1
Изобретение относится к вёсоиэме рительной т ехнике.
Известны устройства, предназначенные для измерения массы, в которых уравновешивание измеряемой массы осуществляется гирями, электромагнитами, упругостью пружины 11.
Однако устройства ооладгиот большой инерционностью, подвержены остаточным деформациям, их показания зависят от вибрации, они имеют довольно сложную систему съема информации.
Известны также гироскопические датчики, представляющие собой механическое устройство, состоящее из быстро вращакицегося ротора и колец карданного подвеса 121.
Наиболее близким к предлагаемому по технической сущности является датчик веса, содержащий грузоприемную площадку и трехстепенной гироскоп со смещенным цементом тяжести 13.
недостатком прототипа является недостаточная точность, обусловленная погрешностью от изменения ускорения силы тяжести.
Цель изобретенная - повышение точности взвешивания.
Поставленная цель достигается тем, что в устройстве грузоприемная площадка снабжена стержнем, а наружная рё1мка гироскопа - втулкой, через .которую пропущен этот стержень, опирающийся своим концом на внутреннюю рамку гироскопа.
В основу изобретения положено свойство прюцессии трехстепенного гироскопа со смещенным центром тяжести
0 относительно оси наружной рамки под воздействием силы веса кожуха гиромотора, центр тяжести которого смещен относительно оси его подвеса. Величина угловой скорости прецессии, кото5рая в датчике является выходной физической величиной, линейно зависит от приложенной силы веса и характеризуется известным отношением
20
где m - масса кожуха, приведенная
к центру тяжести гиромотора с кожухом/
9 - ускорение силы тяжести;
fr - величина смещения центра тяжести относительно оси подвеса кожуха;
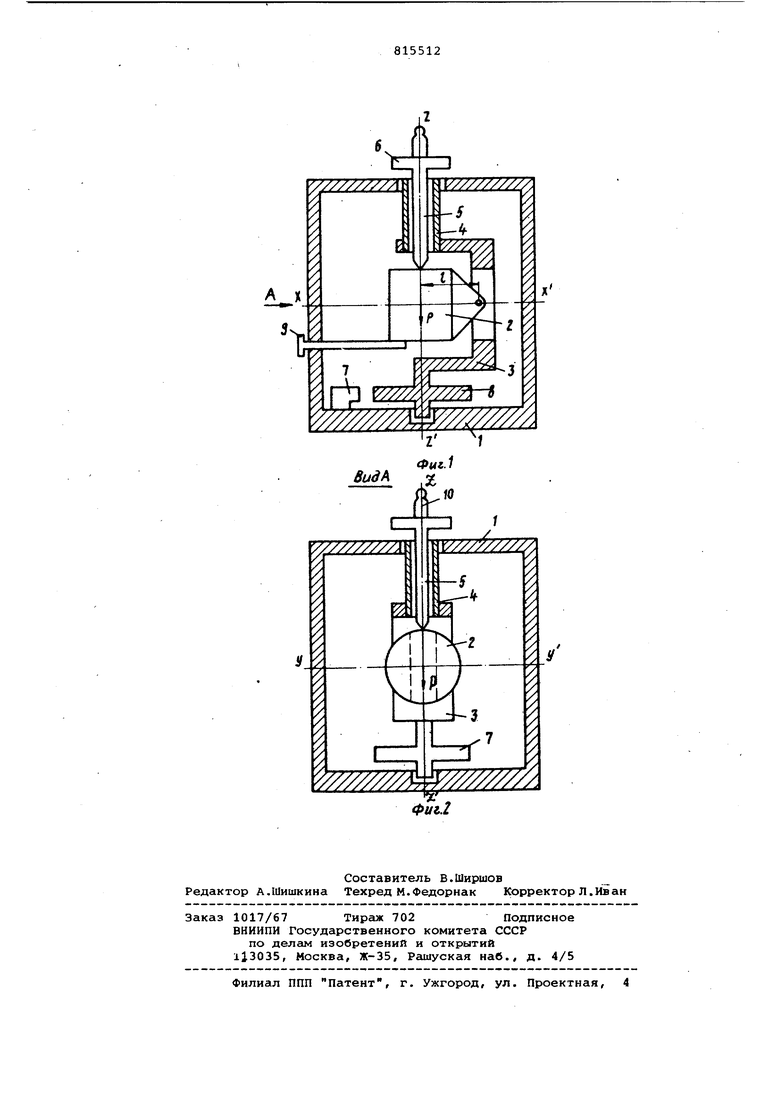
Н - кинетический момент ротора гиромотора. На фиг. 1 схематически изображен предлагаемый датчик веса, на фиг. 2 вид А на ФИГ. 1 Датчик веса состоит из корпуса 1 гиромотора с осью главного вращения х-х, заключенного в кожух 2, представляющий собой внутреннюю рамку ,трехстепенного гироскопа, и подвешенный к наружной рамке 3 так, что его центр тяжести смещен относительно оси подвеса у-у на величину t . Наружная рамка 3 имеет возможность вращения относительно оси Z-z . Для измерения массы тел наружная рамка 3 имеет втулку 4, через которую пропущен стержень 5, опирающийся своим ни ним концом на кожух 2 гиромотора.. На верхнем конце стержня 5 закреплена грузЬприемная площадка б, предусмотренная Д.ГШ размещения измеряемой массы, аервичмый измерительный преобразо ватель 7 служит для преобразования . угловой скорости вращения жестко закрепленного на наружной рамке 3 диска 8 в электрический сигнал. Перед началом взвешивания кожух 2 гиромото ра зафиксирован арретиром 9 и приложенный к кожуху момент сил относительно оси У-У, за счет масс стержня 5 и грузовой площадки, уравновеше реакцией опоры арретира 9. Работает датчик следующим образом После изготовления датчика неооходимо определить качашьную скорость прецессии iOo, обусловленную смещение центра масс гиромотора с кожухом 2 и стержня 5 с грузоприемной площадкой б оез учета измеряемой массы, она ха рактеризуется соотношением т с начальная масса; масса гиромотора; т масса стержня.с грузоприемной площадкой; t - расстояние от центра масс до оси У-У. Для оценки величины «Ор необходимо разарретировать кожух 2, не устанавл вая массу 1и. Под действием веса гир мотора с кожуком 2 и стержня 5 с гру зо1;1риемной площадкой б начинается прецессия наружной рамки 3 вокруг ос 2-jZ с угловой скоростью УО которую ндано измерить при помощи преобразователя 7. Установив .затем на грузо Б измеряемую массу приемную площадку 10, определяют новое значение угловой скорости прецессии t)-t, которое имеет вид . .ImiJZVLiJ, и где m измеряемая масса. Так как в одном и том же месте земной поверхности ускорение силы тяжести для всех тел имеет одно и то же значение, то после деления (и) на )о получим . - йЭБ где тр const для данного датчика. Реализация полученного соотношения с помощью микропроцессора не вызывает трудностей, что позволяет автоматизировать процесс взвешивания и вычисления массы. Технико-экономическое значение предлагаемого устройства заключается IB том, что гироскопические датчики Обладают высокой точностью, технология их изготовления хорошо освоена промышленностью, удобство съема информадии позволяет автоматизировать процесс взвешивания и применить наиболее точные частотные методы и средства измерений. К достоинствам предлагаемого датчика относится его безинерционность, так как прецессия начинается мгновенно при нагружении измеряемой массой. ато СВОЙСТВО особенно ценно при непрерывном контроле изменяющейся массы. Формула изобретения Датчик веса, содержащий грузоприемную площадку и трехстепенной гироскоп со смещенным центром тяжести, отличающийся тем, что, с целью повьш1ения точности, грузоприемная площадка снабжена стержнем, а наружная рамка гироскопа - втулкой, через которую пропущен этот стержень опирающийся своим концом на внутреннюю рамку гироскопа. Источники информации, принятые во внимание при экспертизе 1.Щедровицкий С.С. Техника измерения массы. М., Стандартгиз, 1961, с. 8. 2.Справочник по радиоэлектронике. Под ред. Куликовского А.А. М., Энергия,1968, том 2, с. 477. 3.Абторское свидительство СССР W 175677, кл. G 01 G 9/00 , 1964 (прототип).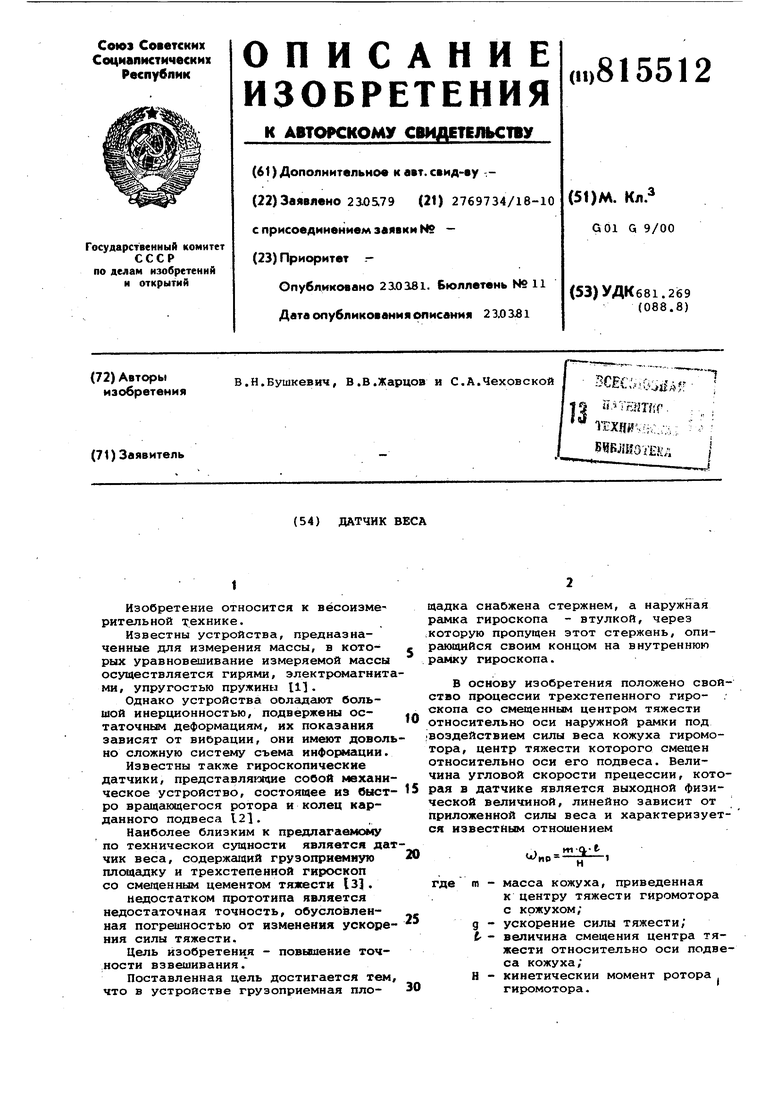
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ ОСЕВОГО СМЕЩЕНИЯ ЦЕНТРА ТЯЖЕСТИ ГИРОМОТОРА | 1973 |
|
SU376677A1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ УГЛОВОГО ДВИЖЕНИЯ | 2001 |
|
RU2206899C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Устройство для измерения кривизны горизонтальных и наклонных скважин | 1983 |
|
SU1141187A1 |
| Учебный прибор по механике | 1987 |
|
SU1497633A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
| ИМПУЛЬСНЫЙ ТРЕХСТЕПЕННЫЙ ГИРОСКОПИЧЕСКИЙ ПРИБОР, СПОСОБ ЕГО ЗАПУСКА И СПОСОБ ВЗВЕДЕНИЯ СПИРАЛЬНЫХ ЛЕНТОЧНЫХ ПРУЖИН ИМПУЛЬСНОГО ТРЕХСТЕПЕННОГО ГИРОСКОПА | 2001 |
|
RU2196963C1 |