1
(21)4749365/08
(22)13.10.89
(4Ь) 30.12.91. Бюл. № 48
(71)Институт проблем механики АН СССР, Центральный институт ядерных исследований АН ГДР и Институт технической кибернетики и робототехники БАН
(72)А.В. Абаринов, В.Б. Вешников, В.Г. Градецкий, Е.А. Семенов (SU), Берндт Хофманн, Арнульф Шварц, Шре- пель Дитер, Пилот Ыанфред (DK), Йордан Беязов и Георгий Николовски (BG)
(53) 621-757.8(088.8)
(56) Авторское свидетельство СССР
№ 1404230, кл. В 23 Р 19/00, 1985.
(54) ПНЕВМАТИЧЕСКИЙ АДАПТИВНЫЙ СБОРОЧНЫЙ СХВАТ
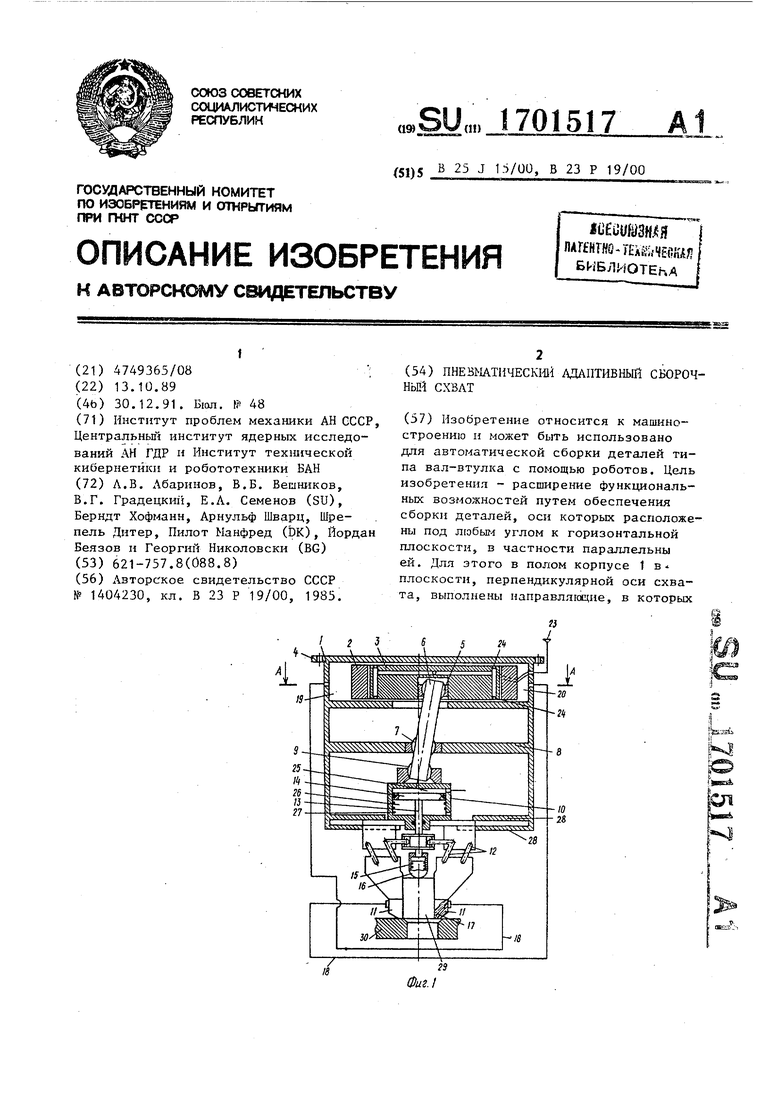
(57) Изобретение относится к машиностроению и может быть использовано для автоматической сборки деталей типа вал-втулка с помощью роботов. Цель изобретения - расширение функциональных возможностей путем обеспечения сборки деталей, оси которых расположены под любым углом к горизонтальной плоскости, в частности параллельны ей. Для этого в полом корпусе 1 в плоскости, перпендикулярной оси схва- та, выполнены направляющие, в которых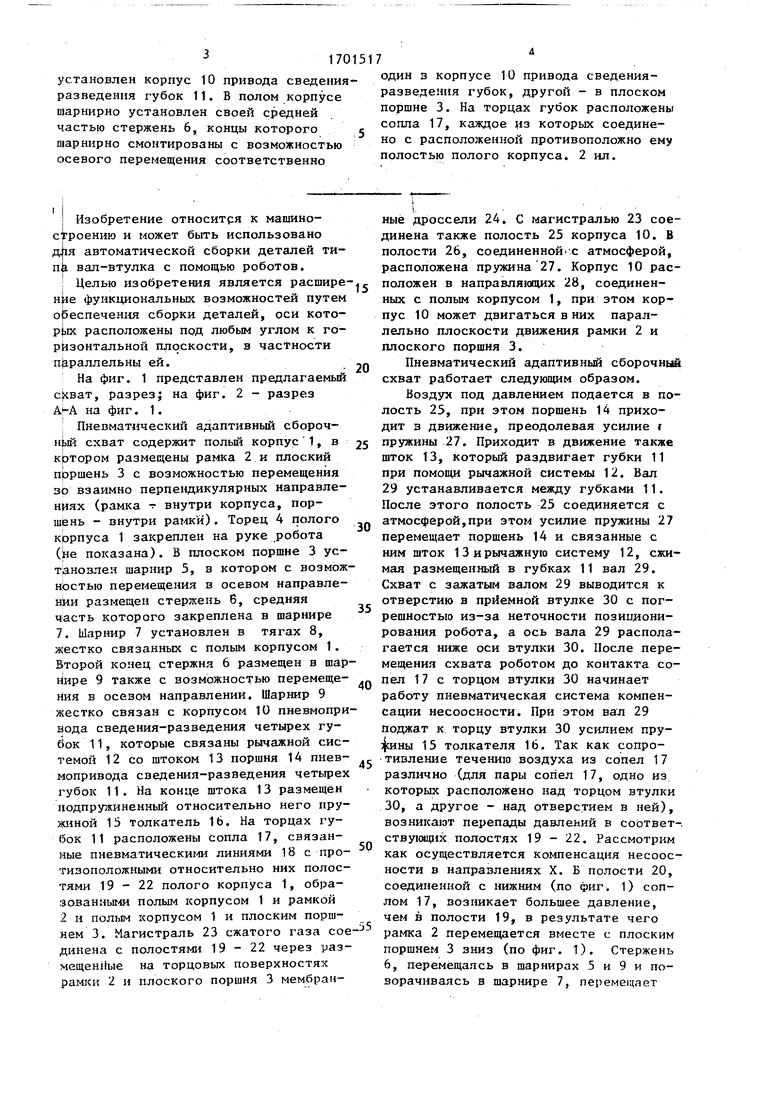
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический адаптивный сборочный схват | 1989 |
|
SU1794642A1 |
| Пневматический сборочный схват | 1985 |
|
SU1404230A1 |
| Адаптивный схват | 1986 |
|
SU1395480A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1992 |
|
RU2008200C1 |
| Схват очувствленного робота | 1984 |
|
SU1227464A1 |
| Схват робота-манипулятора | 1981 |
|
SU1007969A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Схват промышленного робота | 1978 |
|
SU673448A1 |
| Схват манипулятора для цилиндрических деталей | 1986 |
|
SU1323373A1 |
01
Фиг I
установлен корпус 10 привода сведения- разведения губок 11. В полом корпусе Шарнирно установлен своей средней частью стержень 6, концы которого « Шарнирно смонтированы с возможностью осевого перемещения соответственно
Изобретение относитря к машиностроению и может быть использовано для автоматической сборки деталей ти- n,i вал-втулка с помощью роботов.
Целью изобретения является расширение функциональных возможностей путем обеспечения сборки деталей, оси кото- pjjix расположены под любым углом к горизонтальной плоскости, в частности параллельны ей.
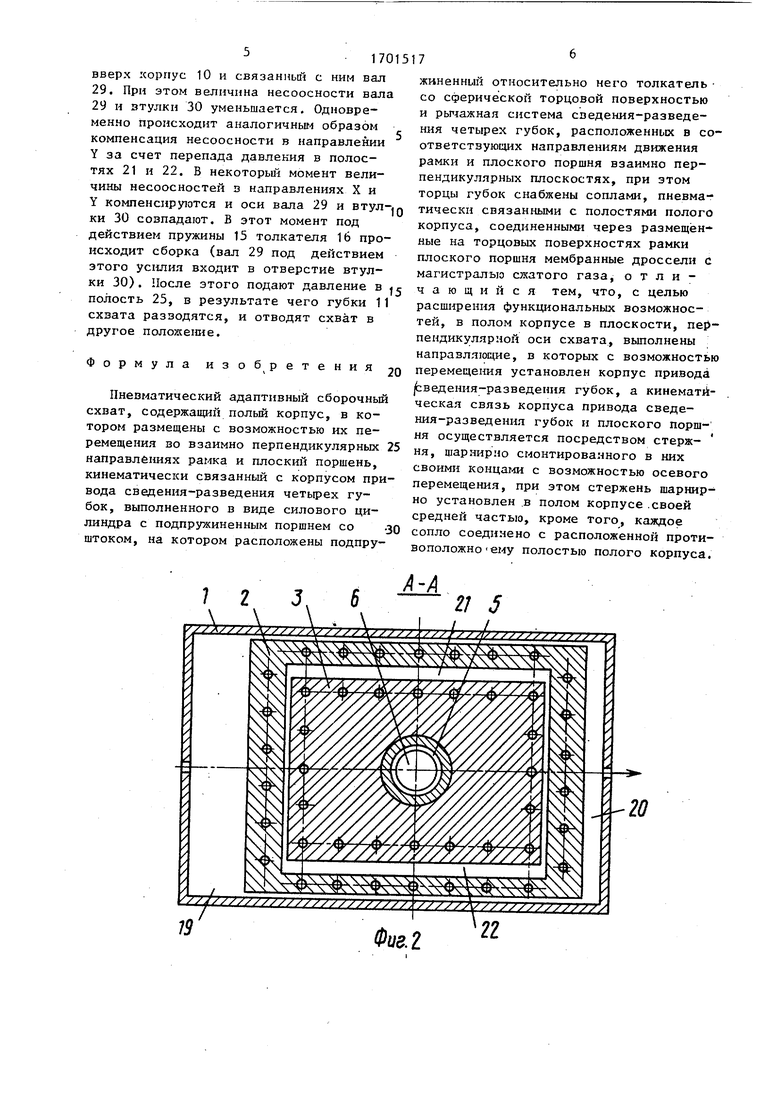
На фиг. 1 представлен предлагаемый сКват, разрез; на фиг. 2 - разрез Аь-А на фиг. 1.
Пневматический адаптивный сбороч- схват содержит полый корпус 1, в котором размещены рамка 2 и плоский прршень 3 с возможностью перемещения зо взаимно перпендикулярных направлениях (рамка - внутри корпуса, поршень - внутри рамки). Торец 4 полого корпуса 1 закреплен на руке робота (не показана). В плоском поршне 3 установлен шарнир 5, в котором с возможностью перемещения в осевом направлении размещен стержень 6, средняя часть которого закреплена в шарнире 7. Шарнир 7 установлен в тягах 8, Жестко связанных с полым корпусом 1. Второй конец стержня 6 размещен в шарнире 9 также с возможностью перемещения в осевом направлении. Шарнир 9 жестко связан с корпусом 10 пневмопривода сведения-разведения четырех губок 11, которые связаны рычажной системой 12 со штоком 13 поршня 14 пневмопривода сведения-разведения четырех губок 11. На конце штока 13 размещен подпружиненный относительно него пружиной 15 толкатель 16. На торцах губок 11 расположены сопла 17, связанные пневматическими линиями 18 с противоположными относительно них полостями 19-22 полого корпуса 1, образованными полым корпусом 1 и рамкой 2 и полым корпусом 1 и плоским поршнем 3. Магистраль 23 сжатого газа соединена с полостями 19-22 через раз- мещенйые на торцовых поверхностях рамки 2 и плоского поршня 3 мембранодин з корпусе 10 привода сведения- разведения губок, другой - в плоском поршне 3. На торцах губок расположены сопла 17, каждое из которых соединено с расположенной противоположно ему полостью полого корпуса. 2 ил.
5
0
5
0
5
0
5
0
ные дроссели 24. С магистралью 23 соединена также полость 25 корпуса 10. В полости 26, соединенной с атмосферой, расположена пружина 27. Корпус 10 расположен в направляющих 28, соединенных с полым корпусом 1, при этом корпус 10 может двигаться в них параллельно плоскости движения рамки 2 и плоского поршня 3.
Пневматический адаптивный сборочный схват работает следующим образом.
Воздух под давлением подается в полость 25, при этом поршень 14 приходит з движение, преодолевая усилие г пружины 27. Приходит в движение также шток 13, который раздвигает губки 11 при помощи рычажной системы 12. Вал 29 устанавливается между губками 11. После этого полость 25 соединяется с атмосферой,при этом усилие пружины 27 перемещает поршень 14 и связанные с ним шток 13ирычажную систему 12, сжимая размещенный в губках 11 вал 29. Схват с зажатым валом 29 выводится к отверстию в приемной втулке 30 с погрешностью из-за неточности позиционирования робота, а ось вала 29 располагается ниже оси втулки 30. После перемещения схвата роботом до контакта сопел 17 с торцом втулки 30 начинает работу пневматическая система компенсации несоосности. При этом вал 29 поджат к торцу втулки 30 усилием пру- э|сины 15 толкателя 16. Так как сопротивление течению воздуха из сопел 17 различно (для пары сопел 17, одно из которых расположено над торцом втулки 30, а другое - над отверстием в ней), возникают перепады давлений в соответ-. ствующих полостях 19 - 22. Рассмотрим как осуществляется компенсация несоосности в направлениях X. Б полости 20, соединенной с нижним (по фиг. 1) соплом 17, возникает большее давление, чем в полости 19, в результате чего рамка 2 перемещается вместе с плоским поршнем 3 вниз (по фиг. 1). Стержень 6, перемещаясь в шарнирах 5 и 9 и поворачиваясь в шарнире 7, перемещает
Фиг. 2
