1
Изобретение относится к автоматизированным системам управления производственными процессами и может быть использовано в робототехнике в качестве устройства автоматического управления моторным поведением робота (манипулятора) по схеме супервизорного целеуказания.
Известны устройства для супервизорного управления роботом. Устройство 1, содержащее блок слежения, блок целеуказания, блок обратных связей по силе и положению, блок уиравления приводами, преобразователи, вычислительную машину, дисплей и иснолнительные органы, не обеспечивает измерения дальности до объекта манипулирования.
Наиболее близким техническим решением к изобретению является устройство 2J, содержащее пульт уиравления, выходы которого соединены с первыми входами передающей телевизионной камеры, сервоприводов азимута и угла места, вычислителя угловых координат и цифровой вычислительной машины, синхронизатор, выходами подключенный к второму входу передающей телевизионной камеры и первому входу блока визуального отображения, второй и третий входы которого соединены соответственно с выходами передающей телевизионной камеры , и светового пера целеуказания, а выход- с вторым входом вычислителя угловых координат, третий вход которого подключен к второму выходу светового пера целеуказания. Выходы сервопривода азимута и сервопривода угла места соединены соответственно с вторым и третьим входами цифровой вычислительной машины, соответствующие выходы которой иодключены к соответствзющим входам блока управления, выходом соединенного с входами исполнительного органа.
К недостатку этого устройства относится неполная информация о координатах помечаемой оператором на изображении дисплея точки объекта рабочей зоны робота, относительно которой должен ориентироваться исполнительный орган робота - его схват - в нроцессе выполнения заданной технологической задачи. Действительно,
рассмотренная известная схема обеспечивает получение сведений относительно нространственного положення прямой, проходящей через заданную точку измерительной системы и точку объекта, помечаемую оператором в процессе целеуказания на экране дисп„тея. Иначе говоря, такое устройство способно лншь сформировать напрялсение для движения исполнительного органа робота, но не определяет расстояния по лучу
от заданной точки измерительной системы
до интересующей оператора точки на объекте. Отсутствие сведений о дальности утои точки приводит к тому, что динамика перемещений исиолнительного органа робота по лучу-направлению неоптнмальна п ограничена опасностью столкновения. В результате увеличивается время подхода исполпптельного схвата робота к заданной точке объекта, а следовательно, сппжается быстродействие робота при выполнении им поставленной технологической задачи.
Цель изобретения - повышение быстродействия устройства.
Сущиость изобретения заключается в том, что устройство содержит дальномер и блок автоматической ориентации, выходы которого соединены со вторыми входами сервопривода азимута и сервоиривода угла места, а входы - с первым п вторым выходами вычислителя угловых координат, третий выход которого подключен к входу дальномера, выходом соединенного с четвертым входом цифровой вычислительной машины.
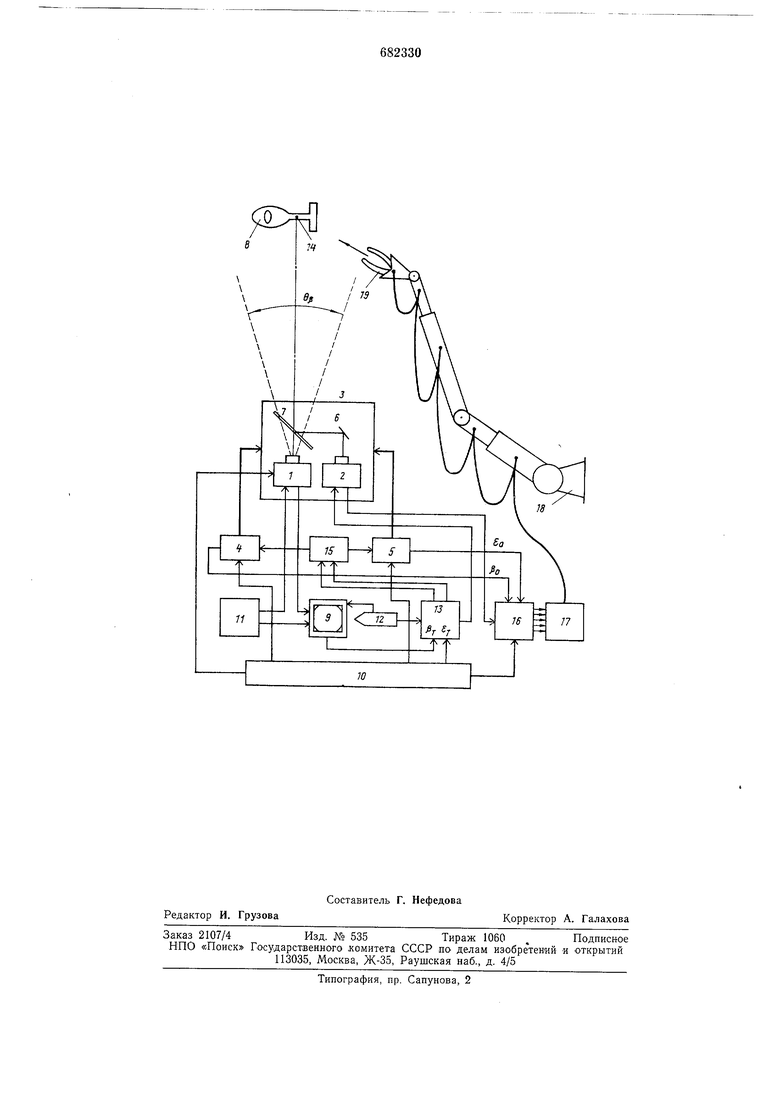
На чертеже приведена блок-схема устройства для супервизорного управления роботом.
Оно содержит передающую телевизионную камеру 1 и лазерный дальномер 2, укрепленные на едпном жестком основании 6, ориентируемом по углам азимута и углам места в пространстве с помощью сервоприводов 4 и 5 азимута п угла места соответственно. Оптические оси иередающей телевизионной камеры 1 и лазерного дальномера 2 совмещены (совпадают между собой в пространстве рабочей зоны робота) при помощи юстировочного зеркала 6 и полупрозрачного отражателя 7. Угол зрения передающей телевизионной камеры 0,-, обеспечивает просмотр объекта 8 рабочей зоны с помощью приемного блока 9 визуального отображения при орнентации (ручной) передающей телевизионной камеры 1 оператором с пульта 10 управления, связанного, Б частности, с унравляющими входами ручного унравлення сервоириводов 4 и 5. Синхронизация ирнемно-иередающего и измерительного телевизионного комплекса осуществлена с помощью синхронизатора 11 кадровых и строчных разверток. В системе целеуказания используется световое неро 12 целеуказания, связанное с вычислителем 13 угловых Координат, помечаемых световым пером целеуказания точек объекта на экране блока 9 визуалыюго отображеиия (помечаемая точка объекта указаиа на последнем под номером 14). Управляющие выходы вычислителя 13 угловых координат связаны с блоком 15 автоматической ориентации измерительного устройства, выходами подключенного к управляющим входам сервоприводов 4 и 5, выходы которых, а также лазерного дальномера 2 подсоединены к цифровой вычислительной машине Ш, связанной с блоком 17 управления пространственного положения исполнительного органа 18, имеющего ехват 19.
Устройство работает следующим образом.
В режиме поиска объекта оператор с помощью органов управления на лзльте 1U н сервоприводов 4 и 5 ориентирует передающую телевизионную камеру 1 так, что на экране блока 9 визуального отображения
возникает изображение интересующего объекта 8 рабочей зоны исполнительного органа 18.
Оператор путем осмотра объекта принимает решение о том, какая точка этого оОъекта - точка 14 должна быть введена в «электронный мозг устройства в процессе целеуказания световым пером 12. Затем оператор острием светового пера указывает требуемую точку 14 изображения объекта 8 на экране блока 9 и нажимает соответствующую кнопку ввода сигнала целеуказания (эта кнопка может быть расположена на пульте 10 либо совмещена со световым пером 12 в форме микроконтакта на
конце пера). Обратная связь светового пера 12 на блок 9 визуального отображения приводит к тому, что в точке экрана блока 9, куда было указано световы.м нером 12, появляется световая метка - электронный
маркер целеуказанпя. Координаты этой метки по строкам и кадрам переситываются в значения соответетвующих азимутов п углов места для лпнип, соедипяющей базовую точку измерительного устройства п
объекта 8. Эти значения азимутальных рт и угломестных ет величин отсчитываются относительно пространственного полол ения оптической оси передающей телекамеры 1, которое само задает значения ази.мута Ро
и угла места 8о по данным угломерных устройств сервоириводов 4 и 5 соответственно. Расчет угловых отклонений линии - нанравления на точку 14 от оптической оеи телекамеры и 8т осуществляется в
вычислителе 13 угловых координат, с которым связаны световое перо 12 целеуказания, блок 9 визуального отображения и пульт 10 управления.
В общем случае изображение точки 14 на
экране блока 9 визуального отображения занимает нроизвольное положение, не совпадающее с центром экрана. Точка центра экрана блока визуального отображения соответствует такому направлению на объект
рабочей зоны, которое совпадает с оптической осью телекамеры 1. В общем случае точка объекта, которая интересует оператора при осуществлении целеуказания, не находится на пересечении с оптической осью
телекамеры, поэтому и ее изображение на экране блока визуального отображения не занимает точку центра экрана.
Сигналы с выхода вычислителя 13 угловых координат подаются по раздельным каналам на блок 15 автоматической ориентации, который преобразует эти угловые сигналы в сигналы управления, поступающие соответственно на управляющие входы сервоприводов 4 и 5. При этом образуется две самостоятельных цепи управления - азимутальная и угломестная и под действием сигналов управления основание 3, а следовательно, и передающая телевизионная камера 1 и лазерный дальномер 2 испытывают такую угловую ориентацию, при которой оптическая ось телекамеры совмещается автоматически с линией - направлением на точку 14 объекта 8. При этом изображение объекта на экране блока 9 визуального отображения таким образом, что изображение точки 14 перемещается к центральной точке экрана и в ней останавливается. На этом заканчивается цикл автоматической ориентации телекамеры 1 на точку 14, так что эта точка объекта, целеуказаниая оператором с помощью светового пера 12 и блока 9 визуального отображения, теперь уже находится на пересечении с оптической осью телекамеры 1. В момент остановки изображения точки 14 в центре экрана блока визуального отображения ВЕЛрабатывается в вычислителе 13 угловых координат сигнал старта лазерного дальномера 2.
По указанному стартовому сигналу включается лазерный дальномер 2. Как было отмечено, его оптическая ось точно съюстирована с оптической осью телекамеры 1, и эта юстировка не изменяется в процессах ориентации измерительной системы в пространстве по азимуту и углу места за счет жесткой установки телекамеры 1 и дальномера 2 на основании 3. Такая юстировка оптических осей приводит к тому, что узколокализованные излучения лазерного дальномера, распространяющиеся вдоль оптической оси телекамеры 1 после отражения от полупрозрачного зеркала, засветят световым пятном малого диаметра объект 8 именно в точке 14. Это также будет видно на экране блока 9 визуального отображения.
Включение лазерного дальномера позволяет измерить дальность между базовой точкой измерительного устройства и точкой 14. Лазерный дальномер 2 при этом может работать с использованием фазовых методов измерения дальности либо на основе многоустойчивых режимов как выраждении фазовых методов.
Значения дальности от лазериого дальномера 2 и угловых координат - азимутов и углов места от сервоприводов 4 и 5 соответственно поступают на вход цифровой вычислительной мащины, где обрабатываются с учетом координат базовой точки измерительного устройства. В результате ЦВМ
рассчитывает координаты точки 14 объекта 8 в рабочей зоне исполнительного органа 18, привязанного также по координатам к той же системе координат, которая используется для определения положения точки 14. Это позволяет через блок 17 управления изменять пространственное положение звеньев исполнительного органа 18 так, чтобы схват 19 прощел но оптпмальной (кратчайщей) траектории к заданной точке объекта за кратчайшее время, определяемое динамическими возможностями приводов исполнительного органа 18.
Применение изобретения позволит значительно повысить быстродействие устройства.
Формула изобретения
Устройство для супервизорного управления роботом, содержащее пульт управления, выходы которого соединены с первыми входами передающей телевизионной камеры, сервоириводов азимута и угла места, вычислителя угловых координат и цифровой вычислительной машины, синхронизатор, выходы которого переключены к второму входу передающей телевизионной камеры и первому входу блока визуального отображения, второй и третий входы которого соединены соответственно с выходами передающей телевпзионной камеры и светового пера целеуказания, а выход - с вторым входом вычислителя угловых координат, третий вход которого подключен к
второму выходу светового пера целеуказания, выходы сервопривода азимута и сервоиривода угла места соединены соответственно с вторым и третьим входами цифровой вычислительной машины, соответствующие
выходы которой подключены к соответствующим входам блока управлепия, выход которого соедипен с входами исполнительиого органа, отличающееся тем, что, с целью повышения быстродействия, устройство содержит дальномер i блок автоматической ориентации, выходы которого сосдпиены соответственно с вторыми входами сервоиривода азимута и сервопривода угла места, а входы - с первым п вторым выходамп вычислптеля угловых координат, третий выход которого подключен к входу дальномера, выход которого соединен с четвертым входом цифровой вычислительной машины. Источники информации,
принятые во внимание при экспертизе
1.Сб. статей под ред. М. Б. Игнатьева. Дистанционно-уиравляемые роботы-манииуляторы. М., Мир, 1976, с. 48-71.
2.Игнатьев Л1. Б. и др. Алгоритмы управления роботами-манипуляторами. Л.,
«Машиностроение, 1972, с. 50-62 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для прокладки маршрута адаптивного промышленного робота | 1980 |
|
SU882734A1 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2019 |
|
RU2701177C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| Система дистанционной передачи визуальной информации телеуправляемого робота | 1981 |
|
SU1182689A1 |
| Устройство для управления адаптивнымРОбОТОМ | 1979 |
|
SU798710A1 |
| Устройство для управления адаптив-НыМ РОбОТОМ | 1979 |
|
SU830304A1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| СИСТЕМА ПОРТАТИВНЫХ КОМПЛЕКТОВ ДЛЯ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ | 2019 |
|
RU2717138C1 |