(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОИЗВОДИТЕЛЬНОСТИ одноковшового ЭКСКАВАТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для взвешивания ковшадРАглАйНА | 1979 |
|
SU804775A1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ЗВУКА ПОВЫШЕННОЙ ТОЧНОСТИ | 1998 |
|
RU2152596C1 |
| Измеритель характеристик электрического сигнала | 1987 |
|
SU1429053A1 |
| Устройство автоматического измерения параметров электродинамических сейсмоприемников | 1986 |
|
SU1327035A1 |
| Способ контроля и учета работы экскаватора-мехлопаты | 1987 |
|
SU1425277A1 |
| Устройство для измерения и контроля углов поворота платформы экскаваторадраглайна | 1978 |
|
SU747943A1 |
| Устройство для широтно-импульсного управления вентильным преобразователем | 1988 |
|
SU1610555A1 |
| Устройство для контроля работы экскаватора-драглайна | 1976 |
|
SU643597A1 |
| Система для контроля и управления автомобильно-экскаваторными комплексами | 1977 |
|
SU734725A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
1
Изобретение предназначено для автоматического весового контроля производительности одноковшового экскаватора и других горно-транспортных ковшовых механизмов и может быть использовано в горнометаллургической, строительной и других отраслях промышленности, в частности, на горных предприятиях цветной и черной мета,ллургии.
Известно устройство контроля производительности экскаватора, включающее блок выделения статической составляюш,ей тока, датчики тока и напряжения, интеграторы и сумматоры 1..
Однако оно имеет низкую точность из-за фиксирования весовых импульсов в период перемещения груженого (порожнего) ковша, использования в качестве датчика веса неточного измерителя статической составляющей тока и мощности двигателя и является сложным конструктивно в связи с тем, что в него введен ряд сложных узлов.
Известно устройство для контроля производительности одноковшового экскаватора, включающее датчик веса, подключенный к электровесопреобразователю, блок контроля операции разгрузки ковша, суммирующий блок и блок управления 2.
Недостатками этого устройства являются низкая точность из-за нелинейных искажений, вносимых координатными измерителями положения ковша в пространстве и компенсатором добавочного веса, и наличие режима непрерывного контроля фиксируемых параметров, что резко сокращает их применение.
Цель изобретения - повышение точности контроля за счет импульсного измерения веса груза в период разгрузки ковша.
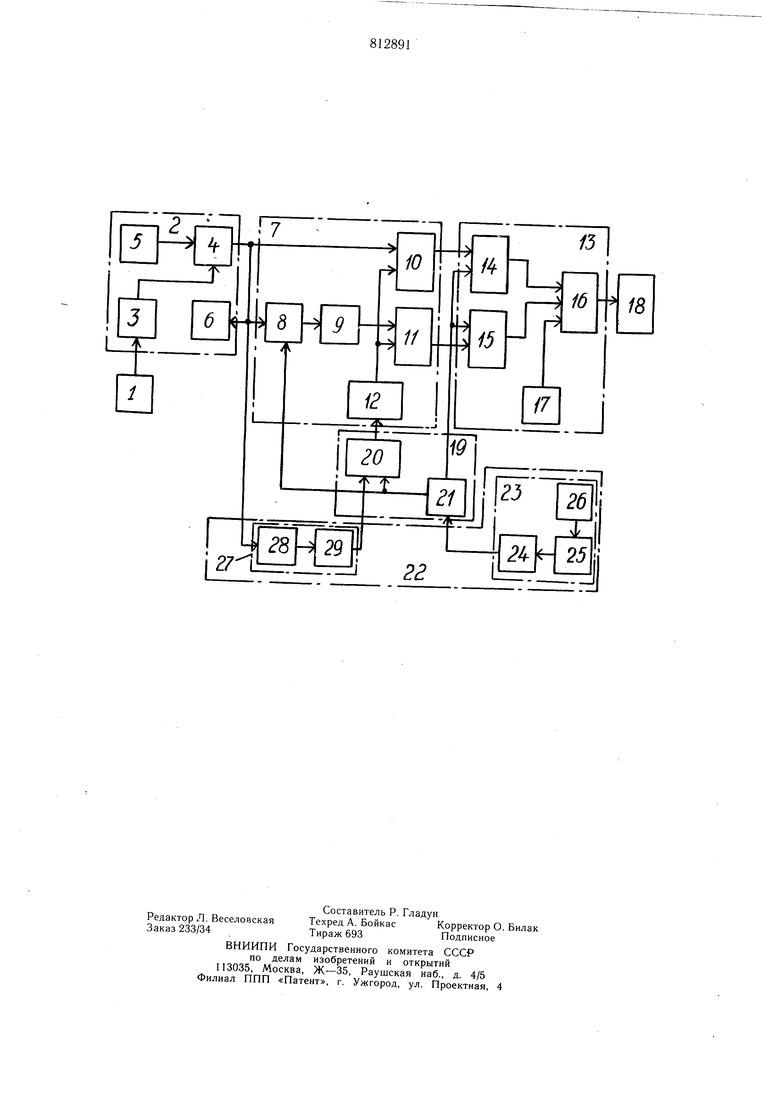
Поставленная цель достигается тем, что устройство снабжено последовательно соединенными блоком формирования разностного сигнала и блоком частотного заполнения разностного сигнала, входы которых соединены с выходами блока управления, ко входам которого подключены два выхода блока контроля операции разгрузки ковща, третий выход которого соединен со входами блока формирования разностного сигнала и с выходами электровесопреобразователя, а выход блока частотного заполнения разностного сигнала подключен ко входу суммирующего блока. Кроме того, электровесопреобразователь выполнен в виде прибора предварительного измерения, компенсатора добавочного веса и подключенных к его входам интегратора весовых импульсов и координатного измерителя текущего расположения ковша. Блок управления выполнен в виде после довательно соединенных одновибратора и логического элемента И. Блок контроля операции разгрузки ковша выполнен в виде узлов контроля начала и конца разгрузки, первый из которых содержит последовательно соединенные между собой механизм открывания ковша, конечный выключатель и переключатель рода работ, а второй содержит последовательно соединенные инвертор выходного сигнала электровесопреобразователя и линию временной задержки. Блок формирования разностного сигнала выполнен в виде последовательно соединенных ключа и запоминающего элемента, двух компараторов и генератора линейноизменяющегося напряжения, выход которого соединен со входами компараторов и выходом запоминающего элемента, соединенного с одним из компараторов. J-4 Блок частотного заполнения разностного сигнала выполнен в виде логического элемента И и подключенных к его входу двух триггеров и генератора тактовых импульсов. На чертеже представлена структурная схема устройства. Устройство состоит из датчика I веса, например, тросового электродинамометра, электровесопреобразователя 2, включающего интегратор 3 весовых импульсов, компенсатор 4 добавочного веса, координатный измеритель 5 текущего расположения коБща в пространстве и прибор предварительного измерения - стрелочный индикатор 6, блока 7 формирования разностного сигнала, состоящего из отсекающего ключа 8 (в простейщем случае - усилителя повторителя или же реле с контактами и т. п.), запоминающего элемента 9 (например, конденсатора), компараторов 10, 11 формирования импульсов при порожнем и груженом ковще (дифференциальных усилителей), генератора 12 линейно-изменяющегося напряжения, блока 13 частотного заполнения разностного сигнала в составе логического устройства со встроенными управляющими триггерами 14, 15, логического элемента И 16 и генератора 17 тактовых импульсов, цифрового суммирующего блока 18. В устройство входит блок 19 управления процессом контроля, включающий логический элемент И 20 и одновибратор 21 управления измерением, который приводится в действие блоком 22 контроля разгрузки ковша с помощью узлов контроля начала 23 и конца 27 разгрузки ковща. Узел 23 контроля начала операции разгрузки ковща содержит переключатель 24 рода работы,концевой выключатель 25 механизма 26 открывания ковша. Узел контроля конца операции разгрузки ковша 27 состоит из инвертора выходного сигнала электровесопреобразователя 28 и линии временной задержки 29. Устройство работает следуюш,им образом. Во время работы экскаватора с помощью датчика веса 1 и электровесопреобразователя 2 измеряется весовой импульс, который при этом интегрируется интегратором 3, корректируется с помощью соответствующих звеньев компенсатора 4 добавочного веса, действующего от координатных измерителей 5 текущего расположения ковша в пространстве. Одновременно весовой импульс визуально фиксируется стрелочным индикатором 6 и поступает на входы компаратора 10 и отсекающего ключа 8. Последний пропускает его на запоминаюш.ий элемент 9. В период окончания загрузки и перемещения ковша, в момент его открывания над транспортной площадкой от действия механизма 26 открывания ковша происходит ераlAribJlTi«J Vy l. UlUf LLIlfl IXVy U.1-U (Д ,Х t 1 Л p LA батывание конечного выключателя 25 (переключатель 24 рода работы при этом находится во включенном состоянии) и запуск одновибратора 21 управления измерением что готовит к срабатыванию блок 13 частотного заполнения разностного сигнала (устанавливает его управляющие триггеры 14, 15 в исходное положение) и выдает запрещающий сигнал на отсекающий ключ 8 блока 7 формирования разностного сигнала, чем вызывает срабатывание отсекающего ключа 8. Отсекающий ключ 8 временно размыкает измерительную цепь, при этом фактическая загрузка ковша фиксируется в конденсаторном запоминающем элементе 9 (на последнем остается напряжение, пропорциональное усилию в грузоподъемном канате при груженом ковше). Логический элемент И 20 блока 19 управления также оказывается подготовленным к работе. Затем полная разгрузка ковша снижает выходное напряжение электровесопреобразователя 2 и вызывает опрокидывание напряжения инвертора 28 узла контроля конца операции разгрузки ковша 27. Последнее через линию задержки 29 (0,3-0,5 с) вызывает срабатывание логического элемента И 20 блока 19 управления измерением, который выдает разрешающее напряжение на работу генератора 12 линейно-изменяющегося (возрастающего) напряжения блока 7 формирования разностного сигнала. Генератор начинает выдавать линейно-возрастающее напряжение на вторые входы компараторов 10, 11 формирования импульсов при порожнем и груженом ковше. В момент равенства линейно-возрастающего напряжения генератора 12 и напряжения на первом входе компаратора 10, соответствующего весу мертвой системы (при разгрузившемся ковше), на выходе компаратора 10 появляется импульс, который опрокидывает сопряженный управляюш,ий триггер 14 блока 13 частотного заполнения разностного сигнала. Соответственно на выход последнего через логический элемент И 16, начинают поступать эталонные тактовые импульсы с генератора 1у тактовых импульсов, которые уходят в цифровой суммируюш.ий блок 18, В момент, когда возрастающее напряжение генератора 12 на входе второго компаратора И достигнет величины напряжения на запоминаюш ем элементе 9, соответствующего весугруженой системы, на выходе компаратора 11 появится напряжение запрета на работу управляющего триггера 15 блока 13 частотного заполнения разностного сигнала, что опрокидывает триггер 15. Логический элемент И 16 срабатывает и прекращает прохождение и подсчет тактовых импульсов с генератора 17. После этого, через 0,5-1 сек, заканчивается время выдержки одновибратора управления измерением 21, тем самым подается опрокидывающее напря жение на возврат отсекающего ключа 8 и логического элемента И 20 в исходное состояние - на режим готовности к следующему взвешиванию. Управляющие триггеры 14, 15 переходят в исходное состояние при следующем срабатывании одновибратора 21 управления измерением. Подбор груза в последнем ковше производится с помощью прибора 6 предварительного измерения по стрелочному измерителю. При этом с помощью ручного переключателя 24 рода работы устройство переводится в ждущий режим (контакт переключателя 24 рода работы разрывается), что дает возможность взвесить оставшуюся часть груза в ковше и просуммировать ее вес с весом уже погруженного груза (после включения переключателя 24). Таким образом, весовой контроль производительности экскаватора производится автоматически в импульсном повторяющемся режиме за время разгрузки ковша над транспортной площадкой, что практически (за счет стабилизации положения рабочих органов экскаватора) ликвидирует динаи ческие ощибки измерения, ослабляет имевшиеся ранее нелинейные искажения контролируемых весовых импульсов, дает возмож- ность их фиксировать в статическом виде. Все это не только увеличивает и фиксирует производительность экскаватора, но и создает непрерывность погрузочных работ, механизирует последние при интенсификации работы доставочного транспорта. Формула изобретения 1. Устройство для контроля производительности одноковшового экскаватора, вклю чающее датчик веса, подключенный к электровесопреобразователю, блок контроля операции разгрузки ковша, суммирующий блок и блок управления, отличающееся тем, что, с целью повыщения точности контроля за счет импульсного измерения веса груза в период разгрузки ковша, оно снабжено последовательно соединенными блоком формирования разностного сигнала и блоком частотного заполаения разностного сигнада, входы которых соединены с выходами блока управления,. ко входам которого подключены два выхода блока контроля операции разгрузки KOBUia, третий выход которого соединен со входами блока формирования разностного сигнала и с выходами электровесопреобразователя, а выход блока частотного заполнения разностного сигнала подключен ко входу суммирующего блока. 2.Устройство по п. 1, отличающееся тем, что электровесопреобразователь выполнен в виде прибора предварительного измерения, компенсатора добавочного веса и подключенных к его входам интегратора весовых импульсов и координатного измерителя текущего расположения ковша в. пространстве. 3.Устройство по п. 1, отличающееся тем, что блок управления выполнен в виде последовательно соединенных одновибратора и логического элемента «И. 4.Устройство по п. 1, отличающееся тем, что блок контроля операции разгрузки ковша выполнен в виде узлов контроля начала и конца разгрузки, первый из которых содержит последовательно соединенные между собой механизм открывания ковша, конечный выключатель и переключатель рода а второй содержит последовательно работ, соединенные инвертор выходного сигнала электровесопреобразователя и линию временной задержки. 5.Устройство по п. 1, отличающееся тем, что блок формирования разностного сигнала выполнен в виде последовательно соединенных ключа и запоминающего элемента двух компараторов и генератора линейноизменяющегося напряжения, выход которого соединен со входами компараторов и выходом запоминающего элемента, соединенного с одним из компараторов. 6.Устройство по п. I, отличающееся тем, что блок частотного заполнения разностного сигнала выполнен в виде логического элемента И и подключенных к его входу двух триггеров и генератора тактовых, имггульсов. Т сточники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 380800, кл. Е 02 F 9/20, 1971. 2. Авторское свидетельство СССР 327306, кл. Е 02 F 9/20, 1969 (прототип).
