(54) ПНЕВМАТИЧЕСКИЙ ПРИВОД ГРУЗОПОДЬЕМНОГО
УСТРОЙСТВА

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическая система грузоподъемного устройства | 1986 |
|
SU1762759A3 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| ТАЛЬ ПНЕВМАТИЧЕСКАЯ | 2004 |
|
RU2265572C1 |
| Кран-манипулятор | 1984 |
|
SU1278293A1 |
| ЭЛЕКТРОПНЕВМОПРИВОД ОТКРЫВАНИЯ ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2261977C1 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Дозатор | 1991 |
|
SU1818539A1 |
| Пневматический зарядчик для непатронированных взрывчатых веществ | 1989 |
|
SU1739177A1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ КЛАПАННЫЙ ПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2269039C1 |
| Привод вертикального перемещения стола пакетирующего устройства | 1985 |
|
SU1375539A1 |
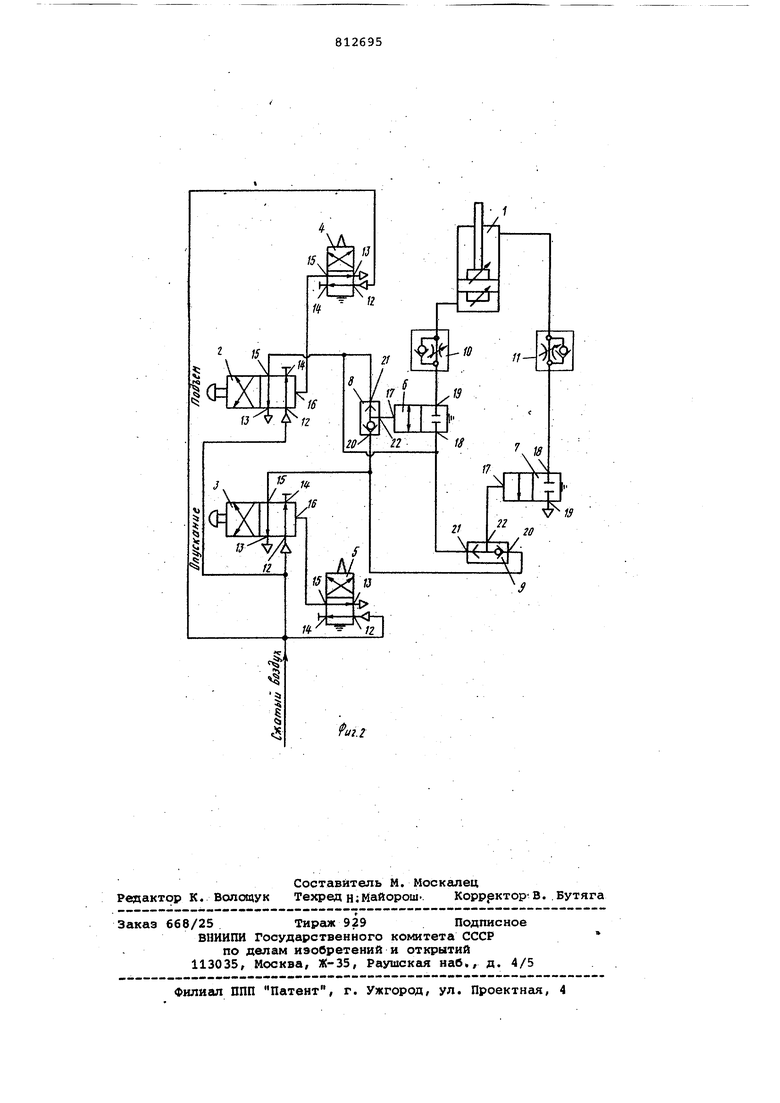
. . . 1 . Изобретение относится к подъемнотранспортному машиностроению, а имен но к пневматическим приводам грузоподъемных устройств. Известен пневматический привод грузоподъемного устройства, содержащий пневмоцилиндр подъема груза и пневмопереключатель, включающий пнев мораспределители с ручным управлением и пневматическим управлением, сое динв1Шыё между собой трубопроводами 1 . Недостатком данного пневмопривода является то, что во время подъема ил опускания груза оператор вынуходен держать включенным один из пневмораспраделителей с ручным управлением в результате чего одна рука оператора непрерывно занята, а это затрудняет и осложняет его работу. Цель изобретения - автоматизация работы привода., Для этого пневмопереключатель содержит пнёвмораспределители с путе-. вым управлением и разделительные кла паны, а пнёвмораспределители с ручным управлением содержат камеры управления для пневматического возврата их распределительных элементовв исходное положение, при этом выходныв каналы пневмораспределителей с путевым управлением соединены с камерами управления пневмораспределителей с ручным управлением, выходной канал одного пневмораспределителя с ручным управлением соединен первыми входными каналами разделительных клапанов и одним из пневмораспределителей с пневматическим управлением, выходнойР канал другого пневмораспределителя с ручным управлением соединен со вторыми входными каналами разделительных клапанов, выходные каналы разделительных клапанов соединены с камерами управления пневмораспраделителей с пневматическим управлением, выходной канал одного пневмораспределителя с пневматическим управлением сообщен с надштоковой полостью пневмоцилиндра подъема груза, входной канал другого пневмораспределителя с пневма- тическим управлением сообщен с под- -. штоковой полостью пневмоцилиндра подъема груза, а выходной канал другого пневмораспределитепя с пневматическим управлением сообщен с атмрсфевой. На фиг. 1 изображен кран, общий вид; на фиг. 2 - пневматическая схе:ма грузоподъемного устройства.
Устройство содержит пневмоцилиндр 1 подъема груза, пневмораспределители 2 и 3 с ручным управлением, пневмораспределители 4 и 5 с. путевым управлением, пневмораспределители б и 7 с пневматическим управлением, разделительные клапаны 8 и 9, дроссели с .обратным клапаном 10 и 11. Казхдый пневмораспределитель с ручным и путевым управлением содержит два входных канала 12 и 13 и два выходных канала 14 и 15. пневмораспределитель с ручным управлением содержит камеру управления .17, входной канал 18 и выходной канал 19, Каждый разделительный клапан содержит два входных канала 20 и 21 и выходной канал 22. Пневмораспределители 4 и 5 управляются кулачками 23 и 24, положение которых может меняться в зависимости от требуемой высоты подъема или опускания груза. Входные каналы 12 пневмораспределителей 2, 3, 4 и 5 соединены с источником питания, входные каналы 13 пневмораспределителей 2, 3 4 и 5 - с атмосферой. Выходные каналы 14 пневмораспределителей 2, 3, 4 и 5 заглушены. Выходной канал 15 пневмораспределителя 2 соединен.с входным каналом 18 пневмораспределителя 6 и входными каналами 21 разделительных клапанов 8 и 9. Выходной канал 15 пневмораспределителя 3 соединен с выходными каналами 20 разделительных клапанов 8 и 9. Выходной канал 15 пневмораспределителя 4 соединен с камерой управления 16 пневмораспределителя 2. Выходной канал 15 пневмораспределителя 5 соединен с камерой управления 16 пневмораспределителя 3. Выходной канал 19 пневмораспределителя 6 соединен через дроссель с обратным клапаном 10 с нижней (безштоковой) камерой пневмоцилиндра 1. Входной канал 18 пневмораспределителя 7 соединен через дроссель с обратным клапаном 11. с верхней (штоковой) камерой пневмоцилиндра 1. Выходной канал 19 пне.вмораспределителя 7 соединен с атмосферой. Выходной канал 22 разделительного клапана 8 соединен с камерой управления 17 пневиораспределителя 6. Выходной канал 22 разделительного клапана 9 соединен с камерой управления 17 пневмораспределителя ;7.
-Устройство работает следующим образом.
При необходимости поднять груз оператор переключает пневмораспределитель 2, вследствие чего выходной канал 15 пневмораспределителя 2 соединяется с его входным каналом 12 и сжатый воздух от источника питания поступает через разделительный клапан 8 в камеру управления 17 пневмораспределителя 7. Пневмораспределители 6 и 7 переключаются, вследствие чего сжатый воздух от источника питания через пневмораспределители 2 и 6 и дроссель с обратным клапаном 10 поступает в нижнюю камеру пневмоцилиндра 1, а верхняя камера пневмоцилиндра 1 через дроссель с обратным клапаном 11 и пневмс5распределитель 7 соединяется с атмосферой. Шток пневмоцилиндра 1 выдвигается, поднимая груз. Подъем груза продолжается до переключения пневмораспререлителя 4, в результате чего выходной канал 15 пневмораспределителя 4 соединяется с его входным каналом 12 и сжатый воздух поступает в камеру управления 16 пневмораспределителя 2 переключая его в исходное положение. При этом камера управления 17 пневмораспределителя 6 через разделительный клапан 8 и камеру управления 17 пневмораспределителя 7 чер.ез разделительный клапан 9 соединяется с атмосферой. Пневмораспределители 6 и 7 переключаются, вследствие чего нижняя камера пневмоцилиндра 1 через дроссель с обратным клапаном 10, пневмораспределители 6 и 2 соединяется с атмосферой, а верхняя камера пневмоцилиндра 1 соединяется с атмосферой через дроссель с обратным клапаном 11 и пневмораспределитель 7. Шток пневмоцилиндра 1 под действием своего веса и веса груза втягивается (опускается). Опускание груза продолжается до переключения пневмораспределителя с путевым управлением 5, в результате чего выходной- канал 15 пневмораспределителя .5 соединяется с его входным каналом 12 и сжатый воздух поступает в камеру управления 16 пневмораспределителя 3, переключая его в исходное положение. При этом камеры управления 17 пневмораспределителей 6 и 7 соединяются с атмосферой. Пневмораспределители 6 и 7 переключаются, запирая камеры пневмоцилиндра 1. Перемещение штока пневмоцилиндра прекращается.
Формула изобретения
Пневматический привод грузоподъемного устройства, содержащий пневмоцилиндр подъема груза и пневмопереключатель, включающий пневмораспределители с ручным управлением и пневматическим управлением, соединенные между собой трубопроводами, о т л и чающийся тем, что, с целью автоматизации его работы, пневмопереключатель содержит пневмораспределители с путевым управлением и разделительные клапанеа, а пневмораспределители с ручным управлением содержат камеры управления для пневматического возврата их распределительных элементов в исходное положение, при этом выходные каналы пневмораспределителей с путевым управлением соединены с камерами управления пневмораспреде(лителей с ручным управлением, выход1ной канал одного пневмораспределителя с ручным управлением соединен первыми входными каналами разделительных клапанов и одним из пневмораспределителей с пневматическим управлением, выходной канал другого пневмораспределителя с ручным управлением соединен со вторыми входными каналами разделительных клапанов, выходные каналы разделительных клапанов соединены с камерами управления пневмораспреде.пителей с пневматическим управлением, выходной канал одного пневмораспрецелителя с пневматическим управлением сообщен с надштоковой полостью ттневмоцилиндра подъема груза, входной канал другого пневмораспределителя с пневматическим управлением сообщен с подштоковой полостью пнёвмоцилиндра подъема груза, а выходной канал другого пневмораспределителя с пневматическим управлением сообщен с атмосферой.
Источники информации, принятые во внимание при экспертизе
0
«J
Г иг.г
