(54) ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ОРГАНАМИ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ СУДНА

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Дистанционный привод управления главным судовым двигателем /варианты/ | 1983 |
|
SU1191357A1 |
| Дистанционный привод исполнительного устройства реверса и изменения частоты вращения главного судового двигателя с однорукояточным постом управления | 1981 |
|
SU982970A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2340489C1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1975 |
|
SU699218A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2000 |
|
RU2184664C2 |
| Электрогидравлический дистанционный привод | 1975 |
|
SU557208A1 |
| Автоматическая система управления силовой установкой | 1983 |
|
SU1149044A1 |
| ВСЕСОЮЗНАЯ I | 1969 |
|
SU245490A1 |
| Гидропривод затвора гидротехнического сооружения | 1989 |
|
SU1684409A1 |
Изобретение относится к судостроению, в частности к электрогидравлическому приводу системы управления органг1МИ стабилизации движения судна
Известен электрогидравлическия првод системы управления органами стабилизации движения судна, содержащий гидравлические приводы, соединенные с поворотными стабилизаторами, шарнино связанными с основанчем крыла и корпусом судна, и фиксаторы установленных положений стабилизаторов, кинематически связанные с гидравлическими приводами фиксаторов, расположенными также, как и гидравлически приводы стабилизаторов, внутри корпуса судна,при этом гидравлические приводы стабилизаторов обоих бортов и фиксаторов подключены гидравлическими каналами попарно к электрогидравлическим преобразователям, управляющие обмотки которых подключены электрически к командным органам управления фиксацией и поворотом стабили заторов р-З Недостатком устройства является недостаточная надежность из-за возможности поломки фиксаторов или привод стабилизаторов в случае, еели перемещение стабилизаторов на
подъем или опускание начато при неполностью отпущенных фиксаторах.
Цель изобретения - повышения надежности электрогидравлического привода системы управления органами стабилизации движения судна.
Поставленная цель достигается тем что привод снабжен сигнгшьным устройством, датчиками положенийстабилизаторов и фиксаторов, автоматическим переключателем с управляющим звеном, включенным в командные каналы между командным органом управления фиксацией стабилизаторов и командным органом управления поворотом стабилизаторов и подключенным к сигнальному устройству, при этом переключатель и сигнальное устройство подключены к датчикам положений стабилизаторов и фиксаторов.
Управляющее звено переключателя состоит из логического элемента И, подключенного своими входами к источнику питания при помощи датчиков положения фиксаторов и выходом подключенного к командному органу управления поворотом стабилизаторов, при чем к последнему параллельно с выходом логического элемента ,И при помощи шунтирующего замыкателя подключей источник питания, а сигнешьно устройство выполнено световым.
Кроме того, датчики положения стабилизаторов и фиксаторов выполнены в виде концевых выключателей, взаимодействунмОих со штоками гидравлических приводов внутри корпуса сулна.
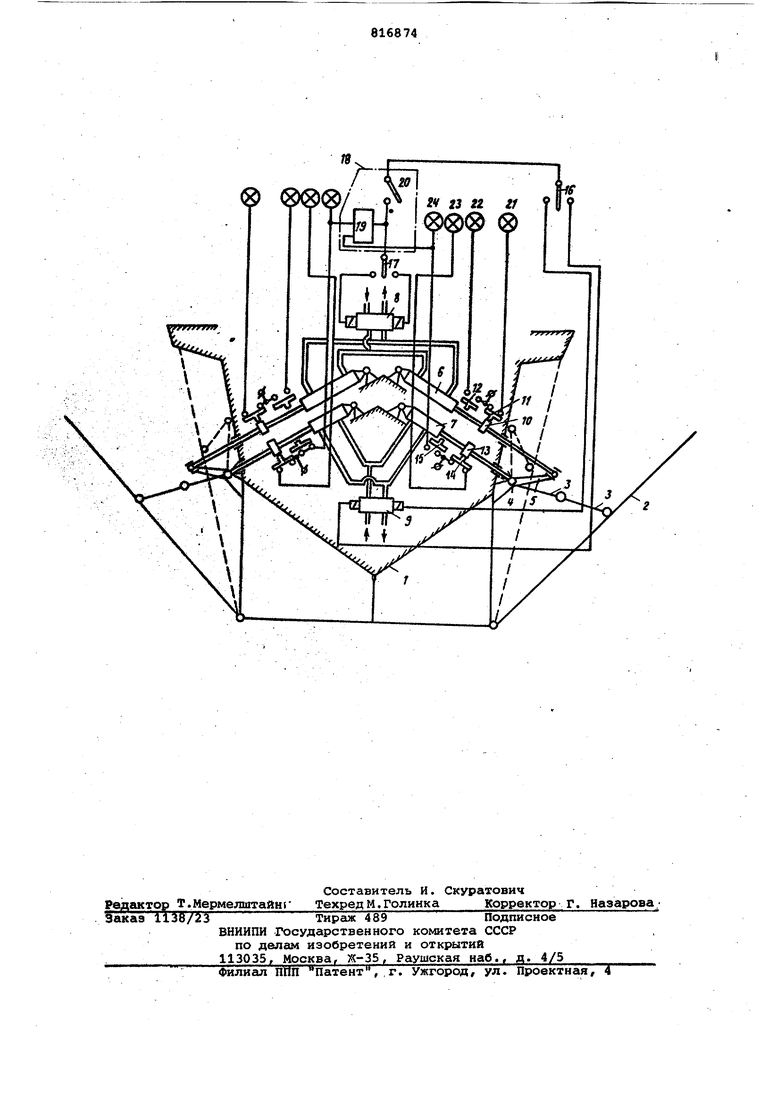
На чертеже изображена схема предлагаемого устройства.
К корпусу 1 судна прикреплены стабилизаторы 2 при помощи шарнирно соединенных со стабилизатором серег 3 и оси 4, на которой закреплен рычаг 5, кинематически связанный с гидроприводом б. Ось 4 взаимодействует с гидроприводом 7 фиксатора установленного положения стабилизатора (в поднятом или опуиенном положении последнего) .
Гидроприводы 6 левого и правого борта управляются электрогидравличесКИМ преобразователем 8, а гидроприводы 7 фиксаторов - электроги равлическим преобразователем 9.
Шток 10 гидропривода б взаимодействует с датчиками положений стабилизаторов концевыми выключателями 11 сигнализации опущенного положения стабилизатора 2 и 12 - поднятого положения,
Шток 13 гидропривода 7 фиксатора взаимодействует датчиками положений фиксаторов с концевыми выключателями 14 сигнализации зафиксированного положения стабилизатора 2 (в поднятом или опущенном положении) и 15- расфиксированного положения (перед подъемс 1 или опусканием стабилизатора). Шток 13 совместно с осью 4 и рычагом 5 образует фиксатор стабилизаторов.
Преобразователь 9 подключен своими обмотками к источнику питания (не показан) при помощи командного органа 16 управления фиксацией, а преобразователь 8 - при помощи последовательно связанных командного органа 17 управления поворотом стабилизаторов и автоматического переключателя 18.
В автоматическом переключателе управлягацее звено - логический элемент 19 И - своими входами подключено к источнику питания при помощи кони.евых выключателей 15 сигнализации расфиксированного положения стабилизаторов правого и левого борта, а выходом - к командному органу 17. Шунтирующий замыкатель 20 в переключателе 18 соединяет источник питания со входом командного органа 17 параллельно элементу 19 И и концевым шлключателем 15.
Концевые выключатели 11 и 12, 14 и 15 сигнёшизации подключены к сигнальному устройству, состоящему из ламп 21-24.
Схемы для левого и правого борта полностью идентичны, поэтому номера
позиций указаны только для схемы правого борта.
Устройство работает следующим образом.
В,опущенном положении стабилизаторы 2 находятся в крайнем отклоненном состоянии относительно корпуса судна. Серьги Э расперты на шарнирах крепления их к стабилизаторам 2, оси 4 и между собой и рычажная система зафиксирована в установленном поло0жении гидроприводом 7, шток 13 которого полностью вьадвинут и фиксирует ось 4.
При необходимости поднять стабилизаторы 2 (при проходе узкостей в
5 водоизмещающем положении, при швартовке, входе в док и т.п.) командный орган 16 переводят в положение снятие фиксаторов. При этом питание от источника подается на соответст0вующую управляклцую обмотку преобразователя 9, который подает гидросмесь от источника рабочей жидкости (не показан) в крайние по отношению к борту полости гидроприводов 7 правого и левого борта. Штоки 13 этих
5 гидроприводов отводятся от осей 4, освобождая их для подъема стабилизаторов 2. При этом размыкаются выключатели 14 и закмкаются выключатели 15, гаснут лампы 23 и загораютDся лампы 24..
После замыкания выключателей 15 как левого, так и правого борта на выходе элемента 19 И появляется сигнал разрешения подъема стабилизато5ров 2, поступающий на командный орган 17.
Переводом органа 17 в положение подъем стабилизаторов подается сигнал на соответствующую обмотку
0 преобразователя 8, который подает гидросмесь от источника в крайние по отношению к борту полости гидроприводов б правого и левого борта. Штоки 10 гидроприводов 6 через рычаги 5, поворачивают оси 4 и через серьги
5 3, которые при этом поворачиваются вокруг своего центрального шарнира и складываются, поднимают стабилизаторы 2, прижимая их к борту корпуса 1 и убирая их при этом под
0 кринолин. Перемещение штоков 10 продолжается до тех пор, пока не погаснут лампы 21 и не загорятся лампы 22.
После этого командный орган 16 переводится в положение постановка
5 фиксаторов. Питание от источника подается на другую обмотку преобразователя 9, подающего гидросмесь в полости гидроприводов 7, обеспечиваю11(ие выдвижение штоков 13. Эти штоки фик0сируют оси 4 и связанные с ними через, серьги 3 стабилизаторы 2 в поднятом положении. Гаснут лампы 24 и загораются лампы 23.
Поршни гидроприводов 6 и 7 фиксируются в крайних положениях гидро-;
5 замками, встроенными в преобразователи 8 и 9. При необходимости опустить стабилизаторы 2 в рабочее положение опе рации повторяются в обратном порявдке В случае поломки или разрегулиров ки выключателей 15 замыкатели 20 шун тируют выход элемент 19 И и эти выклю чатели, подавая на вход органа 17 питание непосредственно от источника питания. При этом, контроль за постановкой и снятием фиксаторов осуществляют В1й уально, например по величине входа штока 13 гидропривода 7. Предлагаемое устройство повышает надежность системы управления подъемом и опусканием стабилизаторов и исключает оишбки оператора при управлении. Формула изобретения 1. Электрогидравлический привод системы управления органами стабилизации движения судна, содержащий гидравлические приводы, соединенные с поворотными стабилизаторами, шарнирно связанными с основанием крыла и корпусом судна, и фиксаторы установленных положений стабилизаторов, кинематически связанные с гидравлическими приводами фиксаторов, расположенными также, как и гидравлические приводы стабилизаторов, внутри корпуса судна, при этом гидравлические приводы стабилизаторов обоих бортов и фиксаторов подключены гидравлическими каналами попарно к элек трргидравлическим преобразователям, управляющие обмотки которых подключены электрически к командным органам управления фиксацией и поворотом стабилизаторов, отличающийс я тем, что, с целью повышения надежности, привод снабжен сигналь- . ным устройством, датчиками положений стабилизаторов и фиксаторов,автоматическим переключателем с уп- равляющим звеном, включенным в командные каналы между командным органом управления фиксацией стабилизаторов и командным органом управления поворотом стабилизаторов и подключенным к сигнальному устройству, при этом переключатель и сигнальное устройство подключены к датчикам положений стабилизаторов и фиксаторов. 2.При вод по п. 1, отличающийся тем, что управляющее звено переключателя состоит из логического элемента И, подключенного своими входами к источнику питания при помощи датчиков положения фиксаторов и выходом подключенного к командному органу Управления поворотом стабилизаторов, причем к последнему параллельно с выходом логического элемента И при помощи шунтирующего замыкателя подключен источник питания, а сигнальное устройство выполнено световым. 3.Привод по п. 1, о т л и ч а ющ и и с я тем, что датчики положения стабилизаторов и фиксаторов выполнены в виде концевых выключателей, взаимодействующих со штокалш гидравлических приводов внутри корпуса судна.. . Источники информации, принятые во внимание при экспертизе 1. Патент СШ; .2931747, кл. 114-66.5, опублик. 1969.
