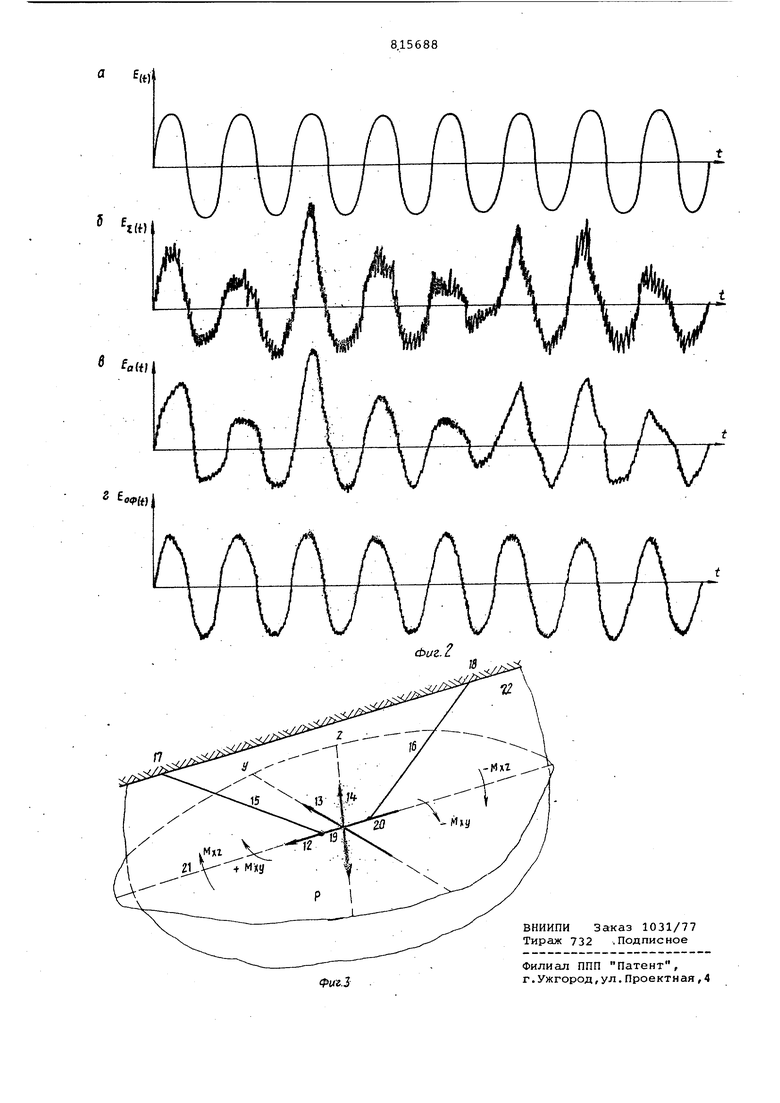
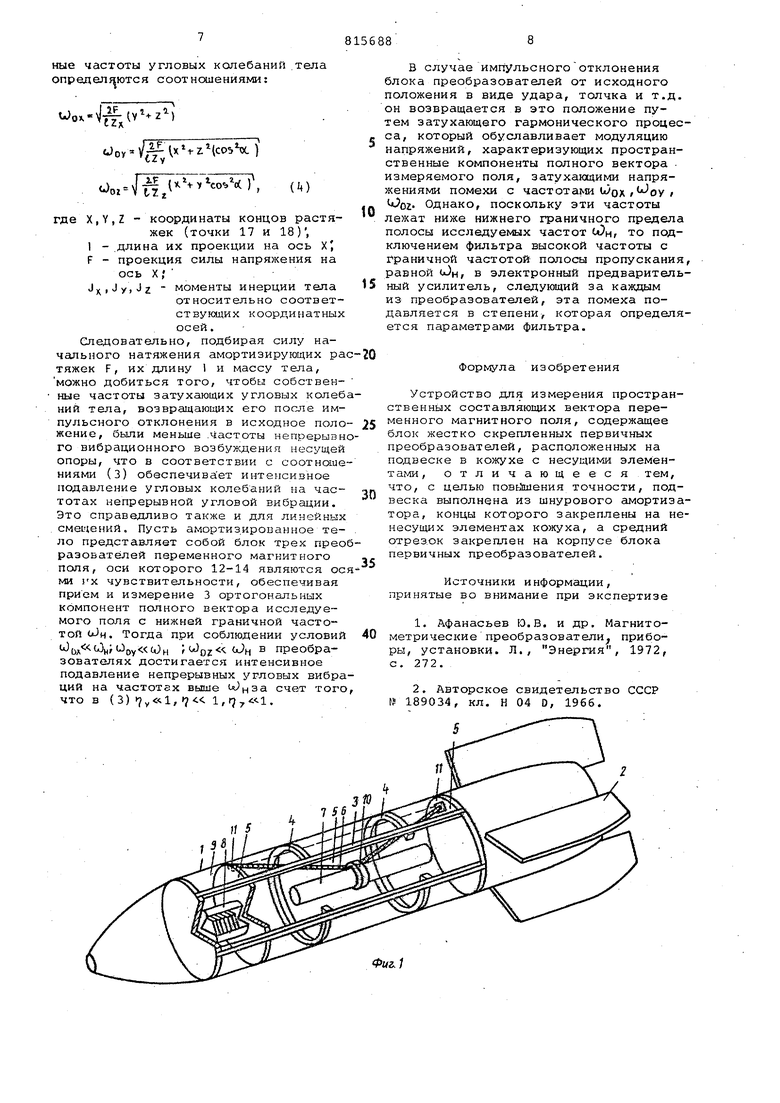
Изобретение относится к технике магнитных измерений и технике радио связи и предназначено для приема и измерения искусственных и естественных переменных магнитн лх полей на д жущихся носителях приемно-измеритель ной аппаратуры: самолетах, вертолв тах, кораблях - при геофизических съемках и приеме радиосигналов.. Известны устройства с предварительным электронным усилителем и защищающего от акустических и механических воздействий окружанадей среды кожуха, который может быть установлен на корпусе носителя или буксироваться им на тросе-кабеле 11. Недостаток указанных устройств заключается в невысокой точности измерений. Известно также устройство, содерхсащее блок, жестко скрепленных первичных преобразователей, расположенных на подвеске в кожухе 12. Однако в указанном устройстве за счет отсутствия момента вращения не достигается пространственная стабили зация преобразователей относительно направления вектора измеряемого магнитного поля или его пространственны составлянмцих в заданных условиями из мерений направлениях, поскольку при случайных толчках или иных воздействиях большой интенсивности на устройство преобразователи могут занять произвольное положение, не контролируемое в ходе измерений. Цель изобретения - повышение точности измерений. Поставленная цель достигается тем, что в устройстве для измерения про странственных составляющих вектора переменного магнитного поля, содержащим блок жестко скрепленных первичных преобразователей, расположенных на подвеске в кожухе с несущими эле- ментами, подвеска выполнена из шнурового амортизатора, концы которого закреплены на несущих элементах кожу « ха, а средний отрезок закреплен на корпусе блока первичных преобразователей , На фиг. 1 приведена конструкция устройства; на фиг. 2 - эпюры возникающих в приемно-измерительном канале напряжений во время измерений в сравнении с напряжениями, одно из которых характеризует измеряемое магнитное поле, а второе - процесс в приемно-измерительном канале при отсутствии предполагаемого устройства виброакустической защиты; на фиг. 3 кинематическая схема устройства. Устройство состоит из несущего и защищающего блок преобразователей от механических и акустических воздействий окружающей среды кожуха 1 в виде удлиненной обтекаемой гондолы кругового поперечного сечения с хвостовым стабилизатором 2, которая усилена внутри продальнЕ 1ми стяжками 3 и поперечными кольцами 4 жесткости. К несущим элементам 5 на шнуровом амортизаторе б подвешен блок 7 первичных преобразователей переменного магнитного поля. Электронные предварительные усилители 8 с подключенными к ним фильтрами высокой частоты, собран ные на общем шасси, установлены в переднем отсеке 9 кожуха 1. Средний отрезоК амортизатора б, прижатый к корпусу блока 7 преобразователей узлом 10 крепления, вместе с его отрезками от узла 10 до узлов 11 крепления на несущих элементах 5 кожуха и условной линией между центрагл узлов 11 образу ют обозначенный пунктиром силовой контур, особенностью которого является то, что в силу упругости его боко вых, сторон (отрезки узлов 11-10 и узлов 10--11 амортизатора) он обладает свойством не только подавлять поступ ющую с несущих элементов 5 вибрацию, но и восстанавливать начальную прост ранствсгнную ориентгидию блока. 7 преоб разователей, если он будет выведен и нее ударом, толчком, и т.п. Это свой ство и лозволнет использовать устрой ство не только для непосрсгдственного подавления обусловленных вибрацией помех, но и для стехбилизации простра ственг-ого положения, блока преобразов телей и. следовательно, существенного уменьшения погрешности измеренр$я пространственных .составляющих вектора переменного магнитьгого поля, связанной со случайныг-я-1 отклонениями блока от заданной ориентации во врем движения. Вместе с тем, самоориентация блока преобразователей без нарушения изложенного принципа может быть осуществлена с помощью двух амор7-изаторов , концы которых на блоке преобразователей жестко закреплены в двух узлах, отнесенных друг от друга по поверхности блока. Б этом случае отп дает необходимость использования отрезка, прижатого к поверхности блока (не показано). Работа устройства ос адествляется следующим образом. Принимают,и за дищают от помех одну пространственную составляющую сиг нала гармонического искусственного источника, магнитное поле которого характеризуется гармоническим электрическим напряжением E(t) на выходе преобразователя при условии, если на него не воздействует вибрацион ая помеха (фиг. 2а).. В процессе двиения во время измерений кожух 1 (гондола) испытывает непрерывные и мпульсные виброакустические воздейтвия под влиянием встреччого потока (воздух, вода), работы двигателя на носителе , колебаний буксировочного троса, которые в сумме занимают широкую полосу частот и могут быть охарактеризованы искажениями сигнала если бы он был преобразователе жестко укреплен на.корпусе защитного , кожуха 1 (фиг. 26). Процесс Ej(t).представляет собой сумму измеряемого сигнала E(t), помехи за счетнепрерывной широкополосной вибрации в полосе пропускания приемно-измерительного канала (размытость линий синусоиды) и помехи за счет колебаний блока 7 преобразователей в магнитном поле Земли под действием толчков и ударов (низкочастотная модуляция синусоиды). В процессе движения на узлы 10 и 11 крепления концов амортизатора б на несущих элементах 5 кожуха 1 поступают непрерывная вибрация и толчки в широком спектре частот. Энергия вибраций и толчков 3 полосе частот, в которой производятся измерения переменного магнитного поля, подавляется в амортизаторе 6, материал и геометрические размеры которого подобраны в соответствии с выводами теории колебаний тела на упругой подвеске, что позволяет подавить электрическую помеху в преобразователе па 40 децибел. Ослабление . помехи в полосе измерений схематически изображено в виде ос 7-зблен1я разм лтости линии графика, описывающего процесс EQ( t) (фиг. 2в). Однако на частотах ниже граничной частоты измерений магнитного поля помеха не ослабляется, поскольку, когда после толчка блок 7 пре.образователей отклоняется от заданной ориентации, то возникающие из-за растяжения упругих боковых сторон трапециевидного контура вращательные моменты возбуждают затухаквдий колебательный процесс, возвращающий блок 7 к заданной ориентации. Этот процесс является причиной возникновения в преобразователях помехи с собственной частотой контура U)Q, несущего блок 7 преобразователей, которое действует в виде модуляции принимаемого сигнала. Для того, чтобы подавить эту помеху, напряжение EQ(t) подается в электронный предварительный усилитель 8 с подключеиньйм к нему фильтром высокой частоты с частотой среза, равной нижней граничной частоте измеряемого магнитного поля . В результате фильтрации модуляция подавляется на 40-60 децибел, и процесс преобразуется в напряжение Еаф(1), в котором помеха подавлена по всему спектру защищаемой полосы частот и которое с минимальной погрешностью характеризует измеряемой магнитное поле (фиг. 2г). При измерении естественного магнитного поля, представляющего собой широкополосный случайный процесс, ус ройство действует по отнсигению к каждой из спектральных составлякхцих этого процесса в полосе измерения т ким же образом, как к гармоническому магнитному полю искусственного ис,точника, обеспечивая завдитный эффект одновременно во всей защищаемой полосе частот. Предлагаемое устройство позволяет подавлять непрерывную импульсную помеху за счет вибраций и толчков при движении носителя путем введения амортизирующей подвески в виде трапецевидного контура, которая в силу своего свойства восстанавливать ориентацию преобразователей после случайного их отклонения ив сочетании с фильтрацией высокой частоты в соот ветствующих фильтрах усилителей позволяет связать процессы Басо(с) иE{t) строго определенным линейным, соотношением и тем самым обеспечить измерения амплитуд полноговектора поля, и его пространственных составляющих с высокой точностью. Одним из основных условий эффекти ности работы устройства является соб людение принципа выбора соотношения между нижней - граничной частотой из меряемого магнитного поля (t), опред ляемой условиями и Зсщачаьли измерений поля или приема сигнала, и собственной частотой механического кол бательного трапецевидного контура с упругими боковыми сторонами. Принцип, положенный в основу выбора это соотношения, заключается в следующем Если тело с осями 12-14,, в исходном статическом пол.ожении совпадакацими с осями (х), (Y) и (Z) заданной сист мы координат, подвесить на упругих растяжках 15 и 16 к точкам 17 и 1§ колеблющейся конструкции таким образом, чтобы точки крепления растяжек к телу 19 и 20 г.е совпадали о центром тяжести тела, обозначенным началом вектора силы тяжести Р, то закон колебаний тела по любой из его 6 степеней свободы (3 поступательных и 3 вращательных) - в соответствии с теорией колебаний будет описываться дифференциальным уравнением m)+(l+ijf,)C)(l+ir,)CAcospt, (1) где V - линейное или угловое смещение любой из точек тела отно сительно их исходного положения в условиях статическое го равновесия; TM - коэффициент неупругого сопротивления материала растя . ки;, С - жесткость растяжки; А - амплитуда смещения колебающейся несущей конструкции; р - частота смещения несущей конструкции;t - текущее время. Решение уравнения (1) представляет собой сумму С06{(Jot ) дVf:libL - «ojpt (2 ) о I в| первое слага:емое которой описывает собственные колебания упругой .системы, т.е. ее реакцию на импульсное возбуждение с собственной частотой 0, а второе - вынужденные колебания с частотой р смещения несущей конструкции. В уравнении (2) через Г обозначено отношение частоты конструкции к собственной резонансной частоте механического колебательного -контура, а В - величина магнитной индукции. Подбором значений коэффициента неупругого сопротивления материала растяжек и отношения частот вынужденных и собственных колебаний конструкции можно добиться выполнения соотношений, / 1-х)Чгм гдеЗ, что обеспечивает подавление непрерывной вибрации на частотах несущей конструкции. Для анализа возможностей сохранения заданной ориентации рассмотрим кинематику амортизирующей системы (фиг. 3 .Под действием импульсного возбуждения создается угловое отклонение осей тела 12 и 13 в плоскости 21 осей (X) и (Y). Тогда под действием этого отклонения произойдет нарушение .равенства растяжений в растяжках 15 и 16 вследствие чего в этой плоскости возникнут равные по величине и противоположные по направлению моменты МХУ И -НХУ , из-за которых тело испытывает затухающие угловые колебания с собственной частотой и)ох г скорость затухания их определяется коэффициентом Тм в показателе экспоненциального множителя первого слагаемого в (2), и в конечном итоге займет исходное положение с заданным направлением осей 12 и 13 вдоль координатных осей X и Y. Аналогичные затухающие колебания тела с частотой t«Joz под действием моментов и -Mxz возникают при импульсном возбуждении в плоскости 22 осей X и Z и с частотой в плоскости осей Y и Z, которая на фиг. 3 не выделена. После затуханий этих колебаний система осей тела также займет исходное положение. Для амортизирующей подвески центры концов которой образуют,вершины равнобочной трапеции с of мезаду основанием (точки 17-18) и боковыми стоонами. (точки 17-19 и 13-20)усобстввнные частоты угловых колебаний тела определяются соотношениями: tJo.( (Jor-v V I V) 01 Ш7 где X,Y Z - координаты концов растяжек (точки 17 и 18), 1 - .длина их проекции на ось У., f - проекция силы напряжения на ось X; J),Jy, Jz моменты инерции тела относительно соответствующих координатных осей. Следовательно, подбирая силу начального натяжения амортизирующих ра тяжек F, их длину 1 и массу тела, можно добиться того, чтоби собственные частоты затухающих угловых колеб ний тела, возвращающих его после импульсного отклонения в исходное поло жение, были меньше .частоты непрерыв го вибрационного возбуждения несущей опоры, что в соответствии с соотнсхие ниями (З) обеспечивает интенсивное подавление угловых колебаний на частотах непрерывной угловой вибрации. Это справедливо также и для линейных .сме1чений. Пусть амортизированное тело представляет собой блок трех прео разователей переменного магнитного поля, оси которого 12-14 являются ос ми х чувствительности, обеспечивая прием и измерение 3 ортогональных компонент полного вектора исследуемого поля с нижней граничной частотой tJn. Тогда при соблюдении услови преобразователях достигается интенсивное подавление непрерывных угловых вибр ций на частотах вкоче счет тог что в (3) ,tj« 1,. В случае импульсногоотклонения блока преобразователей от исходного положения в вида удара, толчка и т.д. он возвращается в это положение путем затухающего гармонического процесса, который обуславливает модуляцию напряжений, характеризующих пространственные компоненты полного вектора . измеряемого поля, затухающими напряжениями помехи с чacтoтa и . Однако, поскольку эти частоты лежат ниже нижнего граничного предела полосы исследуемых частот и)нг то подключением фильтра высокой частоты с граничной частотой полосы пропускания, равной х)н, в электронный предварительный усилитель, следующий за каждым из преобразователей, эта помеха подавляется в степени, которая определяется параметрами фильтра. Формула изобретения Устройство для измерения пространственных составляющих вектора переменного магнитного поля, содержащее блок жестко скрепленных первичных преобразователей, расположенных на подвеске в кожухе с несущими элементами, отличающееся тем, что, с целью повьйшения точности, подвеска выполнена из шнурового амортизатора, концы которого закреплены на ненесущих элементах кожуха, а средний отрез.ок закреплен на корпусе блока первичных преобразователей. Источники информации, принятые во внимание при экспертизе 1.Афанасьев Ю.В. и др. Магнитометрические преобразователи приборы, установки. Л., Энергия, 1972, с. 272. 2.Авторское свидетельство СССР № 189034, кл. Н 04 О, 1966.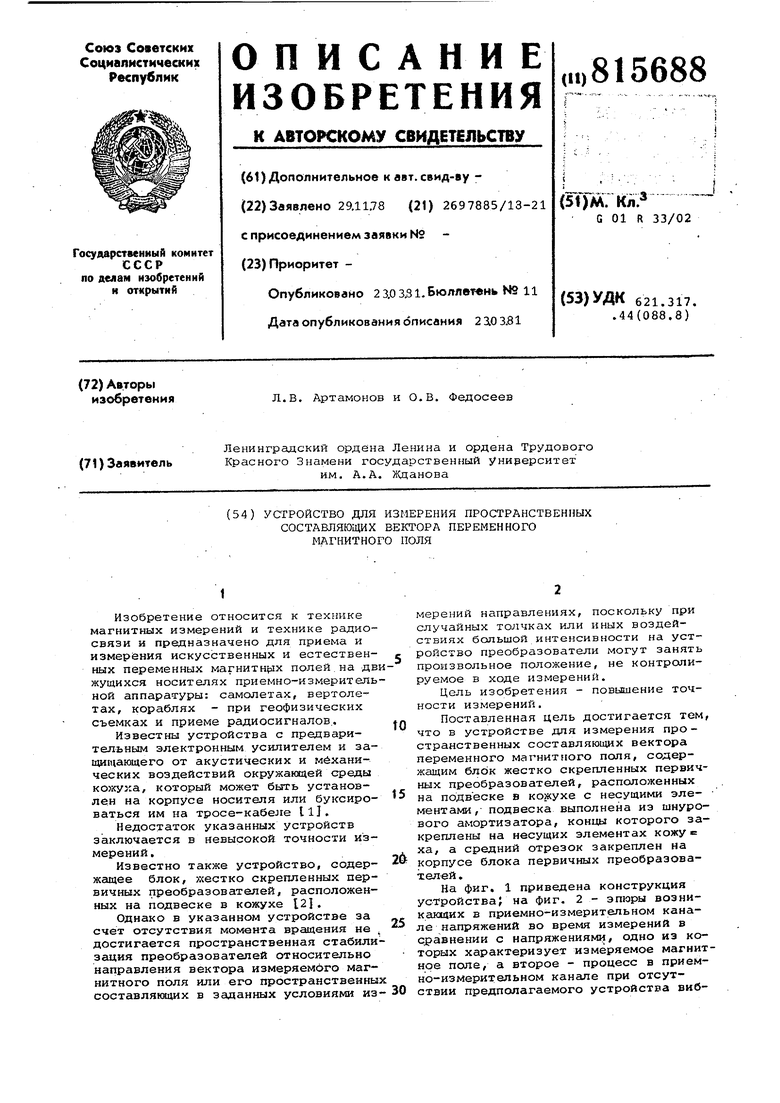
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения переменного магнитного поля | 1981 |
|
SU1004925A1 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| Способ вибрационных испытаний авиационных управляемых ракет в сборе на прочность при воздействии широкополосной случайной вибрации | 2019 |
|
RU2731019C1 |
| Устройство для измерения переменного магнитного поля | 1982 |
|
SU1129574A2 |
| Машинный агрегат | 2022 |
|
RU2773763C1 |
| СПОСОБ ГРАВИТАЦИОННОЙ ГРАДИОМЕТРИИ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2298211C2 |
| Устройство для измерения переменного магнитного поля | 1982 |
|
SU1081575A2 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2013 |
|
RU2562149C2 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| ГРАДИЕНТОМЕТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 2010 |
|
RU2439623C1 |