11
Изобретение относится к захватным органам промышленных работов и манипуляторов и может быть использовано в машиностроении для автоматизации загрузочно-разгрузочных работ.
Целью изобретения является повышение надежности работы за счет исключения передачи усилий зажима в момент захвата на руку манипулятора.
На фиг. 1 схематически изображено предлагаемое захватное устройство ..общий вид; на фиг, 2 - то же, вид сбоку на фиг. 3 - кинематическая схема.
Захватное устройство закреплено на корпусе 1 кисти руки промьшшенно го робота (не показан) и предназначено для загрузки (разгрузки) заготовок 2 и удерживания их во время транспортирования по заранее запро.
граммированной траектории,, Захват
вое устройство содерзкит закрепленный на корпусе 1 фланец 3, в который кон сольно встроены направляншще 4. В направляющих 4 подвижно установлены посредством втулок 5 траверсы 6 и 7, К последним прикреплены попарно губки 8 и 9, (О и 11, сужающиеся к периферии. В центральной части с тыльной стороны губки 8 и 9 снабжены прорезями 12, по концам - скошенными упорами 13, а губки 10 и 11 - консольными наклонными держателями 14. На направляющих 4 закреплены упоры 15. Между траверсами 6 и 7 расположе силовой пневмоцилиндр 16, корпус 17 и шток 18 которого соединены посредством шарниров 19 соответственно с траверсами 6 и 7. Подвод воздуха к силовому пневмоцилиндру осуществляется гибкими шлангами 20, Заготов- ка 2 располагается на базирующем элементе 21,
Захватное устройство работает следующим образом.
С помощью робота захватное устрой ство опускает заготовку 2 на базирующий элемент 21. По достижении заготовкой 2 контакта с базирующим элементом 21 по шлангу 20 подается давление в поршневую полость пневмо- цилиндра 16, который размыкается и раздвигает траверсы 6 и 7 до упора
13168
5
;
15
20
30
н- , иен 35
ей--
142
соответственно н упор 15 и фланец 3. Губки 8-11 высвобождают заготовку 2, захватное устройство поднимается вверх. Заготовка 2 подверг ается механической обработке. После окончания мехобработки захватное устройство с разведенными губками 8-11 опускается до уровня захвата заготовки 2. По шлангу 20 подается давление в штоковую полость пневмоцилинд- ра 16, который начинает сдвигать губки 8-11. При касании губок 8 и 9 заготовки 2, последние останавливаются, останавливается также связанный шар- нирно с ним шток 18, а корпус 17 продолжает перемещаться совместно с губками 10 и 11 к заготовке 2, выбирая зазор. При касании губок 10 и 11 заготовки 2 останавливается корпус 17, а шток 18 совместно с губками 8 и 9 перемещается к заготовке 2, выбирая зазор. По достижении плотного контакте скошенньй упор 13 входит под заготовку 2, и губки 8-11 зажимают заготовку 2 усилием пневмоцилиндр.а 16. Губки 8 и 9, имеющие прорези 12, изгибаются и приспосабливаются: к поверхности заготовки 2,
После зажатия заготовки 2 схват поднимается вверх, происходит ротация схвата, подача и опускание его на новую позицию за следующей заготовкой. Обработанная заготовка 2 удерживается в схвате на консольных держателях.
В дальнейшем цикл повторяется. Формула изобретения
Захватное устройство, содержащее корпус, на котором установлена по меньшей мере пара зажимных губок с, приводом в виде силового цилиндра, причем одна из зажимных губок связана посредством шарнира с корпусом, а другая - со штоком силового цилиндра, отличающееся тем, что, с целью повьш1ення надежности работы, оно снабжено жестко закрепленными на корпусе направляющими, на которых установлены зажимные губки с возможностью их взаимодействия с корпусом и с дополнительно введенным упором, закрепленным на направляющих
Х9
фил1
фиГ.Х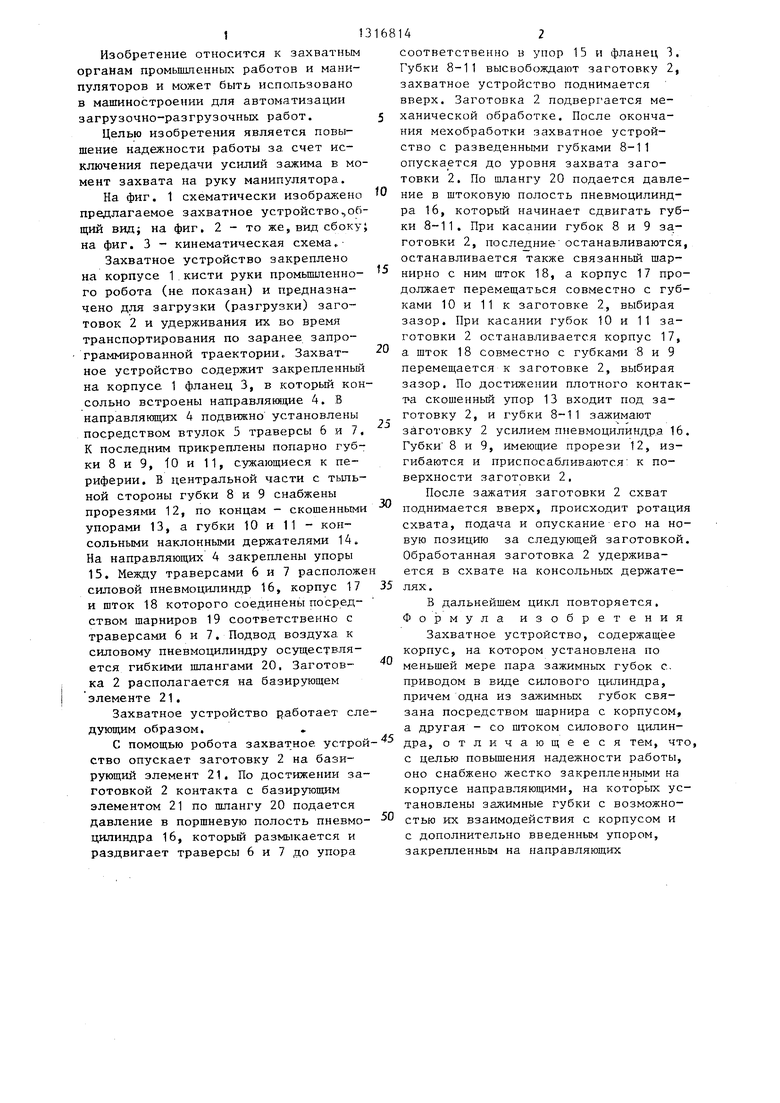
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Захват | 1980 |
|
SU905061A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
| Схват робота | 1982 |
|
SU1024271A1 |
| Схват | 1983 |
|
SU1138313A1 |
Изобретение относится к захват- , ным органам про.мьшшенных манипуляторов и может быть использовано в машиностроении для автоматизации за7« грузочно-разгрузочных работ. Целью изобретения является повышение на- дежности работы за счет исключения передачи усилий зажима в момент захвата на руку манипулятора. Для захвата за-готовки по ишангу 20 подается давление в штоковую полость силового пневМОцилиндра 16, который начинает сдвигать губки. При касании губок 8 и 9 заготовки 2 последние останавливаются, вместе с ними останавливается и шток 18, а корпус 17 продолжает перемещаться вместе с губками 10 и 11 к заготовке 2, выбирая зазор. При разжиме заготовки губки раздвигаются до упора траверс 6 и 7 в упор 15 и фланец 3, 3 ил. (Л
Редактор Э. Слиган
Составитель А. Алексеев
Техред А.Кравчук Корректор А. Зимокосов
Заказ 2387/13Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Грузовая тележка крана | 1980 |
|
SU977364A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
