Изобретение относится к измерительной технике и может быть спользовано в устройствах для измерения временных интервалов в радиолокационной и радионавигационной технике а также в импульсно-фазовых н фазовых ра ноетнодальномерных радионавигационных системах. о Из вестно устройство для измерения временных интервалов, содержащее приемник, блоки точного и грубого отсчета, которое имеет низкую надежность устранения многозначности 11, Наиболее близким к предлагаемому является устройство для измерения временных интервалов, содержащее приемник, блок точного отсчета, блок грубого отсчета, блок вычитания, вычислитель поправки, сглаживающий фильтр, индикатор, блок устранения :многозначности 2. Однако в данном устройстве возможна вероятность неправильного устранения многозначностн за счет наличия шумов в блоках точного и гру бого отсчетов, что приводит в итоге к ухудшению точности измерения временных интервалов. Цель изобретения - повышение точности измерения временных интервалов . Поставленная цель достигается тем, что в устройстве для измерения временных интервалов, содержадем индикатор и последовательно соединенные приемник, блок точного отсчета, -вычислитель поправки, сглаживающий фильтр, выход koTOpora подключен к первому входу блока вычитания, второй вход которого соединен с выходом блока грубого отсчёта, а выход блока вычитания подключен ко второму входу вычислителя поправки, индикатор подключен к выходу блока вычитания, а блок грубого отсчета содержит датчик курса, датчик скорости, вычислитель координат и преобразователь координат, причем выходы каждого из указанных датчиков подключены соответственно к первому и второ чг входам вычислителя координат, выхсщ вычислителя координат подключен ко входу преобразователя координат, выход которого является выходом блока грубого отсчета. На чертеже представлена функциональная схема предлагаемого устройстдадля измерения временных интервалов .,
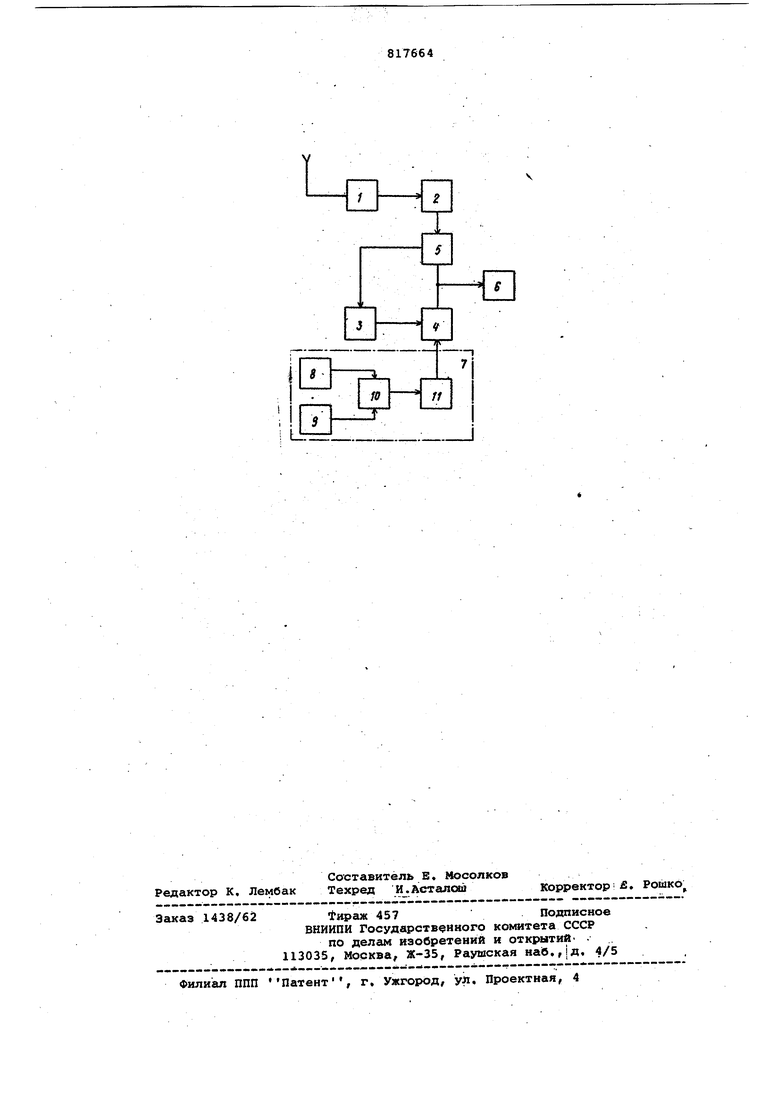
Уст1 йство содержит приемник 1, блок 2 точного отсчета, сглаживающий фильтр 3, блок 4 вычитания, вычислитель 5 поправки, индикатор 6, блок 7 грубого отсчета, который состоит из датчика 8 курса, датчика 9 скорости, вычислителя 10 координат, преобразб вателя 11 координат.
Устройство работает следующим образом.
С выхода приемника 1 радиоимпуль поступают на вход блока 2 точного отсчета, где измеряется разность фаз tp высокочастотных заполнений принятых радиоимпульсов ведущей и ведомой станций (точный отсчет), которая передается в вычислитель 5 поправки. На выходе блока 7 грубого отсчета по данным автономной системы определяется значение грубого временного интервала между импульсабш веяомой и ведущей станций радионавигационной системы (напри мер, Лоран-С) в точке приема, т.е. гиперболическая координата точки приема. Это значение подается в блок 4 вычитания. Блок 4 вычитания совместно с вычислителем 5 поправки и сглаживающим фильтром 3 образуют следящую; систему,которая предназначена для вычисления оценки медленно меняннцейся составляющей разности ошибок грубого и точного отсчетов и для вычитания ее из грубого отсчета.
Полоса пропускания предлагаеглой следящей систегла выбирается таким образом, чтобы следящая система не только сглаживала &J шумовую составляющую, но и отслеживала бы все медленные изменения ошибки.
Блок 7 грубого отсчета обеспечивает определение координат объема автономными навигационными средствами. В блоке 7 в качестве датчика Ь курса может использоваться гироскопический датчик, именмдий наилучшие технические характеристики среди вс других современных датчиков угловых перемещений и потому наиболее широк используемый в современных автономных навигационных системах, в качестве датчика 9 скорости могут использоваться любые датчики линейных перемещений или их производных, например, широко используемый в современных навигационных.системах допплеровский измеритель скорости. Вычислитель 10 координат обеспечивает расчет -местоположения объекта по заданной начальной точке движени объекта и текущим данным указанных датчиков 8 и 9. в требуемой системе
координат (например географических, прямоугольных, ортодромических координатах), преобразователь 11 координат преобразует указанные виды координат в гиперболические координаты с учетом местоположения станций радионавигационной системы, т.е. на выходе преобразователя 11 формируется оценка измеряемого временного интервала tf-p, полученная по данным автономной навигационной системы.
В блоке 4 вычитания данные грубого отсчета корректируются, причем полученный результат является одновременно и результатом измерения временного интервала,
В предлагаемом устройстве по сравнению с известными повышается точность измерения временных интервалов, так как в -блоке 3-грубого отсчета отсутствует флуктуационная составляющая в ошибкеAt p грубого отсчета. Кроме того, обеспечивается фильтрация флуктуационной составляющей сшибки блока 2 точного отсчета за счет сглаживающих свойств следящей системы.
Формула изобретения
Устройство для измерения временных интервалов, содержащее индикато а также последовательно соединенные приемник, блок точного отсчета, вычислитель поправки, сглаживающий фильтр, выход которого подключен к первому входу блока вычитания, второй вход которого соединен с выходом блока грубого отсчета, а выход блока вычитания . подключен ко второму входу вычислителя поправки, отличающееся тем, что, с целью повышения точности измерения временных интервалов, индикатор подключен к выходу блока вычитания, а блок грубого отсчета содержит датчик курса, датчик скорости, вычислитель координат и преобразователь координат, причем выходы каждого из указанных датчиков подключены соответственно к первому и второму входам вычислителя координат, выход вычислителя координат подключен ко входу преобразователя координат, выход .которого является
выходом блока грубого отсчета.
Источники информации; принятые во внимание при экспертизе
1,Лутченко А.Е, Когерентный прием радионавигационных сигналов, М., Соврадио, 1973,
2,Авторское свидетельство СССР
530313, кл, G 04 F 10/06,30,09,76
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временных интервалов | 1981 |
|
SU983645A2 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |
| Устройство для измерения временных интервалов | 1975 |
|
SU530313A1 |
| ПРИЕМОКООРДИНАТОР | 1990 |
|
RU2065612C1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ | 1999 |
|
RU2153683C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| Устройство автоматического управления курсом судна | 1989 |
|
SU1716485A1 |
| ЦИФРОВОЙ ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2011 |
|
RU2467351C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |