Изобретение относится к устройствам для выполнения вспомогательных операций, связанных с изменением положения заготовки в пространстве, и может быть использовано в машиностроении и других отраслях промышленности для оснащения роботов и манипуляторов, предназначенных для автоматической передачи цилиндрических заготовок различного диаметра с позиции йа позицию.
Цель изобретения - повышение точности позиционирования и увеличение надежности захвата цилиндрических за- 15 готовок различного диаметра и веса путем повышения жесткости конструк- 4ии, обеспечения независимости регу- :|1ирования захватов.
На фиг. 1 схематически изображен 20 Ыват манипулятора в разрезе, положе- йие со сведенными губками; на фиг.2 - jo же, положение с разведенными губкаiflH .
линдрической направляющей k, а непосредственно на свободном конце этой части штока жестко закреплен наружный захват 9- Внутренний 8 и наружный 9 захваты соединены между собой посредством двух параллельных одна другой горизонтальных штанг 15, одни концы которых зафиксированы с помощью штифтов 16 на внутреннем захвате 8, а другие связаны-с наружным захватом 8 подвижно с возможностью возвратно-поступательного перемещения относительно последнего, например по ходовой посадке или другимиi известными средствами. Левая сторона штока 11 снабжена уплотняющим кольцом 17 и пружиной 18, обеспечивающей при отсутствии давления воздуха отвод наружного захвата 9 от центра зажима заготовки 19. На штангах 15, соединяющих между собой оба захвата 8 и 9, смонтированы пружины 20, предназначенные для возврата в исходное положение внутреннего захваСхват манипулятора содержит корпус,25 та 8 вместе с жестко соединенной с ним
цилиндрической направляющей Ц, функционирующей при этом как дополнительный поршень привода поступательного перемещения. Оба захвата 8 и 9 располовыполненный составным из последовательно соединенных между собой цилиндра 1 с резьбовым фланцем 2, полой Гильзы 3 и цилиндрической направляюцилиндрической направляющей Ц, функц нирующей при этом как дополнительный поршень привода поступательного перемещения. Оба захвата 8 и 9 располо
|{цей k. Цилиндр 1 имеет посадочное мес-30 жены перпендикулярно продольной оси
35
то 5 для соединения с рукой робота |не показана), а резьбовой фланец 2 предназначен для вкручивания в него ильзы 3, причем такое соединение цилиндра 1 с полой гильзой 3 стопорится установочным винтом 6. Полая гильза 3 Имеет по внутренней поверхности ступенчатую расточку и образует одновременно нагнетательную полость 7 привода поступательного перемещения захва- до Тов 8 и 9 (внутреннего и наружного соответственно) с губками 10.
Полая гильза 3 имеет посадочную
упомянутого штока 11, что существенн повышает надежность захвата заготово и удобство манипулирования последним Схват имеет также ограничитель перем щения, выполненный в виде двух регул ровочных винтов 21, один из которых установлен со стороны наружного захв та 9 а другой - со стороны цилиндра 1 с резьбовым фланцем 2, Для предотвращения вращения цилиндрической нап равляющей 4 относительно полой гильз 3 имеются установочный винт 22 и- контргайка 23.
Схват манипулятора работает следу
часть для соединения с цилиндрической
направляющей , непосредственно на ЮШ ИМ образом.
торой закреплен внутренний захват 8, Посадочное место 5 цилиндра 1,яв
5
0
линдрической направляющей k, а непосредственно на свободном конце этой части штока жестко закреплен наружный захват 9- Внутренний 8 и наружный 9 захваты соединены между собой посредством двух параллельных одна другой горизонтальных штанг 15, одни концы которых зафиксированы с помощью штифтов 16 на внутреннем захвате 8, а другие связаны-с наружным захватом 8 подвижно с возможностью возвратно-поступательного перемещения относительно последнего, например по ходовой посадке или другимиi известными средствами. Левая сторона штока 11 снабжена уплотняющим кольцом 17 и пружиной 18, обеспечивающей при отсутствии давления воздуха отвод наружного захвата 9 от центра зажима заготовки 19. На штангах 15, соединяющих между собой оба захвата 8 и 9, смонтированы пружины 20, предназначенные для возврата в исходное положение внутреннего захвата 8 вместе с жестко соединенной с ним
цилиндрической направляющей Ц, функционирующей при этом как дополнительный поршень привода поступательного перемещения. Оба захвата 8 и 9 расположены перпендикулярно продольной оси
упомянутого штока 11, что существенно повышает надежность захвата заготовок и удобство манипулирования последними. Схват имеет также ограничитель перемещения, выполненный в виде двух регулировочных винтов 21, один из которых установлен со стороны наружного захвата 9 а другой - со стороны цилиндра 1 с резьбовым фланцем 2, Для предотвращения вращения цилиндрической направляющей 4 относительно полой гильзы 3 имеются установочный винт 22 и- контргайка 23.
Схват манипулятора работает следу
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1989 |
|
SU1701516A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Захват манипулятора | 1980 |
|
SU984861A2 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1712142A1 |
| Захватное устройство | 1988 |
|
SU1502298A1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
Изобретение относится к машиностроению и предназначено для оснащения роботов и манипуляторов. Целью изобретения является повышение точности и надежности захвата деталей. Охват манипулятора содержит корпус, состоящий из цилиндра 1, полой гильзы 3 и цилиндрической направляющей 4, на которой жестко смонтирован захват 8, а захват 9 жестко смонтирован на двустороннем штоке 11 поршня 12. В левой части штока 11 выполнено отверстие 13 для подачи воздуха в полость 7. Схват имеет также ограничитель перемещения, выполненный в виде двух регулировочных винтов 21. Для предотвращения вращения цилиндрической направляющей 4 относительно полой гильзы 3 имеется установочный винт 22. Захваты 8 и 9 подвижно соединены посредством двух штанг и подпружинены один относительно другого пружинами. В исходном положении поршень 12 находится в крайнем правом положении так же, как и жестко связанный с ним захват 9, а захват 8, жестко связанный с направляющим цилиндром 4, - в крайнем левом положении. В момент захвата в полость 7 подается сжатый воздух, при этом поршень 12 уходит влево, а цилиндрическая направляющая 4 перемещается вправо. Губки захватов 8 и 9 сводятся и с заданной величиной усилия осуществляют надежный зажим детали. 2 ил.
а расположенный параллельно захвату 8 наружный захват 9 жестко закреплен на соответствующем конце штока 11,
ляющегося одновременно составной деталью схвата и его привода поступательного перемещения, вводят в гнездо
выполненного двусторонним. Поршень 12 50 РУКИ робота (не показано). В исходном
привода установлен в средней части двустороннего штока 11, при этом левая сторона последнего имеет сквозное отверстие 13 для подачи воздуха в нагнетательную полость 7 и подвижна относительно осевого отверстия Ui цилиндра 1.
Правая сторона штока 11 установлена по посадке в осевом отверстии ци55
положении, когда сжатый воздух не подан в нагнетательную полость 7 привода поступательного перемещения, пружи на 18 перемещает поршень 12 вправо и через шток 11, а точнее через его пра вую часть, на которой жестко закреплен наружный захват 9, между губками 10 обоих захватов образуется зазор, необходимый для свободного прохода
ляющегося одновременно составной деталью схвата и его привода поступательного перемещения, вводят в гнездо
5
положении, когда сжатый воздух не подан в нагнетательную полость 7 привода поступательного перемещения, пружина 18 перемещает поршень 12 вправо и через шток 11, а точнее через его правую часть, на которой жестко закреплен наружный захват 9, между губками 10 обоих захватов образуется зазор, необходимый для свободного прохода
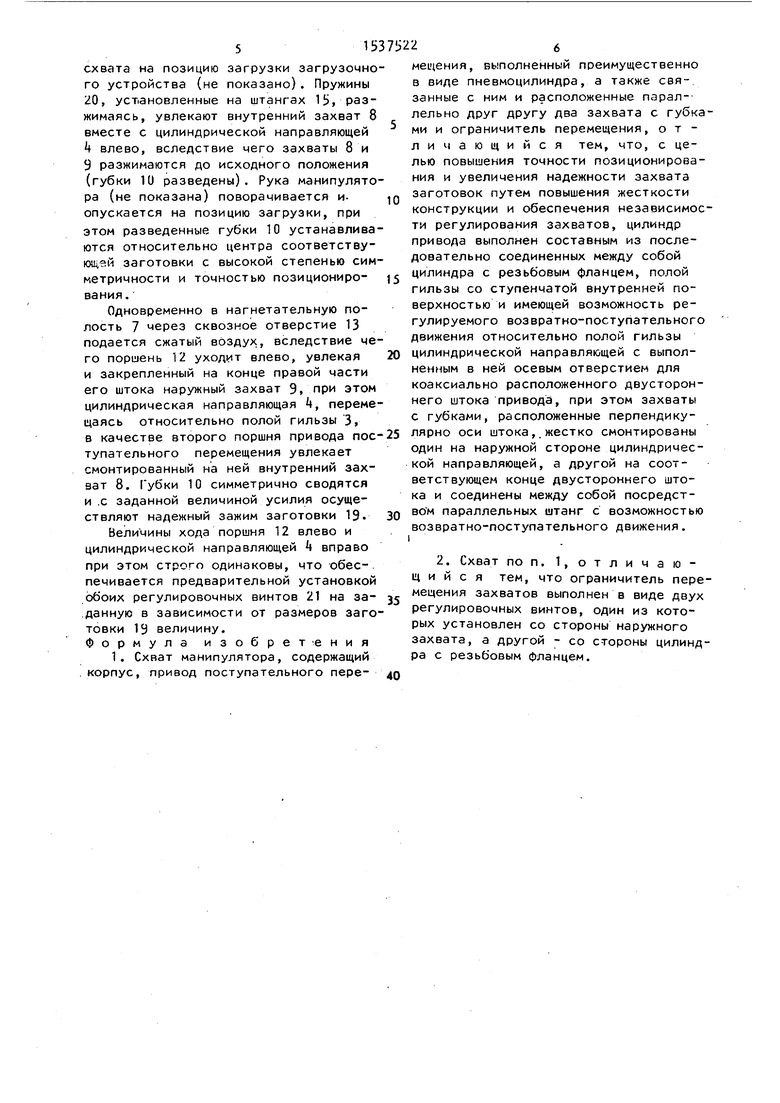
схвата на позицию загрузки загрузочного устройства (не показано). Пружины 20, установленные на штангах 1fj, разжимаясь, увлекают внутренний захват 8 вместе с цилиндрической направляющей k влево, вследствие чего захваты 8 и 9 разжимаются до исходного положения (губки 10 разведены). Рука манипулятора (не показана) поворачивается и- Q опускается на позицию загрузки, при этом разведенные губки 10 устанавливаются относительно центра соответствующей заготовки с высокой степенью симметричности и точностью позиционирования.
Одновременно в нагнетательную полость 7 через сквозное отверстие 13 подается сжатый воздух, вследствие чего поршень 12 уходит влево, увлекая 20 и закрепленный на конце правой части его штока наружный захват 9, при этом цилиндрическая направляющая Ь, перемещаясь относительно полой гильзы 3,
мещения, выполненный преимущественно в виде пневмоцилиндра, а также связанные с ним и расположенные параллельно друг другу два захвата с губка ми и ограничитель перемещения, отличающийся тем, что, с целью повышения точности позиционирования и увеличения надежности захвата заготовок путем повышения жесткости конструкции и обеспечения независимос ти регулирования захватов, цилиндр привода выполнен составным из последовательно соединенных между собой ,, цилиндра с резьбовым фланцем, полой гильзы со ступенчатой внутренней поверхностью и имеющей возможность регулируемого возвратно-поступательного движения относительно полой гильзы цилиндрической направляющей с выполненным в ней осевым отверстием для коаксиально расположенного двустороннего штока привода, при этом захваты с губками, расположенные перпендикув качестве второго поршня привода пос-25 лярно оси штока,.жестко смонтированы
тупательного перемещения увлекает смонтированный на ней внутренний захват 8. Губки 10 симметрично сводятся и .с заданной величиной усилия осуществляют надежный зажим заготовки 19
Величины хода поршня 12 влево и цилиндрической направляющей Ц вправо при этом строго одинаковы, что обеспечивается предварительной установкой
один на наружной стороне цилиндрической направляющей, а другой на соответствующем конце двустороннего штока и соединены между собой посредст- Зо во м параллельных штанг с возможностью
возвратно-поступательного движения. i
данную в зависимости от размеров зато-регулировочных винтов, один из кототовки 19 величину.рых Установлен со стороны наружного
Формула изобретениязахвата, а другой - со стороны цилинд1. Схват манипулятора, содержащийРа с резьбовым фланцем. корпус, привод поступательного пере- до
Q
мещения, выполненный преимущественно в виде пневмоцилиндра, а также связанные с ним и расположенные параллельно друг другу два захвата с губками и ограничитель перемещения, отличающийся тем, что, с целью повышения точности позиционирования и увеличения надежности захвата заготовок путем повышения жесткости конструкции и обеспечения независимости регулирования захватов, цилиндр привода выполнен составным из последовательно соединенных между собой , цилиндра с резьбовым фланцем, полой гильзы со ступенчатой внутренней поверхностью и имеющей возможность регулируемого возвратно-поступательного движения относительно полой гильзы цилиндрической направляющей с выполненным в ней осевым отверстием для коаксиально расположенного двустороннего штока привода, при этом захваты с губками, расположенные перпендикуодин на наружной стороне цилиндрической направляющей, а другой на соответствующем конце двустороннего штока и соединены между собой посредст- во м параллельных штанг с возможностью
возвратно-поступательного движения. i
Фиг.2
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
