1
Изобретение относится к роботехнике, в частности к специализированным манипуляторам для автоматизации съема бобин с пряжей.
Известен захват промьшшенного робота,., содержащий связанную с рукой робота внутреннюю штангу, с которой телескопически связана наружная полая штанга, подпружиненная к внутренней штанге, а также привод, датчики и подвижные губки 11.,
Недостатком известного захвата является СЛОЖНОСТЬ конструкции и ниЗКая надежность.
Цель изобретения - упрощение конструкции и повышение надежности.
Эта цель достигается тем, что захват снабжен скобой, внутренняя штанга снабжена фланцами с диэлектрической прокладкой, соединенными посредством шпилек между собой и со скобой, наружная штанга снабжена фланцем имеющим упоры, причем этот фланец размещен на шпильках с возможностью продольного перемещения между фланцем внутренней штанги и скобой и подпружинен к ним а датчики размещены на фланце внутренней штанги и на скобе и контактируют с упорами наружной штанги.
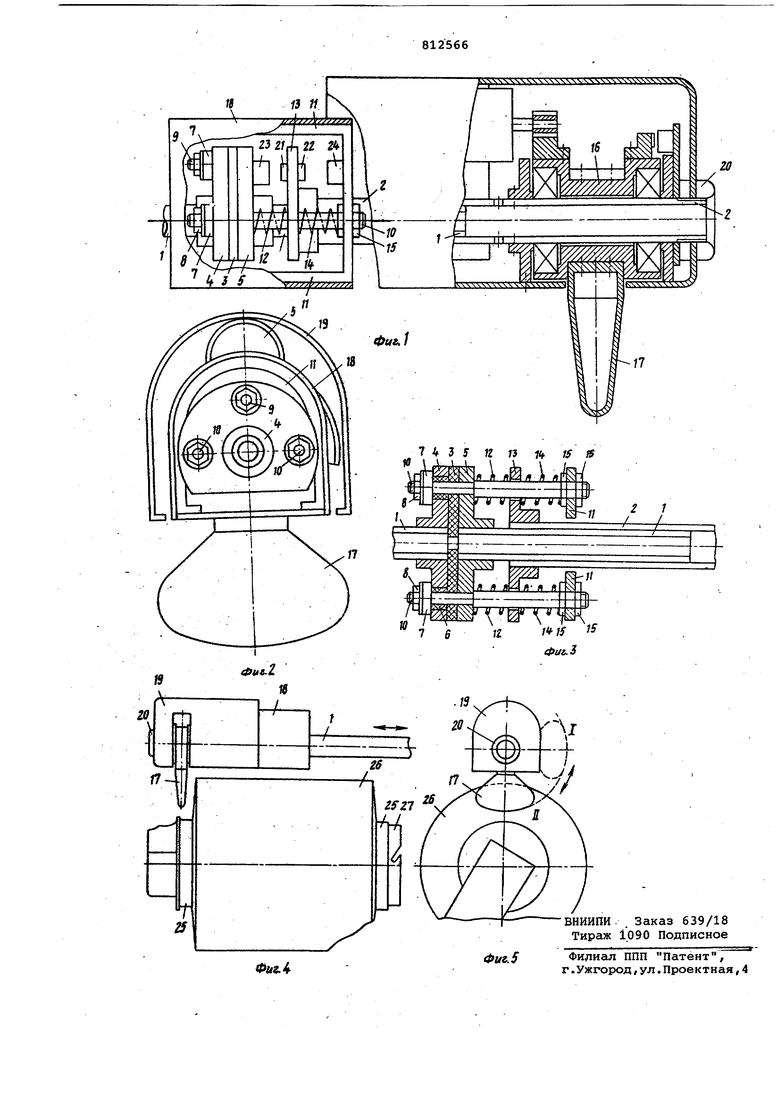
На фиг. 1 схематически изобраикен предлагаемый захват, продольный раз- рез; на фиг. 2 - то же, вид слева; на фиг. 3 - узел фланцев и пружин; на фиг. 4 - захват в рабочем положении; на фиг. 5 - то же,вид слева. Захват содержит связанную с рукой робота (не показан) внутреннюю штангу 1, с которой телескопически
o связана полая и наружная штанга 2, расположенная вдоль оси первой, причем первая штанга 1 с помо«цыр диэлектрической прокладки 3 разделена на ве части, скрепленные между
5 собой с помощью первого 4 и второго 5фланцев, изоляционных втулок б, шайб 7, гаек 8, шпильки 9 и удлиненных шпилек 10, на концах KOTOF IX установлена скоба 11. Меящу скобой
0 и фланцем 5 на удлинение шпильки 10 надеты йружины 12, третий фланец 13 и пружины 14. Скоба 11-крепится гайками 15 с помощью кото1 лх регулируется сжатие пружин 12, 14. Фланец
5 13 жестко закреплен на одном конце штанги 2, на другом конце которой расположен привод 16 подвижных губок 17.
Кожух 18 узла фланцев и пружин
0 закреплен на скобе 11. Кожух 19
привода 16 подвижных губок 17 свобоно посажен на конец штанги 2 и крепится гййкой 20. На фланце 13 размещены упоры 21 и 22, взаимодействующие с датчиками 23 и 24, закрепленные соответственно на фланце 5 и скобе 11. Захват предназначен для стягивания бобин 25 с пряжей 26.
Устройство работает следующим образом.
В исходном положении губка 17 развернута и расположена горизонтално (фиг. 5, положение I). Рука манипулятора выдвигается, и губка 17 поворачивается с помощью привода
16в положение II (фиг. 5). После этого включается привод стягивания (не показан) перемещающий штангу 1 по горизонтали вправо (фиг. 4). Губ
17входит в соприкосновение с пряжей 26, и пружины 14 частично сжимгштся смягчая касание. При усилии от 1 до 3 кг бобина 25 с пряжей 26 стягивается с бобинодержателя 27 на транспортирующее устройство или руку манипулятора. Таким образом стягивается подавляющее количество бобин. Если намотчик забыл расфиксировать бобину или бобина заклинилась, то в этом случае развивается у ;илие около 10 кг,, пружина 14 сжимается, срабатывает датчик 24 и подает сигнал в блок управления
(не показан). Блок управления отводит захват и переводит манипулятор на следующее рабочее место, оставляя бобину не снятой.
При сталкивании бобины с руки манипулятора на штырь транспортирующего устройства 1не показано) захват работает аналогично описанному за исключением того, что губка заводится за противоположный торец бобины с пряжей и контактирует с пряжей противоположной поверхностью При э&м сжимаются пружины 12 и
в случае заклинивания срабатывает датчик 23. Поскольку штанга 2, губка 17, кожухи 18 и 19 электрически изолированы прокладкой (втулками 6 и шайбами 7 от штанги 1 и, следовательно, от корпуса манипулятора) и соединены проводником (не показан) с входом блока управления, .касание захватом металлических близко расположенных узлов оборудования приводит- к срабатыванию блока управления, останову и подаче соответствующего сигнала. При касании неметаллических предметов при подводе захвата развивается усилие не более 10 кг до срабатывания датчиков 23 и 24.
Формула изобретения
Захват промышленного робота, содержащий связанную с рукой робота внутреннюю штангу, с которой телескопически связана наружная полая штанга, подпружиненная к внутренней штанге, а также привод, датчики и подвижные губки, о т л и ч а -. ю щ и и с я тем, что, с целью упрошения конструкции и повьшения надежности работы, он снабжен скобой, внутренняя штанга снабжена фланцами с диэлектрической прокладкой, соединенными посредством шпилек между собой и со скобой, наружная штанга снабжена фланцем. , имеющим удоры причем этом фланец размещен на шпильках с возможностью продольного перемещения между фланцем внутренней штанги и скобой и подпружинен к ним, а датчики размещены на фланце внутренней штанги и на скобели контакт руют с упорами наружной штанги.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 567600, кл. В 25 J 15/00, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Схват манипулятора | 1987 |
|
SU1537522A1 |
| СОЕДИНИТЕЛЬНАЯ МУФТА ТРУБОПРОВОДОВ С ПРИВОДОМ | 2024 |
|
RU2832372C1 |
| Устройство для очистки горелки сварочного робота | 1987 |
|
SU1433680A1 |
| СБОРОЧНАЯ ГОЛОВКА | 1992 |
|
RU2035285C1 |
| Крепление фланцевого соединения на устье скважины | 2021 |
|
RU2763154C1 |
| СИСТЕМА РОБОТИЗИРОВАННОЙ СБОРКИ КРУПНОГАБАРИТНЫХ ФЕРМ, В ТОМ ЧИСЛЕ НА ОРБИТЕ ЗЕМЛИ ИЛИ ЛУНЕ | 2021 |
|
RU2790311C2 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Схват манипулятора | 1981 |
|
SU1009757A1 |
| ЛЮК-ЛАЗ ТРУБОПРОВОДА | 2009 |
|
RU2424462C2 |