Способ взвешивания движущихся объектов | 1990 |
|
SU1732175A1 |
| Устройство для взвешивания движущихсяТРАНСпОРТНыХ СРЕдСТВ | 1979 |
|
SU853410A1 |
| Система управления объектом с несколькими управляющими входами | 1985 |
|
SU1287105A1 |
| Способ взвешивания движущихся объектов | 1973 |
|
SU460451A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| Устройство для взвешивания движущихся объектов, например, автомобилей | 1975 |
|
SU515949A1 |
| Управляемый сглаживающий фильтр | 1982 |
|
SU1061250A1 |
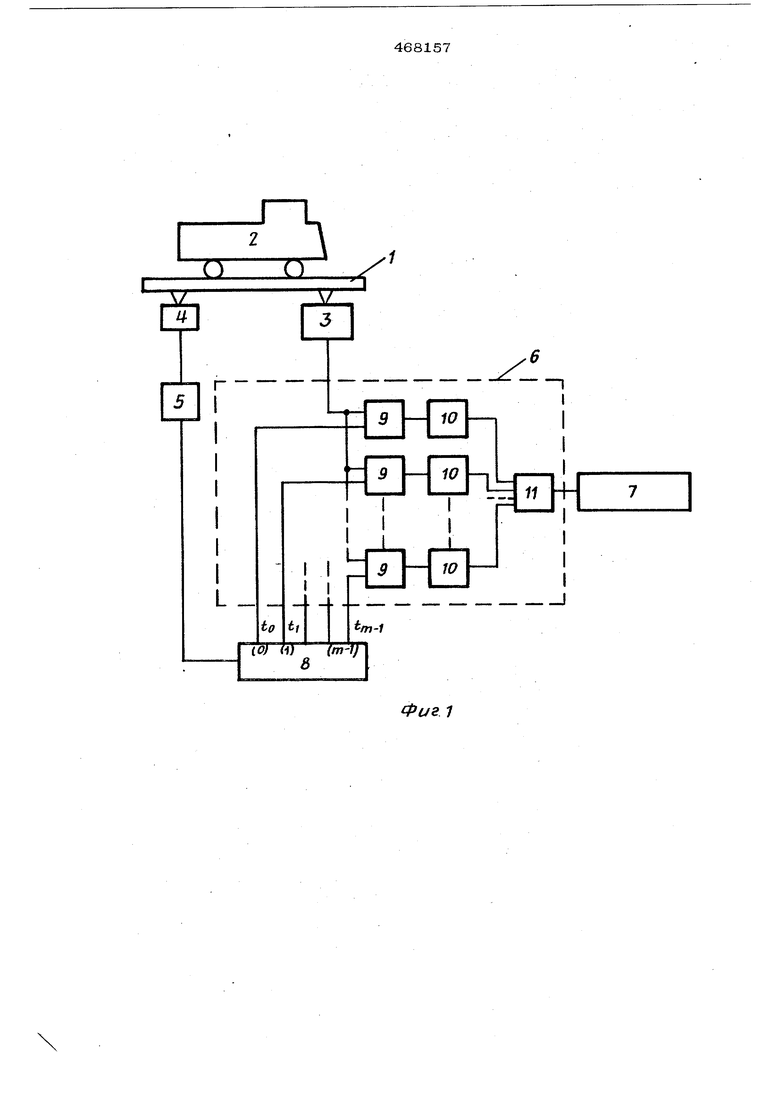
Фиг 1
i-o tj f 2
Фиг. t Ти
гп1 fn fn-H
m иг. J
