Изобретение относится к нестандартной технологической оснастке для промышленных роботов и может быть применено для оснащения промышленных роботов типа Универсал-5 и с наибольшей эффективностью при усгановке роботов на участке токарных станков с числовым программным управ лением. Известен схват манипулятора, содержащий привод, установленный с во можностью параллельной сходимости штанги, на которых закреплены основные и дополн 1тельные губки с рабочими поверхностями, причем каждая дополнительная губка жестко связана с соответствующей основной губкой Ci.. Целью изобретения является расширение технологически}с возможностей охвата путем обеспечения надежного раздельного зажима детали за ее нару51;ную или внутреннюю поверхность. Цель достигается тем, что в схвате манипулятора, содержащем привод, установленные с возможностью параллельной сходимости штанги, на которых закреплены основные и дополнительные губки с рабочими поверхностями, причем каждая дополнительная губка жестко связана с соответст вующей основной губкой, каждая пара губок закреплена на концах штанг и выполнена из изогнутых упругих пластин, причем направление,изгиба допол нительной губки, закрепленной на одной штанге, соответствует напрарле нию изгиба основной губки, закрепленной на .другой штанге, при их -рабочие поверхности обращены одна к другой. . На фиг.1 изображен общий вид схва та; на фиг.2 - вид А на фиг.1. Схват закреплен на двух штангах 1 манипулятора (привод которых на фи гурах не-показан) и состоит из двуплечих рычагов 2 и 3, закрепленных на каждой штанге 1.. Дтанти 1 установ лены с возможностью параллельной сходимости. На рычагах 2 закреплены основные губки 4, а на рычагах 3 дополнительные губки 5 Рычаги 2 -и 3 выполнены из упругих изогнутых пластин. Направления изгиба каждого рыча га с дополнительной губкой, закрепленного наодной штанге, совпадает с направлением изгиба рычага с основной губкой, закрепленного на другой штанге. Рабочие поверхности губок 5 и 4 обращеныод на к другой. ПлосК.ость зажима губками 4 может быть смещена относительно плоскости зажима губками 5. Схват работает следующим образом. Перед первым установом заготовка подается из накопителя широкой стороной к манипулятору. Схват захватывает заготовку рычагами 2 -с губками 4 и манипулятор переносит ее к первому станку, где производится обработка уплотнительной поверхности фланца и его отверстия. После этой обработки схват подходит к детали той же стороной, что и раньше, снимает /ее и переносит на площадку кантователя, расположенную на накопителе. Опустив деталь на площадку ши-рокой уплотнительной стороной вниз, манипулятор подводит схват к узкой приварной части фланца и вводит в него губки 5. Включением того же рабочего хода, что и при первом захвате, достигается закрепление детали пр внутренней поверхности. Деталь готова к установке на йторой станок для дальнейшей обработки. Аналогично работает схват при снятии готовой детали. Таким образом, захват деталей 6 осуществляется при сведении штанг манипулятора за наружную их поверхность, а при разведении - за их внутреннюю поверхность. Такое выполнение схвата обеспечивает надежное взаимодействие основ-нв х или дополнительных губок соответственно с уплотнительной (больше диаметра) или приварной (меньшего диаметра) частью фланца в зависимости от того, какой именно частью фланец обращен к схвату. При этом зажим фланца как за наружную поверхность его уплотнительной части, так и за внутреннюю поверхность приварной части осуществляется при одном и том же рабочем ходе рычагов манипулято-, ра, к которым прикреплены губки схвата. Поскольку плоскости зажима основных и.дополнительных губок смещены на расстояние, соответствующее ширине их рабочей части, то одновременно фланец может быть зажат только за одну из указанных поверхностей, а .другая при этом остается свободной и может быть использована для закрепления детали в приспособлении станка для ее обработки.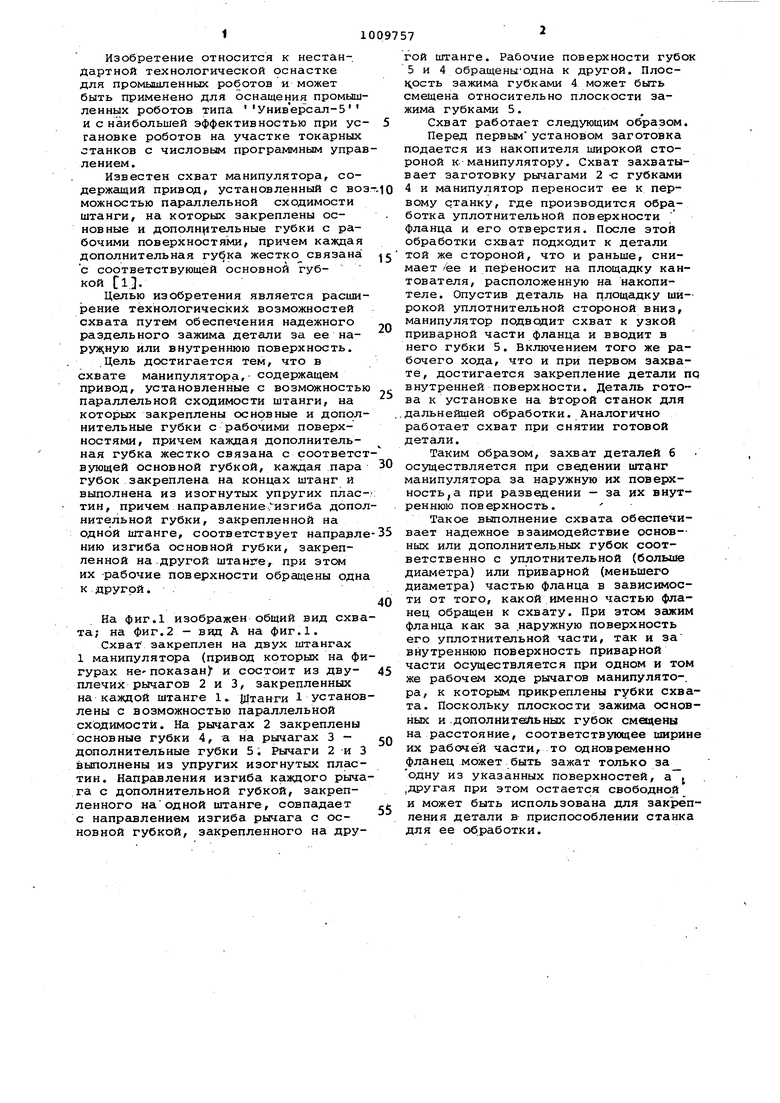
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1978 |
|
SU673448A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Схват | 1987 |
|
SU1407796A1 |
| Схват | 1984 |
|
SU1184663A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| МАНИПУЛЯТОР РОБОТА | 2015 |
|
RU2616317C1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Захватное устройство манипулятора | 1987 |
|
SU1458222A1 |
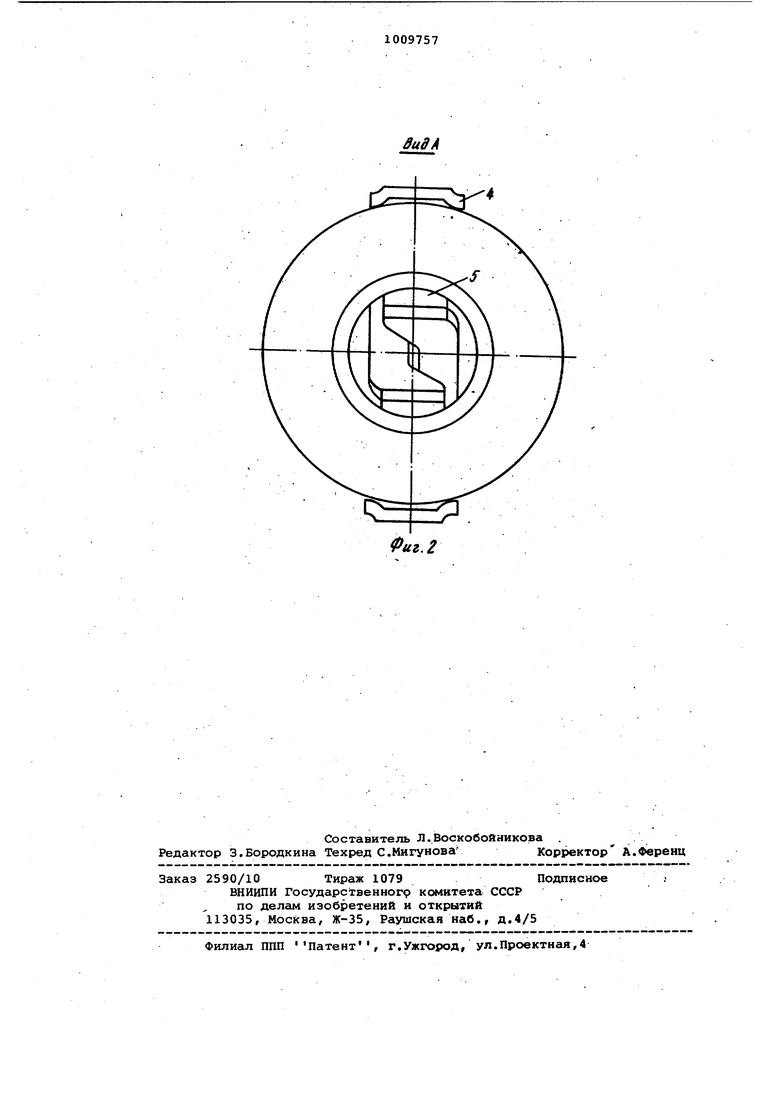
ОХВАТ МАНИПУЛЯТОРА, содержа .щий привод, установленные с возможностью паргшлельной сходимости штанги, на которых закреплены основные и дополнительные ,губки с рабочими поверхносх51ми, причем каждая из дополнительных губок жестко связана с соответствующей основной губкой, о т лич,ающийся т, что, с целью расширения технологических возможностей, каждая пара- губок зак . реплена;на концах штанг и выполнена из.изогнутых упругих пластин, причем Нсшравление изгиба дополнительной губки, закрепленной на опнОй штанге, соответствует Направлению нагиба основной губки, закрекленной на другой штанге, при этом их рабочие поверхности обращены одна к другой. i :о ч1 D1 
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Схват манипулятора | 1977 |
|
SU623734A1 |
