(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Двухдвигательная следящая система | 1980 |
|
SU901992A1 |
| Привод наведения | 2021 |
|
RU2767023C1 |
| Устройство для испытания блока гистерезисных электромагнитных муфт | 1983 |
|
SU1148010A1 |
| Следящий электропривод | 1983 |
|
SU1095337A1 |
| ЭЛЕКТРОПРИВОД | 1995 |
|
RU2087068C1 |
| Устройство для управления антенной корабельной радиолокационной станции по курсовому углу | 1974 |
|
SU1841193A1 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1985 |
|
SU1283928A1 |
| Вентильный электропривод | 1988 |
|
SU1633477A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
1
Изобретение относится к автоматическому регулированию и может быть использовано в радиотехнике и приборостроении.
Известна следящая система, содержащая приводной двигатель, блок электромагнитных муфт, элемент сравнения и усиления, состоящий из задающего потенциометра, потенциометра обратной связи и поляризованного реле, и генератор скоростной обратной связи, выполненный в виде тахогенератора 1 и 2.
Однако такие следящие системы характеризуются недостаточной надежностью за счет применения тахогенератора в качестве генератора обратной связи.
Наиболее близкой по технической сущности к предлагаемой является следящая система, которая содержит последовательно соединенные первый блок сравнения, предварительный усилитель, демодулятор, второй блок сравнения, усилитель мощности, блок исполнительных органов (электромагнитных муфт) (БМ), а также тахогенератор 3.
Однако известное устройство недостаточно надежно за счет применения тахогенератора.
Цель изобретения - повышение надежности системы.
Поставленная цель достигается тем, что в следящую систему, содержащую последовательно соединенные первый блок сравнения, предварительный усилитель, демодулятор, второй блок сравнения, усилитель мощности и блок исполнительных органов, дополнительно ведены сумматор и два преобразователя частоты в напряжение постоянного тока, входы которых соединены соответственно со вторым и третьим выходами блока исполнительных органов, а выходы - с соответствующими входами сумматора. Выход сумматора соединен со вторым входом второго блока сравнения. Блок исполнительных органов выполнен в виде блока гистерезисных муфт.
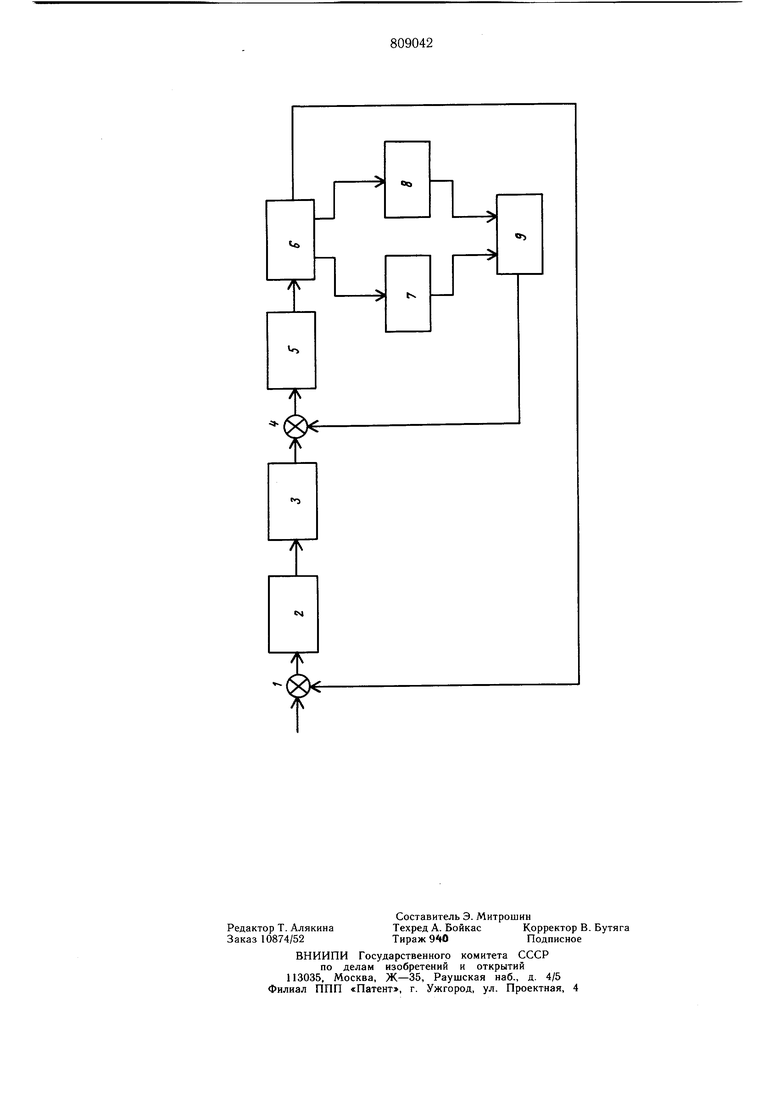
На чертеже изображена функциональная схема следящей системы.
Следящая система содержит последовательно соединенные первый блок 1 сравнения, предварительный усилитель (ПУ) 2, демодулятор (Д) 3, второй блок 4 сравнения, усилитель 5 мощности (УМ), блок 6 исполнительных органов (электромагнитных муфт) (БМ), два преобразователя 7 и 8
частоты в напряжение постоянного тока (ПЧМ) и сумматор 9. При этом блок 6 исполнительных органов выполнен в виде блока гистерезисных муфт. Входы преобразователей 7 и 8 частоты в напряжение постоянного тока подключены соответственно ко второму и третьему выходам блока 6 исполнительных органов, а их выходы соединены с соответствующими входами сумматора 9. Выход сумматора 9 подключен ко второму входу второго блока 4 сравнения.
Следяплая система работает следующим образом.
Первый блок 1 сравнения выявляет разность между входным и выходным углами следящей системы, преобразует ее в напряжение, которое усиливается предварительным усилителем 2, выпрямляется демодулятором 3, сравнивается на втором блоке 4 сравнения с корректирующим сигналом обратной связи (сформированным преобразователями 7 и 8 частоты в напряжение постоянного тока и сумматором 9) и усиливается усилителем 5 мощности, управляющим скоростью выходного вала блока 6 исполнительных органов, выполненного в виде блока гистерезисных муфт и кинематически связанного с первым блоком 1 сравнения. Для получения сигнала, пропорционального скорости вращения выходного вала, используется свойство гистерезисной муфты индуктировать ЭДС в обмотке управления за счет остаточного намагничивания стакана ротора муфты, если на обмотку управления не подается управляющий сигнал, ведомая и ведущая части муфты вращаются со скольжением.
Частота ЭДС пропорциональна скорости вращения стакана ротора, что соответствует скорости вращения выходного вала блока муфт. Напряжение переменного тока, равное ЭДС самоиндукции, наводимой в той из муфт, на обмотку управления которой не подается сигнал с усилителя 5 мощности, поступает на преобразователь 7 или 8 частоты в напряжение постоянного тока, вход которого связан с обмоткой управления этой муфты.
Из напряжения переменного тока преобразователь 7 или 8 частоты формирует напряжение постоянного тока, величина которого пропорциональна частоте напряжения переменного тока и соответственно скорости вращения выходного вала блока 6 исполнительных органов. Напряжение постоянного тока поступает на один из входов сумматора 9, на выходе которого формируется
напряжение обратной связи с определенным знаком (полярностью). Полярность напряжения зависит от того, на какой вход сумматора 9 подается напряжение постоянного тока. Напряжение обратной связи с
выхода сумматора 9 поступает на второй влод второго блока 4 сравнения и, действуя как отрицательная обратная связь, обеспечивает устойчивость следящей системы.
При сохранении простоты и эффективности коррекции предлагаемое техническое
рещение обеспечивает повыщение надежности следящей системы за счет исключения из системы тахогенератора.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
Л
