Изобретение относится к автотракторостроеиию, в часБиости к трансмиссиям транспортных средств и к системам уиравления.
Известен механизм управления тормозами планетарного механизма, содержащий леиточНые тормоза с приводом в виде ведомого рычага, связанного с тормозом, и пружины, взаимодействующей с этим рычагом 1.
В этом механизме осуществляется необходимая затяжка тормозных лент независимо от их из.носа, что увеличивает межрегулировочные сроки механизма, а также некоторое снижение максимального усилия на рычаге оператора за счет серводействия пружины.
Однако усилия на рычаге оператора остаются большими.
Известен также .механизм управления тормозами, содержащий ведомый рычаг, связанный с тормозом и имеющий спрофилированную по окружности рабочую поверхность, с которой взаимодействует ролик, установленный на конце ведущего рычага 2.
Однако в указанном механизме при неизнон1енной тормозной ленте для ее затяжки используется не весь максимально доиустимый (регламентированный) ход управляющего рычага, что ведет к увеличению требуемого усилия на органе управления. При регулировке же управляющего рычага на полный его ход необходимость в регулировке зазора между v eнтoй и барабаном возникает даже при самом незначительном износе ленты. Это сокращает межрегулировочные сроки.
Цель изобретения - улучщение условий эксплуатации путем снижения }сплцй на органе управления и увеличение межрегулировочных сроков.
Поставленная цель достигается тем, что в механизм, содержащий орган управления, ведомый рычаг с лрофплированной рабочей поверхностью и ведущий рычаг, щарнирно закрепленный на корпусе, кинематически связанный с органом управления и иосредстзом ролика - с рабочей поверхностью ведомого рычага, кинематически связанного с тормозом, введены наЖНмной. механизм, огранич.итель перемещения рол-ик, вдоль ведущего рычага на участке свободного хода тормоза н ограничитель иоворота ведущего рычага, при этом ролик иоследиего связан с нажимным механизмом для взаимодействия с рабочей поверхностью ведомого рычага. Ограничитель перемещения ролика выполнен в виде тяг, закрепленных одним концом на неподвижной осп, параллельной оси ведущего рычага, и имеющих на другом конце продольные лрорези, пр.ичем наж,имной механизм совмещен с ведущ им :рыча1гом и содержит цилиндрический полый корпус, в котором подпружинен шток с закрепленным «а его конце рол.иком, ось .последнего размещена в ирорезях тяг.
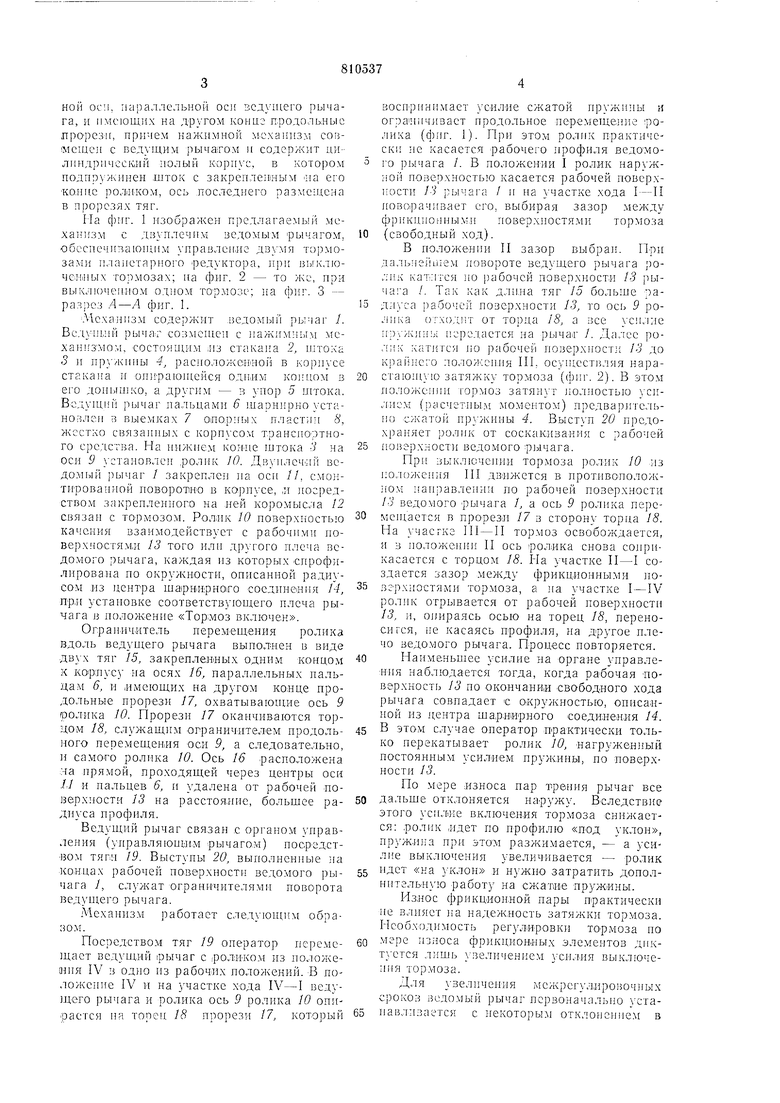
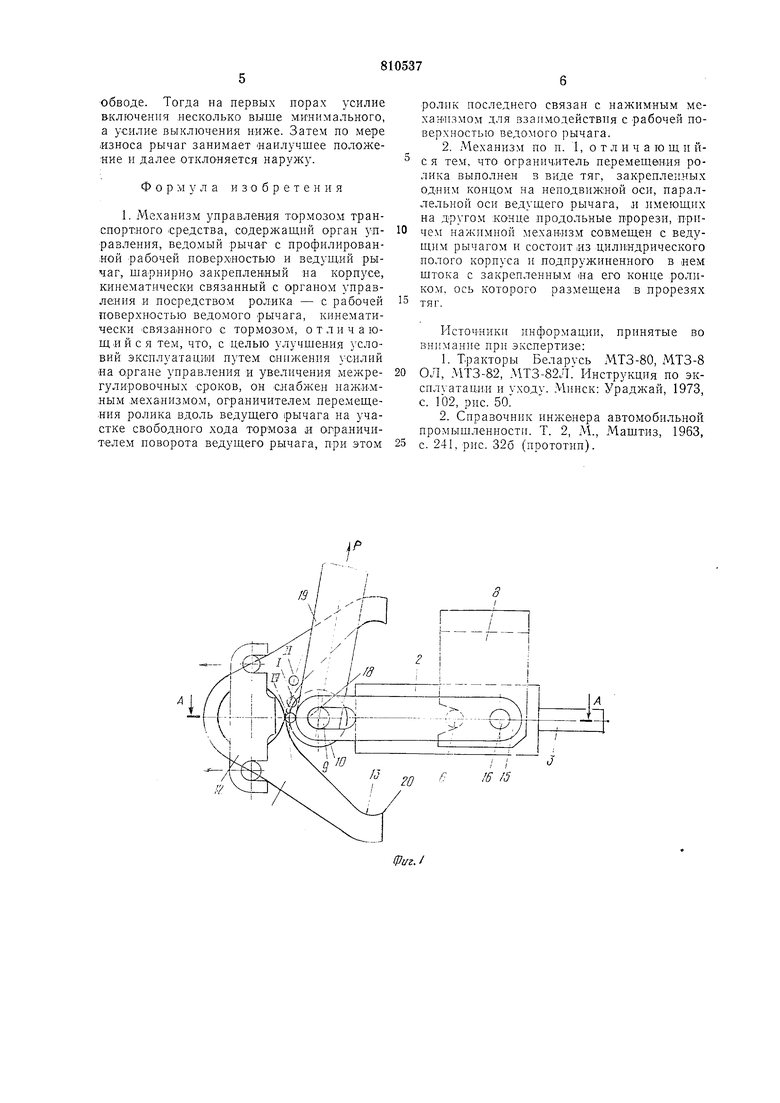
На фнг. 1 изображен предлагаемый механизм с двуплечим ведомым рычагом, обеснечизаюп1,нм управление двумя тормозами планетарного редуктора, нри выключенных тормозах; на фиг. 2 - то же, при выключенном одном тормозе; на фиг. 3 - разрез .4-А фиг. 1.
Механизм содержит ведомый рычаг /. Ведущий рычаг еовм.ещен с нажимным механизмом, состоящим :Из стакана 2, щтока 3 и пр жииы 4 раеположевной в корпусе стакана и опирающейся одним концом в его доныигко, а другим - в упор 5 щтока. Ведущий рычаг пальцами 6 щарлирно установлен в выемках 7 опорных пластин 8, жестко связанных с Корпусом траиспортиого средства. На нижнем конце щтока 3 па оси 9 установлен ролик 10. Двунлечий ведомый рычаг / закреплен на оси //, смоитировапиой иоворотно в корпусе, и посредством закрепленного на ней коромысла /2 связан с тормозом. Ролик 10 поверхностью качения взаимодействует с рабочими поверхностями 13 того или другого плеча ведомого рычага, каждая из которых спрофидировапа по окружности, описанной радиусом пз центра шарнирного соединения М, при устаиовке соответствующего плеча рычага в положение «Тормоз включен.
Ограничитель перемещения ролика вдоль ведущего рычага выполнен ;в виде двух тяг 15, закрепленных одним концом к корпусу па осях 16, параллельных пальцам 6, и имеющих на другом конце продольные прорези 17, охватывающие ось 9 /ролика 10. Прорези 17 оканчиваются торцом 18, служащим ограничителем продольного перемещения оси 9, а следовательно, и самого ролика 10. Ось 16 расположена на прямой, проходящей через центры оси J:l п пальцев 6, и удалена от рабочей поверхности 13 на расстояние, большее радиуса профиля.
Ведущий рычаг связан с органом управления (управляющим рычагом) посредством тяги 19. Выступы 20, выполненные на концах рабочей поверхности ведомого рычага /, служат огр.аничителями поворота ведущего рычага.
Механизм работает следующим образом.
Посредством тяг 19 оператор перемещает ведущий |рычаг с роля-ком из положения IV в одно из рабочих положений. В положение IV и на участке хода IV-I ведущего рычага и ролика ось 9 ролика 10 онирается на торец 18 ирорези 17, который
воспринимает усилие сжатой пружины и ограничивает продольное иеремещенне ролика (фиг. 1). При этом ролик практически не касается рабочего профиля ведомого рычага 1. В положении I ролик наружной поверхностью касается рабочей поверхности 13 рычага 1 и на участке хода I-II поворачпвает его, выбирая зазор между фрикционными поверхностями тормоза
(свободный ход).
В положении II зазор выбран. При дальнейшем повороте ведущего рычага ролик катится по рабочей поверхности 13 рычага /. Так как длина тяг 15 больще радиуса рабочей поверхности 13, то ось 9 ролика огходит от торца 18, а все усилие пружины передается на рычаг /. Далее ролик катится по рабочей поверхиостп 13 до к)айнего положения III, осуществляя иарастающую затяжку тормоза (фиг. 2). В этом положении тормоз затянут полиостью усиЛИе.м (расчетным моментом) предварительно сжатой пружины 4. Выступ 20 иредохраняет ролик от соскакивания с рабочей
поверхности ведомого рычага.
При выключении тормоза ролик 10 из положения III движется в противоположном направлении по рабочей поверхности 13 ведомого рычага 1, а ось 9 ролика перемещается в прорезл 17 в сторону торца 18. Па учасгке П1-II тормоз освобождается, и в положении II ось ролика снова соприкасается с торцом 18. На участке II-I создается зазор между фрикционными повэр.хностями тормоза, а на участке I-IV ролик отрывается от рабочей поверхности 13, и, опираясь осью на торец 18, переноси гея, не касаясь профиля, на другое плечо ведомого рычага. Процесс повторяется.
Наименьшее усилие на органе управления наблюдаетея тогда, когда рабочая поверхность 13 по окончании свободного хода рычага совпадает с окружностью, описаиной из центра шариириого соединения 14.
В этом случае оператор практически только перекатывает ролик 10, «агружениый постоянным усилием пружины, по поверхности 13.
По мере износа пар трения рычаг все
дальше отклоняется наружу. Вследствие этого усил1ие включения тормоза снижается: ролик идет по профилю «под уклон, пружина ири этом разжимается, - а усилие выключения увеличивается - ролик
идет «на уклон и нужно затратить дополнительную работу на сжат1ие пружины.
Пзнос фрикционной пары практически не влияет на надежность затяжки тормоза. Пеобходимость регулировки тормоза по
мере износа фрикционных элементов диктуется лищь увеличением усилия выключе;ния тормоза.
Для увеличения межрегулировочных сроков ведомый рычаг первоначально устанавлпвается с некоторым отклонением в
обводе. Тогда на первых по-рах усилие включения несколько выше минимального, а усилие выключения ниже. Затем по мере износа рычаг занимает «аилучшее положение и далее отклоняется наружу.
Формула изобретения
1. Механизм управления тормозом транCnopTiHoro средства, содержащий орган управления, ведомый рычат с профилированной рабочей поверхностью и ведущий рычаг, и арнирно закрепленный на корпусе, кинематически связанный с органом управления и посредством роллка - с рабочей поверхностью ведомого рычага, кинематически связанного с тормозом, отличающийся тем, что, с целью улучшения условий эксплуатации путем снижения усилий «а органе управления и увеличения межрегулировочных сроков, он снабжен нажимным .механизмом, ограничителем перемещения ролика вдоль ведущего рычага яа участке свободного хода тюрмоза и опраничителем поворота ведущего рычага, при этом
ролик последнего связан с нажимным механизмом для взаимодействия с рабочей поверхностью ведомого рычага.
2. Механизм по п. 1, отличающийся тем, что ограничитель перемещения ролика выполнен в виде тяг, закреплеилых одним концом на неподвижной оси, параллельной оси ведущего рычага, и имеющих на другом конце продольные врорези, причем нажимной механизм совмещен с ведущим рычагом и состоит из цилиядрического полого корцуса и подпружиненного в «ем щтока с закрепленным на его конце роликом, ось которого размещена в прорезях тяг.
Источники информации, принятые во внимание при экспертизе:
1.Тракторы Беларусь МТЗ-80, МТЗ-8 ОЛ, МТЗ-82, МТЗ-82Л. Инструкция по эксплуатации и уходу. Минск: Ураджай, 1973, с. 102, рис. 50.
2.Справочник инженера автомобильной промышленности. Т. 2, М., Мащтиз, 1963, с. 241, рис. 326 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемное устройство | 1990 |
|
SU1740311A1 |
| Механизм управления тормозом транспортного средства | 1980 |
|
SU990566A2 |
| Реверсивная лебедка | 1977 |
|
SU678023A1 |
| КОЛОДЦЕВ СТОЯКОВ коксовых ПЕЧЕЙ | 1970 |
|
SU277720A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1991 |
|
RU2007323C1 |
| Гидромеханическая трансмиссия транспортного средства | 1988 |
|
SU1593991A2 |
| УСТРОЙСТВО АТТРАКЦИОНА | 2005 |
|
RU2281801C1 |
| Механизм управления поворотом гусеничного трактора | 1985 |
|
SU1311988A1 |
| Автомат для насекания надфилей | 1986 |
|
SU1360922A1 |
| Двухпоточная муфта сцепления | 2020 |
|
RU2755842C1 |
-77
8
I
-М
I/
iff
т
fff 18
Ф1,г.1
