(54) ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ

| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов | 1979 |
|
SU816933A1 |
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Захватное устройство для подъема и транспортирования бесподдонных пакетов кирпича | 1991 |
|
SU1789489A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ГРУЗОВ С ВЕРТИКАЛЬНЫМ ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1991 |
|
RU2013350C1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Захватное устройство для грузов с центральным отверстием | 1984 |
|
SU1189783A1 |
| Вешалка для одежды | 1984 |
|
SU1279605A1 |
| Захватное устройство для грузовС цЕНТРАльНыМ ОТВЕРСТиЕМ | 1978 |
|
SU810598A1 |
| Захватное устройство для изделий с конусной вертикальной полостью | 1990 |
|
SU1740303A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
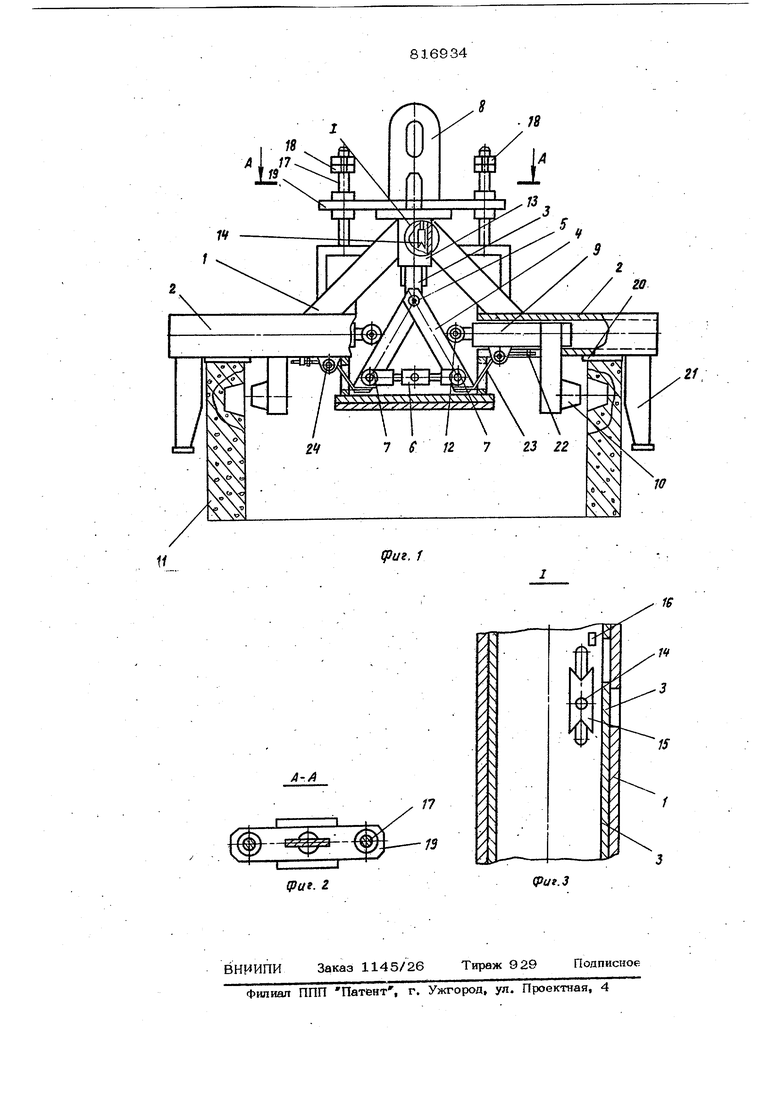
Изобретение относится к подъемнотранспортному оборудованию, а именно захватным устройствам для грузов. Известно захватное устройство для грузе, содержащее корпус с горизонта пьными направляющими, в котором уста новлена подвижно штанга с распорным элементом, взаимодействующим с захват ными органами, установленными с возможностью перемещения в горизонтальных направляющих, н механизм фиксации положения захватных органов ij Недостатке устройства является недостаточно широкие эксплуатационные возмЬжности. Цель изобретения - расширение эксплуатационных возможностей за счет обес йечения захвата грузов различных типоразмерсе. Указанная цель достигается тем, что распорный элемент содержит две планки, концы которых связаны общим шарниром между собой и со штангой, и винтсжую стяжку, шарнирно соединенную с другими концами планок. На фиг. 1 изображено пред г1агаемое устройство, общий видj на фиг. 2 - сече ние А-А на фиг. на фиг. 3 - узел J на фиг. 1. Захватное устройство для грузов содержит корпус 1, на-которсм устанселены горизонтальные направляющие 2. Внутри корпуса установлена подвижно штанга 3 с распорным элемент)м, содержащим две планки 4, одни концы которых связаны общим шарниром 5 между собой и с.о штангой, и винтовую стяжку 6, соединенную с другими концами ппанок посредством шарнирных осей 7. Штанга 3 имеет петлю 8 поц крюк подъемного механизма. В горизонталь- ных направляющих 2 установлены захватные Г-образные органы 9, вертикальная полка каждого из которых имеет выступы 10, эходящие в отверстия или пазы поднимаемого полого груза 11,, а горизонтальная полка - упорные роли-
ки 12, взаимодействующие с планками 4 распорного элемента. Дття соединения штанги 3 с корпусом 1 ипи для разъединения их друг с другом служит установленный внутри корпуса механизм 13 фиксации, содержащий шарнирно установленную на оси 14 -корпуса ,звездочку 15, с которой вэйимодействует выступ 16 на внутренней поверхности штанги . На корпусе 1 устансюлены также вертикальные направляющие 17 с ограничителями 18, и наштанге -3 - упорная горизонтальная пластина 19 с отверстиями, сквозь которые пропуш.ены направляю-1 шие 17.
На горизонтальных направляющих 2 корпуса закреплены опоры 20 и ловители в виде вертикальных рычагов 21, способствующие лучией фиксации всего устройства нагрузе 11.
На каждой из т-оризонтальных полок Г-образных органе 9 установлено натяжное устройство, содержащее винтовую пару 22, с винтом которой соединена гибкая тяга 23, запассванная через устанселенный на той же полке направляющий ролик 24. Сьободные концы тяги закреплены на планках 4.
Устройство работает следующим образом.
При опускании1 устройства опоры 20 корпуса 1 опираются на груз J 1, штанга 3 опускается вниз до крайнего нижнего положения, при этом звездочка 15 механизма 13 фиксации разъединяет корпус и штангу относительно друг друга.
При движении петли 8 и штанги 3 вверх осуществляется захват изделия таким образом. Раздвижные планки 4 поднимаются вверх, воздействуют на упорные ролики 12 захватных органов 9, которые перемещаются горизонтально в направл5пощих 2. По мере подъема штан-- ги 3 и планок 4 выступы 1О входят в окна пoднимaйv oгo груза 11. Бели необходимо поднять груз другого размера.
планки 4 сдвигают или раздвигают от носнтельно шарнира 5 винтсжой стя:-,.;кой 6.
бертикальные направл5пощие 17с ограничителями 18 и упорной пластиной
19 необходимы для подъема грузов, не выдерживающих разрывных усилий распора, т.е. в этом случае пластина упирается в ограничители в тот Момент, когда
выступы 10 входят в окна груза 11 с образованием небольшого зазора между вертикальной стенкой паза и вертикаль- ной стенкой вкступа 10. Этот зазор регулируется в основном перемещением огра5 ничителей 18 вдоль направляющих 17., Однако его можно регулирс ать и разведением планок 4 посредством винтовой стяжки 6.
Предлагаемое устройство используется
0 для подъема изделий с различными размерами, колеблющимся;; от 100 до 250 мм, т.е. увеличиваются эксплуатационные воз- можности.
Формула изобретения
Захватное устройство для грузов, содержащее корпус с горизонтальными направляющими, в котором устансжлена под-вижно штанга с распорным элементом, взаимодействующим с захватными органами, установленными с возможностью перемацения в горизонтальных направляющих, и механизм фиксации положения .захватных органов, отличающееся тем, что, с целью расширения эксплуатационных возможностей, распорный элемент содержит две планки, одни концы которых связаны общим шарниром между собой и со штангой, и винтс ую стяжку, шарнирно соединенную с другими концами планок.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР NO 379513, кл. В 66 С 1/66 , 197О (прототип).
/т
. IB
If -3
15
