Изобретение относится к робототехнике и может быть использовано при создании адаптивных роботов-манипуляторов.
Цель изобретения - улучшение эксплуатационных характеристик за счет уменьше- ния энергозатрат и увеличение срока службы устройства путем уменьшения количества изгибов траектории.
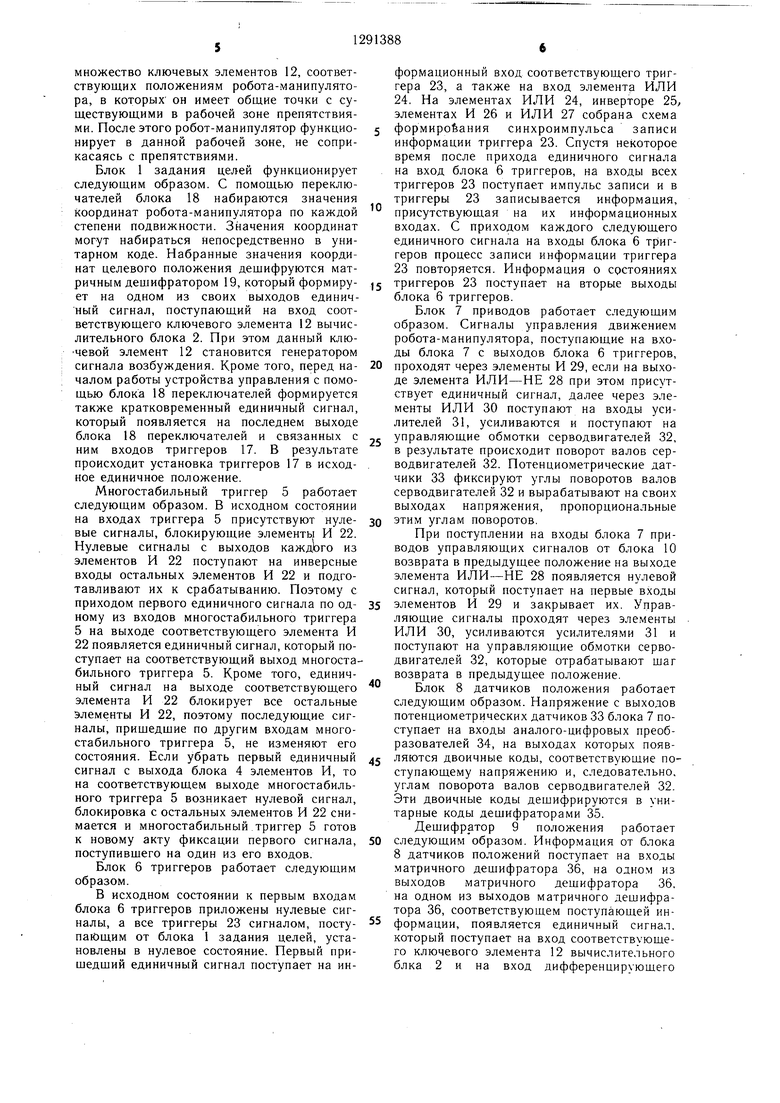
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - схема блока задания целей; на фиг. 3 - схема блока И, на фиг. 4 - схема многостабильного триггера; на фиг. 5 - схема блока триггеров; на фиг. 6 - схема блока приводов; на фиг. 7 - схема блока датчиков положений; на фиг. 8 - схема дешифра- тора положения; на фиг. 9 - схема блока возврата в предыдущее положение; на фиг. 10 - схема блока тактильных датчиков.
Устройство содержит блок 1 задания целей, вычислительный блок 2, блок 3 эле- ментов ИЛИ, блок 4 элементов И, многостабильный триггер 5; блок 6 триггеров, блок 7 приводов, блок 8 датчиков положения, дешифратор 9 положения, блок 10 возврата в предыдуш.ее положение, блок 11 тактиль- ,ных датчиков, ключевые элементы 12; элементы ИЛИ 13, элементы И 14, элементы И 15, элементы И 16, триггеры 17, блок 18 переключателей, дешифратор 19, элементы И-НЕ 20, элементы И 21, элементы И 22, триггеры 23, элементы ИЛИ 24, инвер- тор 25, элемент И 26, элементы ИЛИ 27. элемент ИЛИ-НЕ 28, элементы И 29 элементы ИЛИ 30, усилители 31, серводвигатели 32; потенциометрические потенциометры 33, аналого-цифровые преобразователи 34, дешифраторы 35, дешифратор 36, диф- ференцирующие элементы 37, элемент ИЛИ 38, триггеры 39, триггер 40, элементы И 41, элементы ИЛИ 42, тактильные датчики 43, элемент ИЛИ 44.
Устройство для управления адаптивным роботом-манипулятором работает следую- щим образом.
Перед началом работы всего устройства на выходе блока 1 задания целей появляется кратковременный сигнал, который поступает на входы всех ключевых элемен- тов 12 и устанавливает триггеры 17 этих ключевых элементов 12 в единичное состояние, а также поступает на второй вход блока 6 триггеров и устанавливает все триггеры 17 в нулевое состояние. Перед выполнением каждого элементарного акта дви- жения на выходе дешифратора 9 положения появляется кратковременный запрещаю- Ш.ИЙ сигнал, который поступает на третьи входы элементов И 14 всех ключевых элементов 12 и блокирует их, а также поступает на входы триггеров 39 блока 10 возврата в предыдуш,ее положение и записывает в григгеры 39 координаты текущего положения робота-манипулятора.
Ключевой элемент 12, соответствующий конечному целевому положению робота-манипулятора, выделяется блоком 1 задания целей. При этом последний формирует на информационном четвертом входе ключевого элемента 12 единичный сигнал, в результате чего данный ключевой элемент 12 становится генератором сигнала возбуждения, который поступает на логические входы 2ш соседних ключевых элементов 12 после снятия общего запрещающего сигнала с второго выхода дещифратора 9 положения.
Дешифратор 9 положения формирует на основе информации поступающий от блока 8 датчиков положения единичный сигнал на втором входе того ключевого элемента 12, который соответствует текущему положению робота-манипулятора. При этом элементы И 15 данного ключевого элемента 12 способны пропускать, сигналы, приходящие на входы ключевого элемента 12 через соответствующие элементы ИЛИ блока 3 на входы блока 4 элементов И.
Такая организация вычислительного блока 2 приводит к тому, что после окончания общего запрещающего сигнала ключевой элемент 12, соответствующий конечному положению робота-манипулятора, начинает передавать на логические входы соседних ключевых элементов 12 сигнал возбуждения, который,распространяясь по ключевым элементам 12, достигает логические входы ключевого элемента 12, соответствующего текущему положению робота-манипулятора. Очевидно, что первым на одном из логических входов этого ключевого э.темента 12 появляется тот сигнал, который прошел по кратчайшему пути от генерирующего ключевого элемента 12. Пройдя через один из элементов И 15 ключевого элемента 12, соответствующего текущему положению робота-манипулятора, и соответствующий элемент или блока 3 этот сигнал поступает на вход блока 4 элементов И.
Блок 4 элементов И формирует приоритет по одной из степеней подвижности робота-манипулятора. В первый такт работы всего устройства управления на входы элементов 20 блока 4 поступают нулевые сигналы с выходов триггеров 23 блока 6 и закрывают их, при этом единичные сигналы с выходов элементов И-НЕ 20 поступают на входы элементов И 21 и подготавливают их к работе. В этом случае любой первый единичный сигнал, пришедший от вычислительного блока 2, открывает соответствующий элемент И 21 блока 4 и поступает на вход многостабильного триггера 5, устанавливая его в состояние, соответствующее направлению, со стороны которого пришел первый сигнал возбуждения.Последующие сигналы, приходящие на другие входы многостабильного триггера 5 не по кратчайшему пути, состояние многостабильного триггера 5 не изменяют.
В последущие такты работы на вход одного из элементов И-НЕ 20 подается единичный сигнал, который соответствует признаку приоритета по данной координате подвижности робота-манипулятора. По- ка отсутствует единичный сигнал от вычислительного блока 2 на входе блока 4, все элементы - И-НЕ 20 блока 4 закрыты и единичные сигналы с их выходов поданы на все элементы И 21. Если единичный сигнал от вычислительного блока 2 первым приходит по направлению, имеющему признак приоритета, то он на выходе соответствующего элемента И-НЕ 20 формирует нулевой сигнал, который блокирует элементы И 21 по остальным направлениям движения и многостабильный триггер 5 срабатывает только по направлению, имеющему признак приоритета. Если от вычислительного блока 2 пришли одновременно два единичных сигнала, один из которых по приоритетному направлению или даже по направлению, имеющему признак приоритета в силу ряда причин прищел несколько позже (например, вследствие явления «гонок в вычислительном блоке 2), то блокировать остальные направления, не имеющие призна- ка приоритета, сразу не удается, сигнал другого направления проходит на вход многостабильного триггера 5 и перебрасывает его на новое направление. Однако, через время срабатывания элемента И-НЕ 20 направление с признаком приоритета бло- кирует остальные элементы И 21, единичный сигнал, уже изменивший состояние многостабильного триггера 5, исчезает, многостабильный триггер 5 возвращается в исходное состояние и теперь уже его в состояние, соответствующее приоритетному направле- нию, устанавливает единичный сигнал, пришедший по направлению, имеющему признак приоритета. Если от вычислительного бло- ка 2 приходят сигналы по направлениям, не имеющим признака .приоритета, то они, не блокируя других направлений, поступают на вход многостабильного триггера 5, который переходит в состояние, соответствующее направлению прихода первого из этих сигналов, а признак приоритета в блоке 6 триггеров переписывается на.это новое на- правление движения.
Таким образом, путь первого сигнала с учетом признака приоритета является воспроизводимой в вычислительном блоке 2 моделью кратчайщего пути от текущего положения робота-манипулятора к целевому. Фиксация первого сигнала соответствует акг ту принятия решения, заключающегося в выборе того направления, в котором нужно совершать перемещение роботу-манипулятору с тем, чтобы по кратчайщему пути достичь конечное целевое положение. При этом использование признака приоритета позволяет не допускать излищнего количест
0
5 s 0 5 0 5 5
0
5
ва изгибов траектории при движении робота-манипулятора.
Состояние многостабильного триггера 5 сохраняется до тех пор, пока приводы блока 7 не отработают элементарного шага движения. Окончание элементарного шага движения фиксируется блоком 8 датчиков положений. При этом информация о текущем положении робота-манипулятора от блока 8 датчиков положений запоминается в блоке
10возврата в предыдущее положение, а дешифратор 9 положения выбирает следующий ключевой элемент 12, соответствующий новому текущему положению робота-манипулятора, и вырабатывает кратковременный запрещающий сигнал на своем втором выходе, тем самым блокируя всю логическую сеть ключевых элементов 12. Многостабильный триггер 5 при этом возвращается в исходное состояние, и все указанные операции повторяются до тех пор, пока робот-манипулятор не достигнет конечного положения.
В том случае, если при перемеи ени робота-манипулятора происходит соприкосновение с препятствием, то один из тактильных датчиков 43, который соприкоснулся с препятствием, вырабатывает сигнал, который поступает на первый вход вычислительного блока 2 и на третий вход блока 10 возврата в предыдущее положение. В вычислительном блоке 2 в ключевом элементе 12, соответствующем текущему положению робота-манипулятора, на вход триггера 17 подается сигнал, в результате чего последний переводится в нулевое состояние и своим нулевым сигналом блокирует элемент И 14. При этом ключевой элемент 12 переходит в заблокированное состояние. Одновременно по сигналу блока
11тактильных датчиков срабатывает блок 10 возврата в предыдущее положение и вырабатывает на основе ранее запомненной информации сигналы, которые, поступая на блок 7 приводов, возвращают робот-манипуляторов в предыдущее положение.
Окончание отработки элементарного шага возврата также фиксируется блоком 8 датчиков положения и, следовательно, дешифратора 9 положения, который вырабатывает запрещающий сигнал на своем втором выходе и тем самым прекращает работу блока 10 возврата в предыдущее положение.
После этого процедура моделирования кратчайщего пути, выделения первого шага и отработка его блоком 7 приводов возобновляется, но уже при условии, что ключевой элемент 12, соответствующий положению робота-манипулятора, в котором он соприкасается с данной точкой препятствия, блокируется и не участвует в процессе моделирования кратчайщего пути. После некоторого времени функционирования в результате соприкосновений робота-манипулятора с препятствиями заблокировано некоторое
множество ключевых элементов 12, соответствующих положениям робота-манипулятора, в которых он имеет общие точки с существующими в рабочей зоне препятствиями. После этого робот-манипулятор функционирует в данной рабочей зоне, не соприкасаясь с препятствиями.
Блок 1 задания целей функционирует следующим образом. С помощью переключателей блока 18 набираются значения координат робота-манипулятора по каждой степени подвижности. Значения координат могут набираться непосредственно в унитарном коде. Набранные значения координат целевого положения дешифруются матричным дешифратором 19, который формирует на одном из своих выходов единич- ный сигнал, поступающий на вход соответствующего ключевого элемента 12 вычислительного блока 2. При этом данный клю- чевой элемент 12 становится генератором сигнала возбуждения. Кроме того, перед началом работы устройства управления с помощью блока 18 переключателей формируется также кратковременный единичный сигнал, который появляется на последнем выходе блока 18 переключателей и связанных с ним входов триггеров 17. В результате происходит установка триггеров 17 в исходное единичное положение.
Многостабильный триггер 5 работает следующим образом. В исходном состоянии на входах триггера 5 присутствуют нулевые сигналы, блокирующие элементы И 22. Нулевые сигналы с выходов каждого из элементов И 22 поступают на инверсные входы остальных элементов И 22 и подготавливают их к срабатыванию. Поэтому с приходом первого единичного сигнала по одному из входов многостабильного триггера 5 на выходе соответствующего элемента И 22 появляется единичный сигнал, который поступает на соответствующий выход многостабильного триггера 5. Кроме того, единичный сигнал на выходе соответствующего элемента И 22 блокирует все остальные элементы И 22, поэтому последующие сигналы, прищедшие по другим входам многостабильного триггера 5, не изменяют его состояния. Если убрать первый единичный сигнал с выхода блока 4 элементов И, то на соответствующем выходе многостабильного триггера 5 возникает нулевой сигнал, блокировка с остальных элементов И 22 снимается и многостабильный триггер 5 готов к новому акту фиксации первого сигнала, поступившего на один из его входов.
Блок 6 триггеров работает следующим образом.
В исходном состоянии к первым входам блока 6 триггеров приложены нулевые сигналы, а все триггеры 23 сигналом, поступающим от блока 1 задания целей, установлены в нулевое состояние. Первый пришедший единичный сигнал поступает на информационный вход соответствующего триггера 23, а также на вход элемента ИЛИ 24. На элементах ИЛИ 24, инверторе 25, элементах И 26 и ИЛИ 27 собрана схема
формирования синхроимпульса записи информации триггера 23. Спустя некоторое время после прихода единичного сигнала на вход блока 6 триггеров, на входы всех триггеров 23 поступает импульс записи и в триггеры 23 записывается информация, присутствующая на их информационных входах. С приходом каждого следующего единичного сигнала на входы блока 6 триггеров процесс записи информации триггера 23 повторяется. Информация о состояниях
триггеров 23 поступает на вторые выходы блока 6 триггеров.
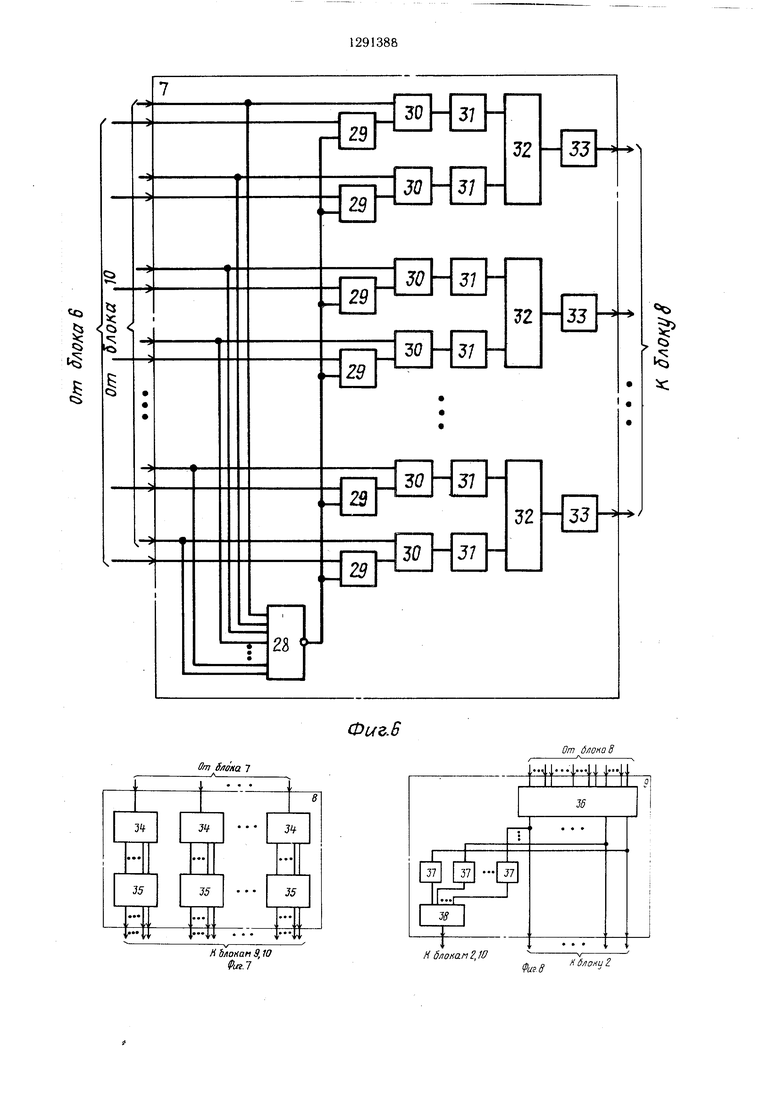
Блок 7 приводов работает следующим образом. Сигналы управления движением робота-манипулятора, поступающие на входы блока 7 с выходов блока б триггеров,
проходят через элементы И 29, если на выходе элемента ИЛИ-НЕ 28 при этом присутствует единичный сигнал, далее через элементы ИЛИ 30 поступают на входы усилителей 31, усиливаются и поступают на
управляющие обмотки серводвигателей 32, в результате происходит поворот валов серводвигателей 32. Потенциометрические датчики 33 фиксируют углы поворотов валов серводвигателей 32 и вырабатывают на своих выходах напряжения, пропорциональные
этим углам поворотов.
При поступлении на входы блока 7 приводов управляющих сигналов от блока 10 возврата в предыдущее положение на выходе элемента ИЛИ-НЕ 28 появляется нулевой сигнал, который поступает на первые входы
элементов И 29 и закрывает их. Управляющие сигналы проходят через элементы ИЛИ 30, усиливаются усилителями 31 и поступают на управляющие обмотки серводвигателей 32, которые отрабатывают шаг возврата в предыдущее положение.
Блок 8 датчиков положения работает следующим образом. Напряжение с выходов потенциометрических датчиков 33 блока 7 поступает на входы аналого-цифровых преобразователей 34, на выходах которых появляются двоичные коды, соответствующие поступающему напряжению и, следовате.пьно, углам поворота валов серводвигателей 32. Эти двоичные коды дешифрируются в унитарные коды дешифраторами 35.
Дешифратор 9 положения работает
следующим образом. Информация от блока 8 датчиков положений поступает на входы матричного дешифратора 36, на одном из выходов матричного дешифратора 36. на одном из выходов матричного дешифратора 36, соответствующем поступающей информации, появляется единичный сигнал, который поступает на вход соответствующего ключевого элемента 12 вычислительного блка 2 и на вход дифференцирующего
элемента 37, который формирует кратковременный сигнал, поступающий через элемент ИЛИ 38 на входы ключевых элементов 12 и на соответствующий вход блока 10 возврата в предыдущее положение.
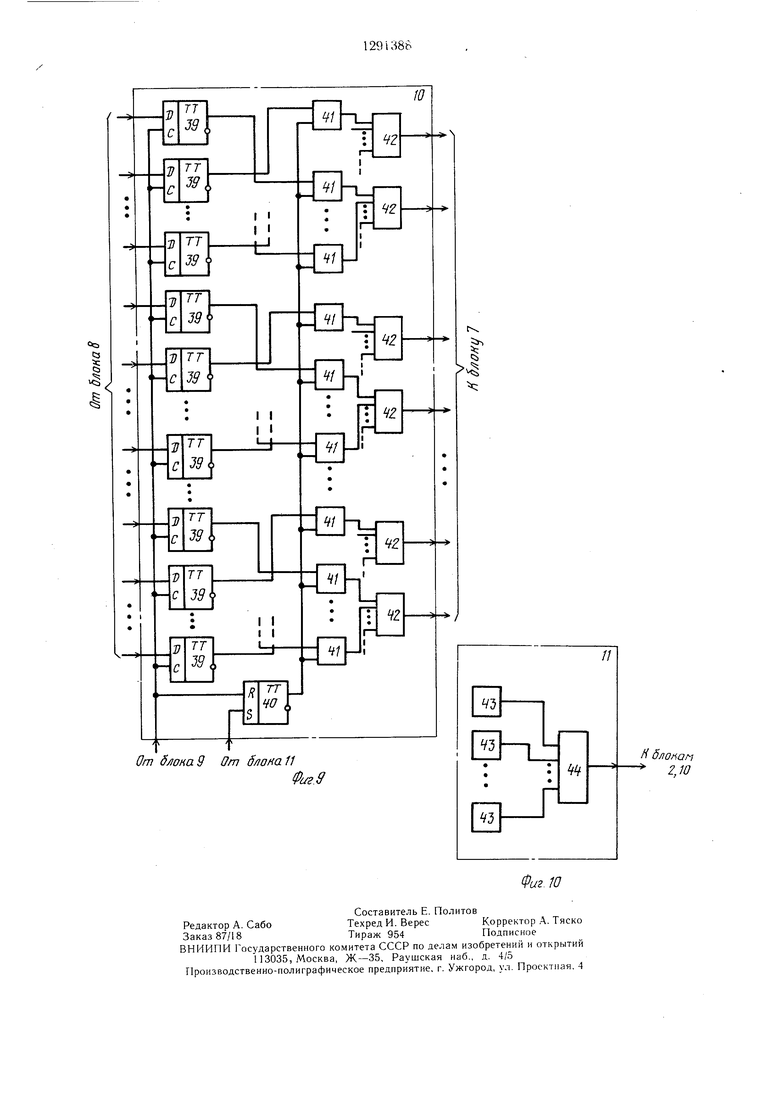
Блок 10 возврата в предыдущее положение работает следующим образом. Сигналы, поступающие на входы блока 10 от выходов блока 8 датчиков положений, проходят на информационные входы соответствующих триггеров 39. Поэтому с приходом кратковременного импульса с второго выхода дещифратора 9 положения, поступающего на входы триггеров 39, в триггеры 39 записывается код текущего положения робота-манипулятора. Кроме того, по сигналу на соответствующем входе блока 10, поступающему с выхода дещифратора 9 положения, триггер 40 устанавливается в нулевое состояние. Нулевой сигнал на выходе триггера 40 закрывает элементы И 41. Если робот-манипулятор соприкоснулся с препятствием, то единичный сигнал с выхода блока 11 тактильных датчиков поступает на вход блока 10 и устанавливает триггер 40 в единичное состояние. При этом элементы И 41 открываются и информация, записанная в триггерах 39 проходит на выходы элементов И 41, через соответствующие элементы ИЛИ 42 - на выходы блока 10 и далее на входы бока 7 приводов. При этом за счет «переноса связей между триггерами 39 и элементами И 41 на выходах блока 10 формируется код направления движения робота-манипулятора, обратный записанному в триггерах 39.
Блок 11 тактильных датчиков работает следующим образом. При соприкосновении подвижной части робота-манипулятора, на которой расположены тактильные датчики 43 с препятствием на выходе одного из тактильных датчиков 43 появляется единичный сигнал, который поступает на вход элемента ИЛИ 44, а затем на выход блока 11 тактильных датчиков. Единичный сигнал блока 11 тактильных датчиков поступает на первый вход блока 10 возврата в предыдущее положение и на первый вход вычислительного блока 2.
Формула изобретения
1. Устройство для управления адаптивным роботом-манипулятором, содержащее многостабильный триггер, блок задания целей, первые и второй выходы которого соединены с соответствующими входами вычислительного блока, подключенного
третьим входом к первому входу блока возврата в предыдущее положение и первому выходу дещифратора положения, четвертыми входами к вторым выходам де- 5 щифратора положения, пятым входом к второму входу блока возврата в предыдущее положение и к выходу блока тактильных датчиков, а выходами к соответствующим входам блока элементов ИЛИ, блок приводов, выходы которого соединены с соответствующими входами блока датчиков положения, а первые входы - с соответствующими выходами блока возврата в предыдущее положение, соединенного третьими входами с соответствующими входа5 ми дещифратора положения и соответствующими входами блока датчиков положения, отличающееся тем, что, с целью улучщения эксплуатационных характеристик устройства за счет снижения энергозатрат и повышения срока службы, устройство содержит
0 блок триггеров и блок элементов И, первые входы которого соединены с выходами блока элементов ИЛИ, вторые входы - с первыми выходами блока триггеров, а выходы - с входами многостабильного триг5 гера, подключенного выходами с первыми входами блока триггеров, второй вход которого соединен с вторым выходом блока задания целей, а вторые выходы - с вторыми входами блока приводов.
2.Устройство по п. 1, отличающееся тем, 0 что блок элементов И содержит первые
элементы И и элементы И-НЕ, первый и второй входы каждого из которых соединены с соответствующим первым и вторым входом блока элементов И, а выход - с соответствующим первым входом первых элементов И, каждый из которых подключен вторым входом к соответствующему первому входу блока элементов И, а выходом к соответствующему выходу блока элементов И.
3.Устройство по п. 1, отличающееся тем, что блок триггеров содержит- последовательно соединенные первый элемент ИЛИ, инвертор, второй элемент И и второй элемент ИЛИ, а также триггеры, первый вход каждого из которых подключен к соответствую5 Щим первому входу и второму выходу блока триггеров и соответствующему входу первого элемента ИЛИ, второй вход - к выходу второго элемента ИЛИ, а выход - к соответствующему первому выходу блока триггеров, соединенного вторым входом с вто0 рым входом второго элемента ИЛИ, а выход первого элемента ИЛИ подключен к второму входу второго элемента И.
0
.Н bflOHijl
Н длояам2б
Ci
сз
I
I 77{Г
От Злака
От блона J
А
Н 6/ioi Lj 5
fej
От 5лока 5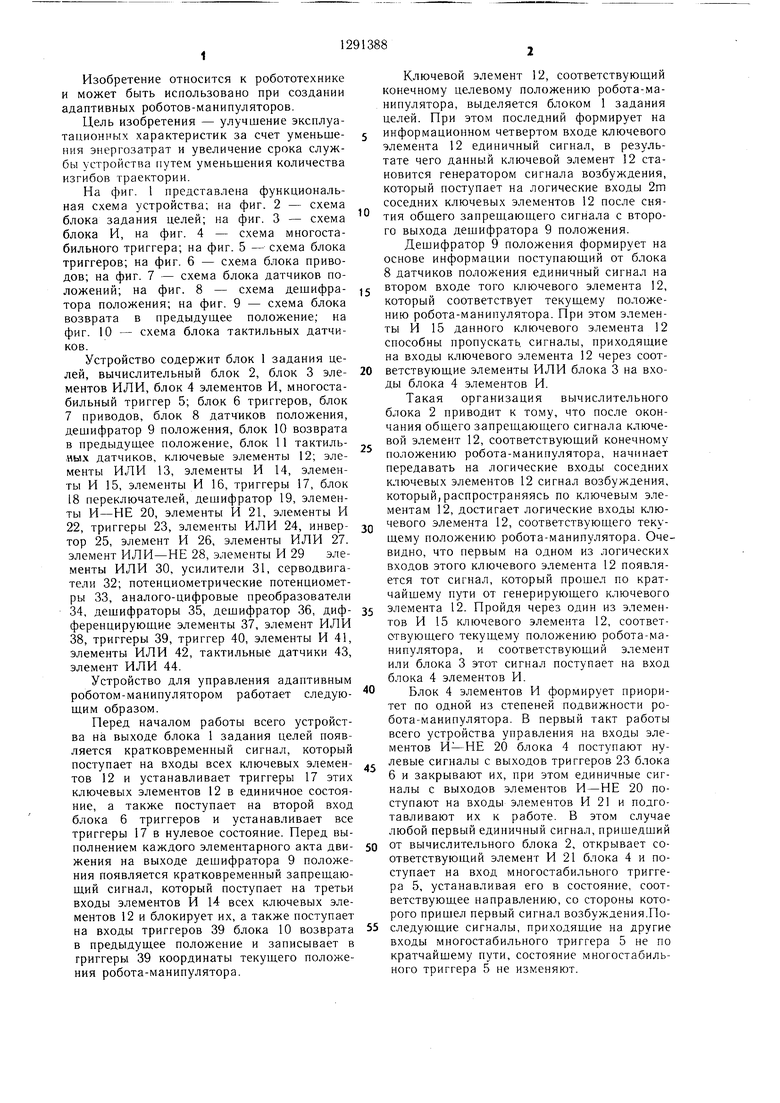

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU849142A1 |
| Устройство для управления адаптивным роботом | 1985 |
|
SU1252755A1 |
| Устройство для управления адаптив-НыМ РОбОТОМ-МАНипуляТОРОМ | 1979 |
|
SU812561A2 |
| Устройство для управления конвейером | 1982 |
|
SU1082714A1 |
| Устройство управления укладчиком листового стекла | 1988 |
|
SU1551664A1 |
| Устройство для управления робототизированным комплексом | 1985 |
|
SU1278203A1 |
| Устройство для программного управления | 1985 |
|
SU1267362A2 |
| Устройство для моделирования робота-манипулятора | 1987 |
|
SU1441414A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |

Изобретение относится к робототехнике и может быть использовано при создании адаптивных роботов. Целью изобретения является улучшение эксплуатационных характеристик устройства за счет снижения энергозатрат и повышения срока службы. Устройство содержит блок элементов И, выполненный с помош,ью элементов И- НЕ и элементов И, и блок триггеров, выполненный с помош,ью триггеров, элементов И, ИЛИ и инвертора, блок задания целей, вычислительный блок, блок приводов, блок датчиков положений, блок тактильных датчиков и ключевые элементы. 2 з.п. ф-лы, 10 ил. N5 ;о со 00 00
2Z
К 5локу 6 «РигЛ
/С $лок.у 7 Фмг.5
Фиг.6
От блока 7
«Ч
r
l
От блока 8
g If ..-.-41
к Ьлонан 9, Ю Риг.7
Н 5локап2,Ю
Фиг. 8
К блони Z
C3
Ca
§
t
. i
Ч
От длонад От d/iOf a11
Фиг.9
Л блопа/ 2.10
Составитель Е. Политое
Редактор А. СабоТехред И. ВересКорректор А. Тяско
Заказ 87/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
Фиг. W
| Устройство для управления адаптив-НыМ РОбОТОМ-МАНипуляТОРОМ | 1979 |
|
SU812561A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU849142A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
