1
Изобретение относится к станкостроению и может быть использовано для повышения точности обработки, а также расширения технологических возможностей путем управления позиционированием револьверной головки с закрепленными в ней режущими инструментами относительно обрабатываемой детали в автоматизированных токарно-револьверных станках с программируемым циклом обработки.
Известен револьверный суппорт, который содержит корпус с выдвижны эксцентричным упором, установленным с возможностью поворота вокруг своей оси, револьверную головку с регулируемым жестким упором, привод круговой рабочей подачи с управляющей муфтой, шаговый двигатель, связанный посредством червячной передачи с выдвижным упором Позиционирование револьверной головки с инструментами в процессе обработки осуществляется прижимом жесткого регулируемого упора, установленного на револьверной головке к эксцентричной части выдвижного поворотного упора с усилием, определяемым муфтой предельного момента в цепи круговой подачи револь Верной головки. За счет того, что нулевое положение .ентриситета выдвижного упора делит подъем эксцентрика пополам, возможен ввод как положительной, так и отрицательной коррекции инструмента 1,
Недостатком известного суппорта является ограниченная точность коррекции положения револьверной
0 головки вследствие того, что муфта предельного момента не может обеспечить строго постоянное усилие прижима регулируемого жесткого упора к эксцентричной части выдвижного
5 упора из-за рассеяния величин сил трения в муфте при проскальзывании и элементах кинематической цепи.
Цель изобретения - создание револьверного суппорта с повышен0ной точностью обработки и расширенными технологическими возможностями путем повышения точности позиционирования револьверной головки.
Поставленная цель достигается
5 тем, что выдвижной упор снабжен консольным упругим участком в месте крепления эксцентричной части,, а внутри упора расположен стержень, жестко связанный с ним: одной сторо0ной с упругой частью, а другой черкез упругий пластинчатый передаточный элемент, взаимодействующий с датчиком управления муфтой круговой рабочей подачи револьверной головки.
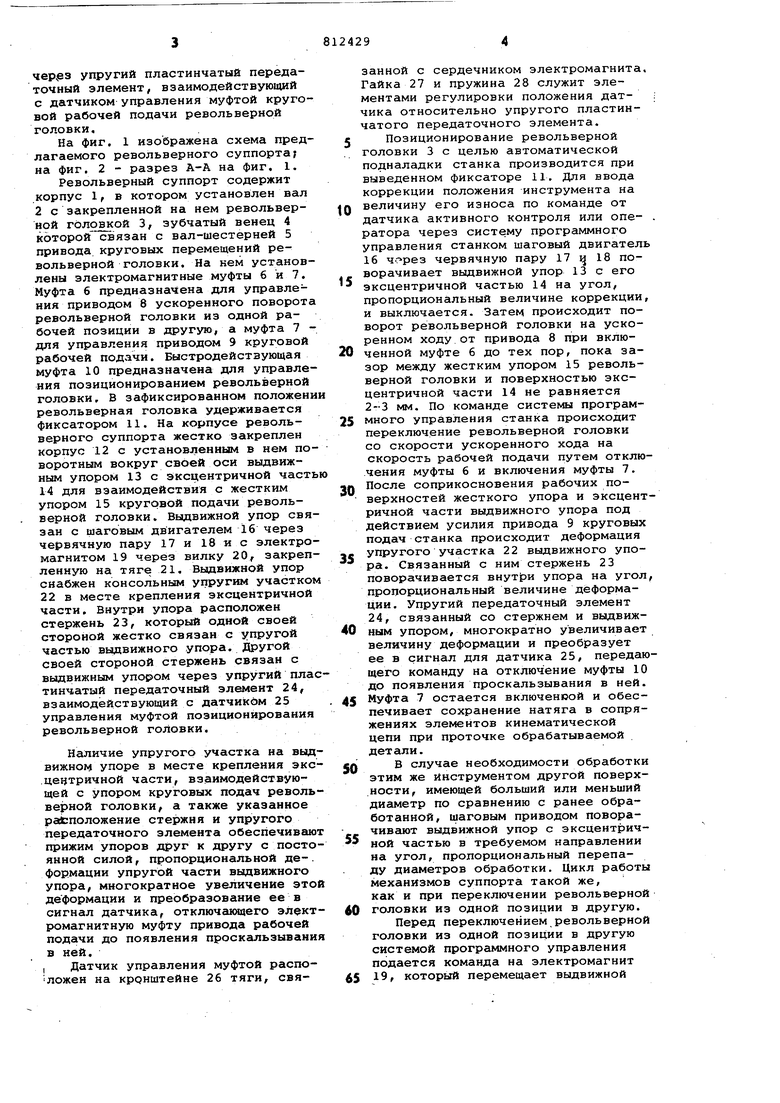
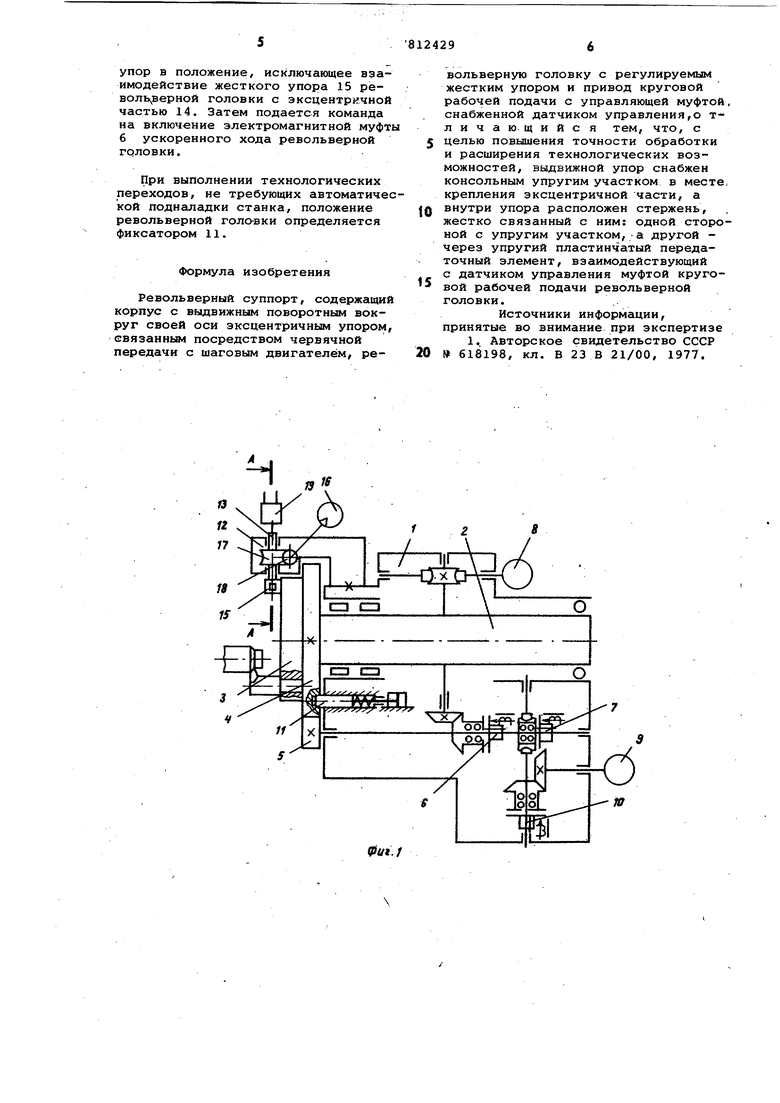
На фиг. 1 изображена схема предлагаемого револьверного суппорта; на фиг, 2 - разрез А-А на фиг. 1.
Револьверный суппорт содержит корпус 1, в котором установлен вал 2 с закрепленной на нем револьверной голош ой 3, зубчатый венец 4 которой связан с вал-шестерней 5 привода круговых перемещений револьверной головки. На нем установлены электромагнитные муфты 6 и 7. Муфта 6 предназначена для управления приводом 8 ускоренного поворота револьверной головки из одной рабочей позиции в другую, а муфта 7 для управления приводом 9 круговой рабочей подачи. Быстродействующая муфта 10 предназначена для управления позиционированием револьверной головки. В зафиксированном положени револьверная головка удерживается фиксатором 11. На корпусе револьверного суппорта жестко закреплен корпус 12 с установленным в нем поворотным вокруг своей оси выдвижным упором 13 с эксцентричной часть 14 для взаимодействия с жестким упором 15 круговой подачи револьверной головки. Выдвижной упор связан с иааговым двигателем 16 через червячную пару 17 и 18 и с электромагнитом 19 через вилку 20, закрепленную на тяге 21. Выдвижной упор снабжен консольным упругим участком 22 в месте крепления эксцентричной части. Внутри упора расположен стержень 23, который одной своей стороной жестко связан с упругой частью выдвижного упора. Другой своей стороной стержень связан с выдвижным упором через упругий пластинчатый передаточный элемент 24, взаимодействующий с датчикам 25 управления муфтой позиционирования револьверной головки.
Наличие упругого участка на выдвижном упоре в месте крепления эксцентричной части, взаимодействующей с упором круговых подач револьверной головки, а также указанное ра Сположение стержня и упругого передаточного элемента обеспечивают прижим упоров друг к другу с постоянной силой, пропорциональной де-. формации упругой части выдвижного упора, многократное увеличение этой деформации и преобразование ее в сигнал датчика, отключающего электЕюмагнитную муфту привода рабочей подачи до появления проскальзывания в ней.
I Датчик управления муфтой расположен на кронштейне 26 тяги, связанной с сердечником электромагнита Гайка 27 и пружина 28 служит элементами регулировки положения датчика относительно упругого пластинчатого передаточного элемента.
Позиционирование револьверной головки 3 с целью автоматической подналадки станка производится при выведенном фиксаторе 11. Для ввода коррекции положения инструмента на величину его износа по команде от датчика активного контроля или oneратора через систему программного управления станком шаговый двигател 16 ч. червячную пару 17 ij 18 поворачивает вьщвижной упор 13 с его эксцентричной частью 14 на угол, пропорциональный величине коррекции и выключается. Затем происходит поворот револьверной головки на ускоренном ходу от привода 8 при включенной муфте 6 до тех пор, пока зазор между жестким упором 15 револьверной головки и поверхностью эксцентричной части 14 не равняется 2-3 мм. По команде системы программного управления станка происходит переключение револьверной головки со скорости ускоренного хода на скорость рабочей подачи путем отклю.чения муфты 6 и включения муфты 7. После соприкосновения рабочих поверхностей жесткого упора и эксцентричной части выдвижного упора под действием усилия привода 9 круговых подач станка происходит деформация упругого участка 22 выдвижного упора. Связанный с ним стержень 23 поворачивается внутри упора на угол пропорциональный величине деформации. Упругий передаточный элемент 24, связанный со стержнем и выдвижным упором, многократно увеличивает величину деформации и преобразует ее в сигнал для датчика 25, передающего команду на отключение муфты 10 до появления проскальзывания в ней. Муфта 7 остается включенюой и обеспечивает сохранение натяга в сопряжениях элементов кинематической цепи при проточке обрабатываемой детали.
В случае необходимости обработки этим же Инструментом другой поверхности, имеющей больший или меньший диаметр по сравнению с ранее обработанной, шаговым приводом поворачивгиот выдвижной упор с эксцентричной частью в требуемом направлении на угол, пропорциональный перепаду диаметров обработки. Цикл работы механизмов суппорта такой же, как и при переключении револьверной головки из одной позиции в другую.
Перед переключением револьверной головки из одной позиции в другую системой программного управления подается команда на электромагнит 19, который перемещает выдвижной
упор в положение, исключающее взаимодействие жесткого упора 15 револьдверной головки с эксцентри.чной частью 14. Затем подается команда на включение электромагнитной муфты 6 ускоренного хода револьверной головки.
При выполнении технологических переходов, не требующих автоматической подналадки станка, положение револьверной голо-вки определяется фиксатором 11.
Формула изобретения
Револьверный суппорт, содержащий корпус с выдвижным поворотным вокруг своей оси эксцентричным упором, связанным посредством червячной передачи с шаговым двигателем, револьверную головку с регулируемым жестким упором и привод круговой рабочей подачи с управляющей муфтой, снабженной датчиком управления,о тличающийс я тем, что, с 5 целью повышения точности обработки и расширения технологических возможностей, выдвижной упор снабжен консольным упругим участком в месте, крепления эксцентричной части, а внутри упора расположен стержень,
0 жестко связанный с ним: одной стороной с упругим участком, а другой через упругий пластинчатый передаточный элемент, взаимодействующий с датчиком управления муфтой круго5вой рабочей подачи револьверной головки.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР
0 618198, кл. В 23 В 21/00, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Револьверный суппорт | 1980 |
|
SU884868A1 |
| Револьверный суппорт | 1979 |
|
SU812430A1 |
| Револьверный суппорт | 1977 |
|
SU618198A1 |
| Н. Ф. Г. Г. Гессе и Г. Т. Чернышев | 1967 |
|
SU192589A1 |
| Револьверный суппорт | 1982 |
|
SU1111849A1 |
| Револьверный суппорт автоматизированного токарно-револьверного станка | 1974 |
|
SU519285A1 |
| Зубофрезерный станок | 1977 |
|
SU864692A1 |
| Токарно-револьверный суппорт | 1976 |
|
SU582913A1 |
| НАЯ Н. Н. Рулев, В. П. Солошенко и А. Р. Зеленчуков /Г'У?'--^- -...,,,.,.:' !---^-н;--А??;:^Е:.ШСпециальное конструкторское оюро при Рязанском станкозаводе' • :";,;^;,]Г)-.--,^г , | 1971 |
|
SU290788A1 |
| Револьверный суппорт | 1981 |
|
SU1024158A1 |
jylS
ШШ, J
Фиг. / IS 22 фиг. г 7
