с блоком отслеживания пути загружаемого вагона, при этом общая протяженность платформ вдоль рельсового пути больше суммы размеров пути вагона при загрузке и расстояния между осями нарулшых колесных пар этого вагона, а длина каждой платформы меньше расстояния между осями ближайших колесных пар загружаемого и соседнего вагонов.
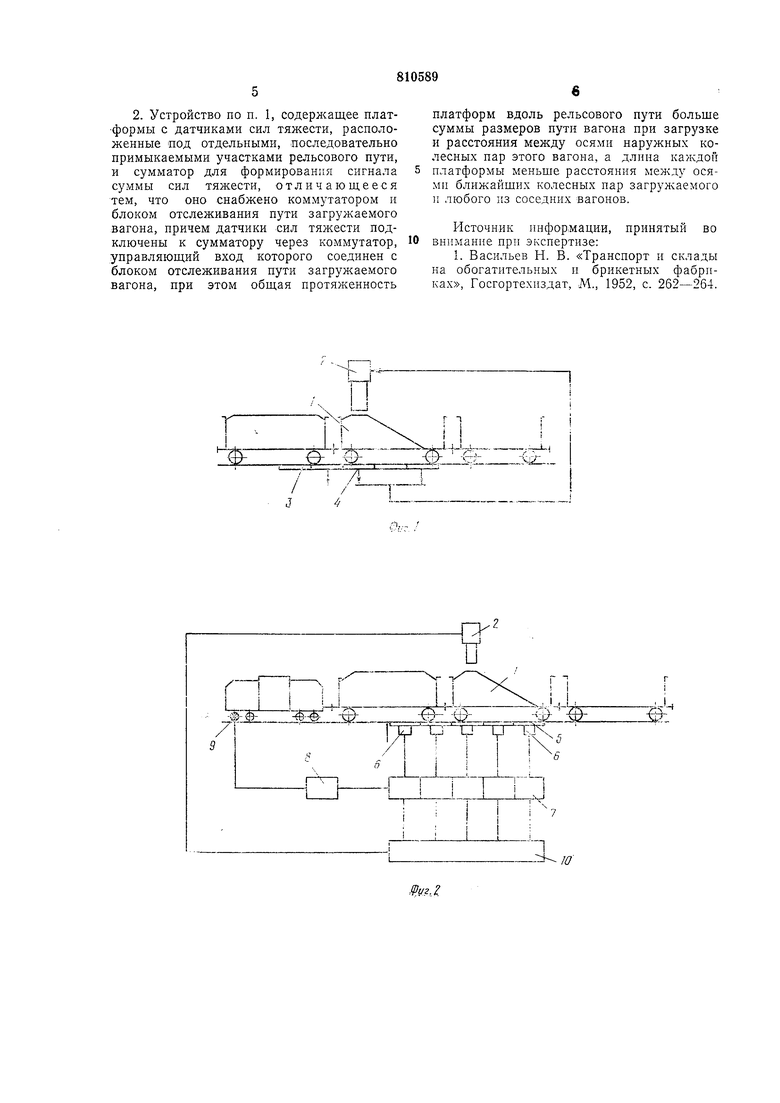
На фиг. 1 показана схема взвешивания движуш;егося вагона в зоне загрузки; на фиг. 2 - структурная схема устройства для взвешивания вагонов при загрузке.
Сушность способа заключается в следуюш,ем.
Состав нерасцепленных вагонов / (фиг. 1) непрерывно перемеш,ают под загрузочиым устройством 2. Когда очередной вагон / занимает исходное положение под загрузочным устройством 2, в него начинают подавать сьшучий груз. Для обеспечения дозирования порции сыпучего груза и равномериого размещения его в кузове вагона, загружаемый вагон «епрерывно взвешивают, что позволяет контролировать его массу брутто в течение всего цикла загрузки. Для осуществления этого взвешивания зона загрузки (путь, проходимый вагоном под загрузочным устройством при загрузке) разбита на измерительные участки 3, на каждом из которых измеряют силы тяжести, передаваемые на рельсы колесными парами вагоиов.
Размеры измерительных участков исключают возможность одновременного нахождения на любом из них колесных пар соседних вагонов. Перемещение загружаемого вагона в зоне загрузки контролируют и согласно результатам этого контроля выделяют сигналы оил тяжести 4 с тех измерительных участков 3, на которых, в дан.ное мгновение, находятся колесные пары загрзжаемого вагона 1. При переходе колесных пар загружаемого вагона с одного измерительного участка 3 на другой соотiBexcTBCHHo изменяют выделяемую группу сигналов сил тяжести 4 вагонов, вырабатываемых измерительными участками зоны загрузки.
Выделяемые сигналы непрерывно суммируют и результат этого суммирования подают в систему управления загрузочным устройством 2 для выработки управляющих команд. В соответствии с этой командой при достижении массы брутто загружаемого вагона заданному значению, прекращается подача сыпучего груза в вагон.
В дальнейшем, начиная с момента входа очередного вагона в зону загрузки, цикл взвешивания повторяют аналогично изложенному выше.
Устройство, реализующее указанный выше способ, содержит систему платформ
5 (фиг. 2), расположенных вдоль пути перемещ-ен,ия вагонов / под загрузочным устройством 2. Каждая из платформ 5 оснащена датчиком 6 силы тяжести. Линейный размер платформы 5 вдоль пути вагонов меньше, чем расстояние между ближайшими осями колесных пар соседних вагонов. Датчики 6 сил тяжести раздельно подключены к коммутатору 7. Устройство
оснащено также блоком 8 отслеживания пути загружаемого вагона, работающим па временном принципе или по команде от датчика 9 скорости движения состава. Выход блока 8 соединен с управляющим входом коммутатора 7. Выходы коммутатора подключены к сумматору 10, который в свою очередь подключен к системе управления загрузочным устройством 2.
Устройство работает следующим обрам.
В процессе загрузки состава при съезде очередного вагона / в зону загрузки, расположенную под устройством 2, коммутатор 7 по команде от блока 8 соединяет с сумматором 10 датчики 6 сил тяжести тех платформ 5, на которых в это мгновение расиолагается вагон, который загружается при непрерывном движении. В процессе загрузки вагон ,1 изменяет свое положение на платформах 5. При съезде колесной пары вагона / с одной из платформ 5 и въезде ее на другую платформу коммутатор 7 по команде блока 5 отключает от сумматора
10 один датчиков 6 сил тяжести и подключает к нему другой.
Таким образом, сигналы сил тяжести загружаемого вагона / непрерывно подаются к сумматору 10. Сигнал, пропорциональный текущему значению массы брутто загружаемого вагона, выдается в систему управления загрузочным механизмом для управления потоком сыпучего груза.
Формула изобретения
1. Способ взвешивания вагонов при загрузке их сыпучим грузом, при котором на
отдельных участках рельсового пути измеряют силы тяжести, передаваемые колесными парами вагонов, причем на любом участке измеряют силы тяжести только одного вагона, и формируют сигнал, пропорциональный массе брутто загружаемого загона, отличающийся тем, что, с целью повышения точности взвещивания, вагоны в периоды загрузки взвещивают непрерывно и при этом непрерывно перемещают, причем отслеживают путь очередного вагона в период его загрузки и непрерывно выделяют, н суммируют сигналы сил тяжести с группы чередующихся участков, на которых в данный момент времени находится этот вагон.
2. Устройство по п. 1, содержащее платформы с датчиками сил тяжести, расположенные под отдельными, последовательно примыкаемыми участками рельсового пути, и сумматор для формирования сигнала суммы сил тяжести, отличающееся тем, что оно снабжено коммутатором и блоком отслеживания пути загружаемого вагона, причем датчики сил тяжести подключены к сумматору через коммутатор, управляющий вход которого соединен с блоком отслеживания пути загружаемого вагона, при этом общая протяженность
платформ вдоль рельсового пути больще суммы размеров пути вагона при загрузке и расстояния между осями наружных колесных пар этого вагона, а длина каждой платформы меньще расстояния между осями ближайщих колесных пар загрул аемого и любого из соседних вагонов.
Источник информации, принятый во внимание при экспертизе:
1. Васильев Н. В. «Транспорт и склады на обогатительных и брикетных фабриках, Госгортехиздат, М., 1952, с. 262-264.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для определения расположения центра тяжести груженого железнодорожного вагона | 2021 |
|
RU2784784C1 |
| МНОГОТОЧЕЧНЫЙ ЧАСТОТНЫЙ СПОСОБ ИЗМЕРЕНИЯ МАССЫ И ДЕФОРМАЦИЙ | 2014 |
|
RU2576350C1 |
| НАЗЕМНЫЙ ДИАГНОСТИЧЕСКИЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС | 1997 |
|
RU2120876C1 |
| Способ поосного взвешивания железнодорожных вагонов в движении и устройство для его осуществления | 1981 |
|
SU1023205A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1987 |
|
SU1422017A1 |
| СПОСОБ ДОЗИРОВАНИЯ СЫПУЧИХ ГРУЗОВ ПРИ ЗАГРУЗКЕ ВАГОНОВ | 1993 |
|
RU2098775C1 |
| СПОСОБ ВЗВЕШИВАНИЯ ВАГОНА БЕЗ РАСЦЕПКИ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2012 |
|
RU2495385C1 |
| АВТОМАТИЧЕСКИЙ ПОГРУЗО-РАЗГРУЗОЧНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2018 |
|
RU2689080C1 |
| Устройство автоматического управленияуСТАНОВКОй для зАгРузКи ВАгОНОВдОзиРОВАННыМи пОРцияМи СыпучЕгОгРузА | 1979 |
|
SU814835A1 |
| Способ контроля дозирования сыпучего груза, преимущественно балласта, на железнодорожный путь из специального подвижного состава с известной жесткостью рессорного подвешивания и система для его реализации | 2021 |
|
RU2769590C1 |
