(Л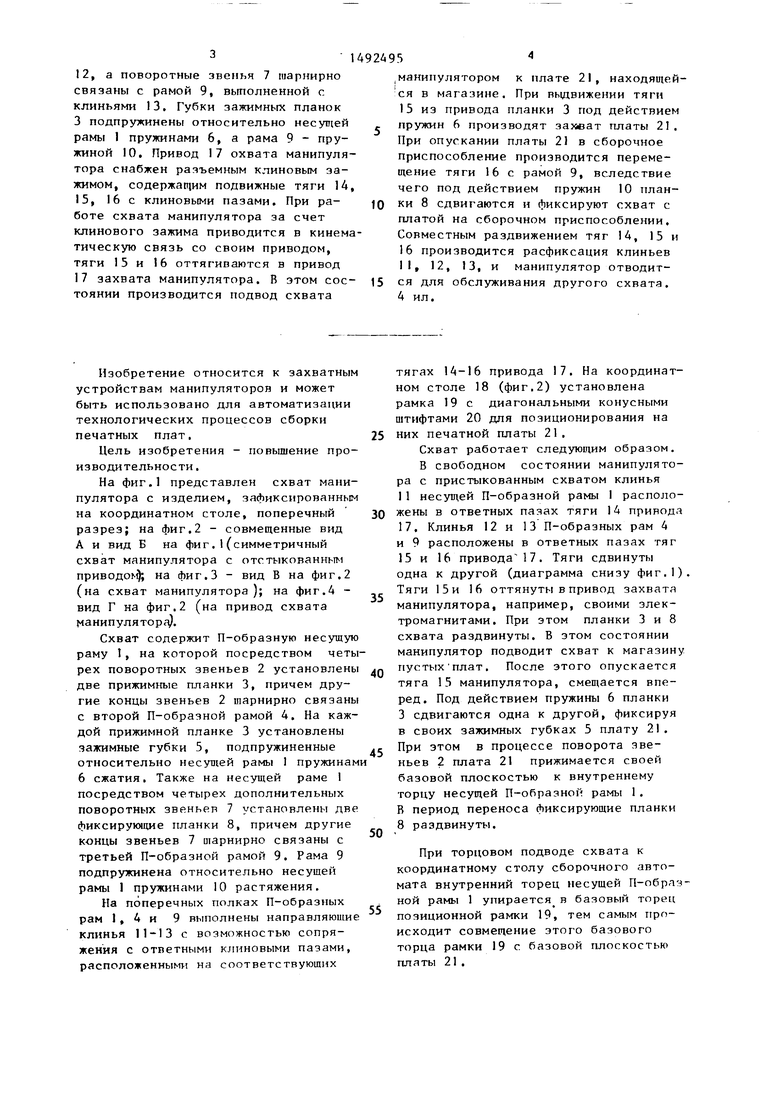
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Схват робота | 1985 |
|
SU1294604A1 |
| Поточная линия для изготовления модельного блока в точном литье | 1983 |
|
SU1473900A1 |
| Сборочный автомат | 1982 |
|
SU1106626A1 |
| Схват манипулятора | 1988 |
|
SU1585146A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Металлорежущий станок с устройством для автоматической смены многошпиндельных коробок | 1988 |
|
SU1521552A2 |
| МНОГОЦЕЛЕВОЙ СТАНОК | 1993 |
|
RU2108219C1 |
| СТЕНД ДЛЯ СБОРКИ И СВАРКИ РАМЫ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2017 |
|
RU2680114C1 |
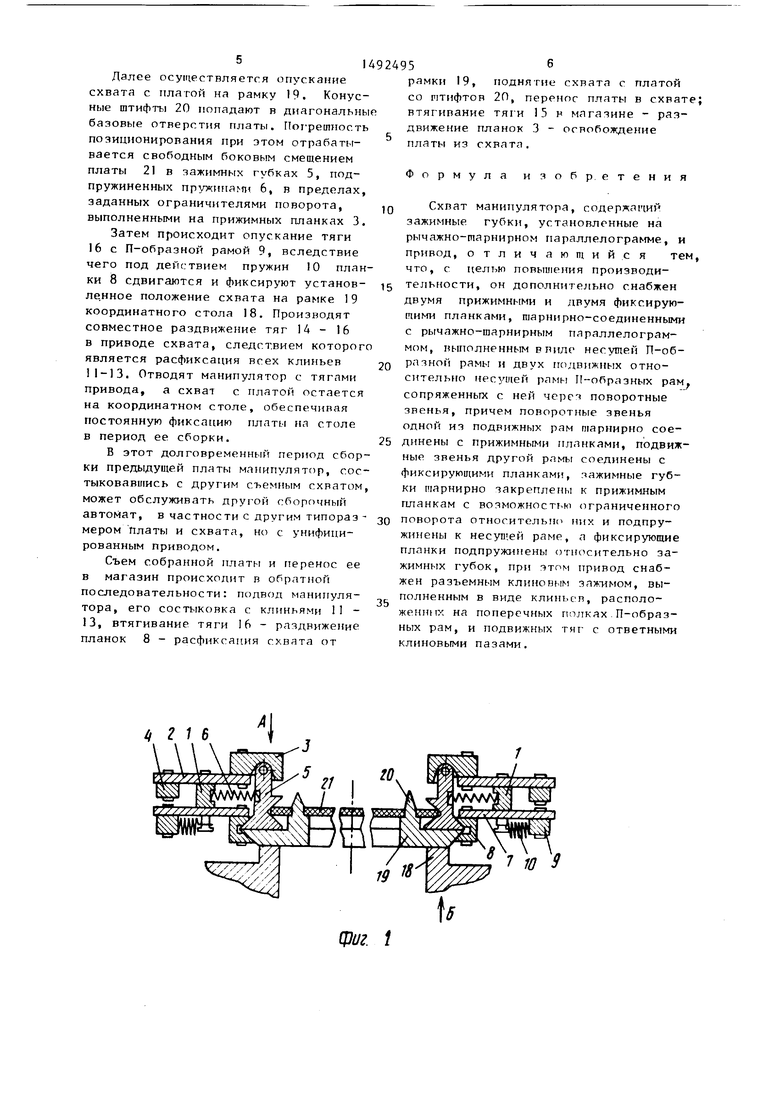
Изобретение относится к захватным устройствам манипуляторов и может быть использовано для автоматизации технологических процессов сборки печатных плат. Цель изобретения - повышение производительности. Схват манипулятора содержит несущую раму 1, выполненную с клиньями 11, на которой посредством поворотных звеньев 2 и 7 установлены прижимные планки 3 и фиксирующие планки 8. Поворотные звенья 2 шарнирно связаны с рамой 4, выполненной с клиньями 12, а поворотные звенья 7 шарнирно связаны с рамой 9, выполненной с клиньями 13. Губки зажимных планок 3 подпружинены относительно несущей рамы 1 пружинами 6, а рама 9 - пружиной 10. Привод 17 охвата манипулятора снабжен разъемным клиновым зажимом, содержащим подвижные тяги 14,15,16 с клиновыми пазами. При работе схват манипулятора за счет клинового зажима приводится в кинематическую связь со своим приводом, тяги 15 и 16 оттягиваются в привод 17 захвата манипулятора. В этом состоянии производится подвод схвата манипулятором к плате 21, находящейся в магазине. При выдвижении тяги 15 из привода планки 3 под действием пружин 6 производят захват платы 21. При опускании платы 21 в сборочное приспособление производится перемещение тяги 16 с рамой 9, вследствие чего под действием пружин 10 планки 8 сдвигаются и фиксируют схват с платой на сборочном приспособлении. Совместным раздвижением тяг 14,15 и 16 производится расфиксация клиньев 11,12,13, и манипулятор отводится для обслуживания другого схвата. 4 ил.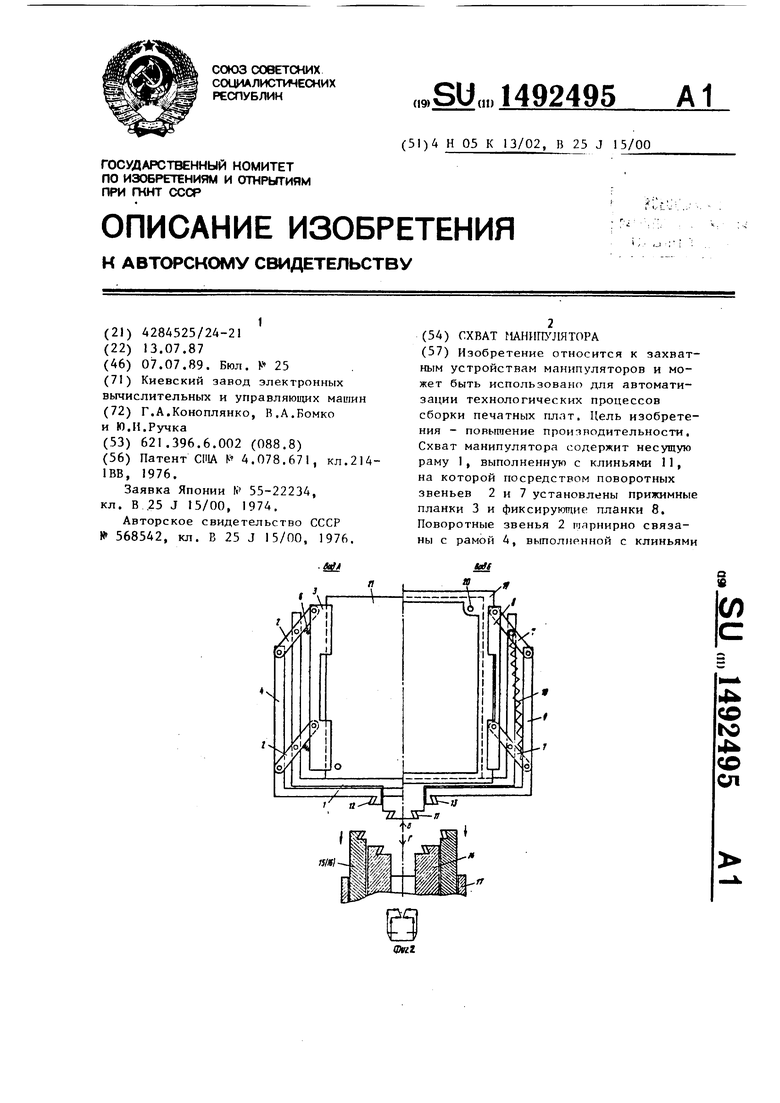
4 ю
4
сл
О
Фкг
3 1
12, а поворотные звенья 7 шарнирно связаны с рамой 9, выполненной с клинья1чи 13, Губки зажимных планок 3 подпружинены относительно несуг1ей рамы 1 пружинами 6, а рама 9 - пружиной 10. Привод 17 охвата манипулятора снабжен разъемным клиновым зажимом, содержащим подвижные тяги 14, 15, 16с клиновьЕМи пазами. При работе охвата манипулятора за счет клинового зажима приводится в кинема тическую связь со своим приводом, тяги 15 и 16 оттягиваются в привод 17 захвата манипулятора, В этом состоянии производится подвод схвата
Изобретение относится к захватным устройствам манипуляторов и может быть использовано для автоматизации технологических процессов сборки печатных плат.
Цель изобретения - повышение производительности ,
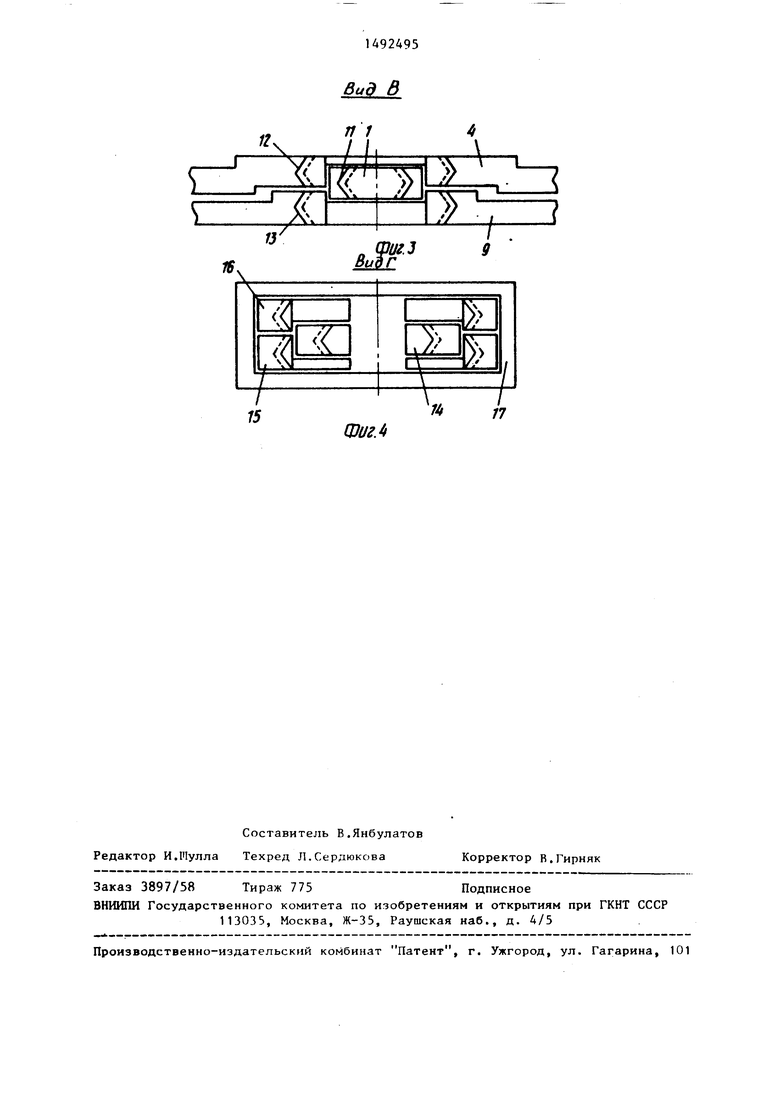
На фиг,1 представлен схват манипулятора с изделием, зафиксированным на координатном столе, поперечный разрез; на фиг,2 - совмещенные вид А и вид Б на фиг,1(симметричный схват манипулятора с отстыкованным пpивoдo на фиг,3 - вид В на фиг,2 (на схват манипулятора); на фиг,4 - вид Г на фиг,2 (на привод схвата манипулятора),
Схват содержит П-образную несущую раму 1, на которой посредством четырех поворотных звеньев 2 установлены две прижимные планки 3, причем другие концы звеньев 2 шарнирно связаны с второй П-образной рамой 4, На каждой прижимной планке 3 установлены зажимные губки 5, подпружиненные относительно несущей рамы 1 пружинам 6 сжатия. Также на несущей раме 1 посредством четырех дополнительных поворотных звеньев 7 установлены две фиксирующие планки 8, причем другие концы звеньев 7 шарнирно связаны с третьей П-образной рамой 9, Рама 9 подпружинена относительно несушей рамы 1 пружинами 10 растяжения,
На поперечных полках П-образных рам 1, 4 и 9 выполнены направляющие клинья 11-13 с возможностью сопряжения с ответными к;п1новыми пазами, расположенными на соответствующих
92А95 манипулятором к плате 21, находящей- ся в магазине. При выдвижении тяги
15из привода планки 3 под действием f пружин 6 производят платы 21.
При опускании платы 21 в сборочное приспособление производится перемещение тяги 16 с рамой 9, вследствие чего под действием пружин 10 план- 10 ки 8 сдвигаются и фиксируют схват с платой на сборочном приспособлении. Совместным раздвижением тяг 14, 15 и
16производится расфиксация клиньев И, 12, 13, и манипулятор отводит15 ся для обслуживания другого схвата, 4 ил.
5
0
5
0
5
0
5
тягах 14-16 привода 17, На координатном столе 18 (фиг.2) установлена рамка 19 с диагональными конусными штифтами 20 для позиционирования на них печатной платы 21,
Схват работает следующим образом.
В свободном состоянии манипулятора с пристыкованным схватом клинья 11 несущей П-образной рамы 1 расположены в ответных пазах тяги 14 привода 17, Клинья 12 и 13 П-образных рам 4 и 9 расположены в ответных пазах тяг 15 и 16 привода 17. Тяги сдвинуты одна к другой (диаграмма снизу фиг.1). Тяги 15и 16 оттянуты в привод захвата манипулятора, например, своими злек- тромагнитами. При этом планки 3 и 8 схвата раздвинуты, В этом состоянии манипулятор подводит схват к магазину пустых плат. После этого опускается тяга 15 манипулятора, смещается вперед. Под действием пружины 6 планки 3 сдвигаются одна к другой, фиксируя в своих зажимных губках 5 плату 21, При этом в процессе поворота звеньев 2 плата 21 прижимается своей базовой плоскостью к внутреннему торцу несущей П-образной рамы 1, В период переноса фиксирующие планки 8 раздвинуты.
При торцовом подводе схвата к координатному столу сборочного автомата внутренний торец несущей П-образной рамы 1 упирается в базовый торец позиционной рамки 19, тем самым происходит совмещение этого базового торца рамки 19 с базовой плоскостью платы 21,
51А92495
Далее осуществляется опускание рамки 19, поднятие схвата с платой схвата с платой на рамку 19. Конус- со штифтов 2П, перенос платы в схвате;
втягирание тяг и 15 н магазине - раз- движение планок 3 - освобождение
ные штифты 20 попадают в диагональные базовые отверстия платы. Пог-решность позиционирования при этом отрабатьг- вается свободным боковым смещением платы 21 в зажимных губках 5, подпружиненных npyxunahni 6, в пределах, заданных ограничителями поворота, д выполненными на прижимных планках 3.
Затем происходит опускание тяги 16 с ГТ-образной рамой 9, вследствие чего под действием пружин 10 планки 8 сдвигаются и фиксируют установ- 15 тельности, он дополнительно снабжен ле.нное положение схвата на рамке 19 двумя прижимными и двумя фиксируюплаты из схвата.
Формула изобретения
Схват маниттулятора, содержаний зажимные губки, установленные на рычажно-тарнирном параллелограмме, и Привод, отличающийся тем, что, с целью повышения производикоординатного стола 18. Производят совместное раздвижение тяг 14 - 16 в приводе схвата, следствием которого является расфиксация всех клиньев 11-13. Отводят манипулятор с тягами привода, а схват с платой остается на координатном столе, обеспечивая постоянную фиксацию платы tia столе в период ее сборки.
В этот долговременный период сборки предыдущей платы манипулятор, состыковавшись с другим съемным схватом.
может обслуживать другой сборочный планкам с возможност1,ю 1граниченного автомат, в частности с другим типораз - ЗО поворота относительпс них и подпру- мером Платы и схвата, но с унифици- жинены к несуп ей раме, а фиксирующие
планки подпружинены (относительно зажимных губок, при этом привод снаброванным приводом.
Съем собранной платы и перенос ее в магазин происходит в обратной последовательности: подвод манипулятора, его состыковка с клиньями 11 - 13, втягивание тяги 16 - раздвижение планок 8 - расфиксация схвата от
35
жен разъемнЕ.1М клиновым , выполненным в виде клиньс П, расположенных на поперечных полках.П-образных рам, и подвижных тяг с ответными клиновыми пазами.
216
тельности, он дополнительно снабжен двумя прижимными и двумя фиксируюплаты из схвата.
Формула изобретения
Схват маниттулятора, содержаний зажимные губки, установленные на рычажно-тарнирном параллелограмме, и Привод, отличающийся тем, что, с целью повышения производи
лими планками, шарнирно-соединенными с рычажно-шарнирным параллелограммом, выполненным в пиле несущей П-об- разной рамы и двух подвижных относительно несуи1ей рамп П-образных рам, сопряженных с ней через поворотные звенья, причем поворотные звенья одной из подвижных рам гпарнирно сое- динены с прижимными планками, подвижные звенья другой рамы соединены с фиксирующими планками, зажимные губки тарнирно закреплены к прижимным
жен разъемнЕ.1М клиновым , выполненным в виде клиньс П, расположенных на поперечных полках.П-образных рам, и подвижных тяг с ответными клиновыми пазами.
7 10 9
фиг. i
75
ШигЛ
/
17
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Захват | 1976 |
|
SU568542A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
