Изобретение относится к цифровым системам программного управления и может быть использовано в позиционном электроприводе, например, в ро- бототехнических комплексах.
Цель изобретения - расширение функциональных возможностей системы управления электроприводом за счет адаптации к моменту нагрузки.
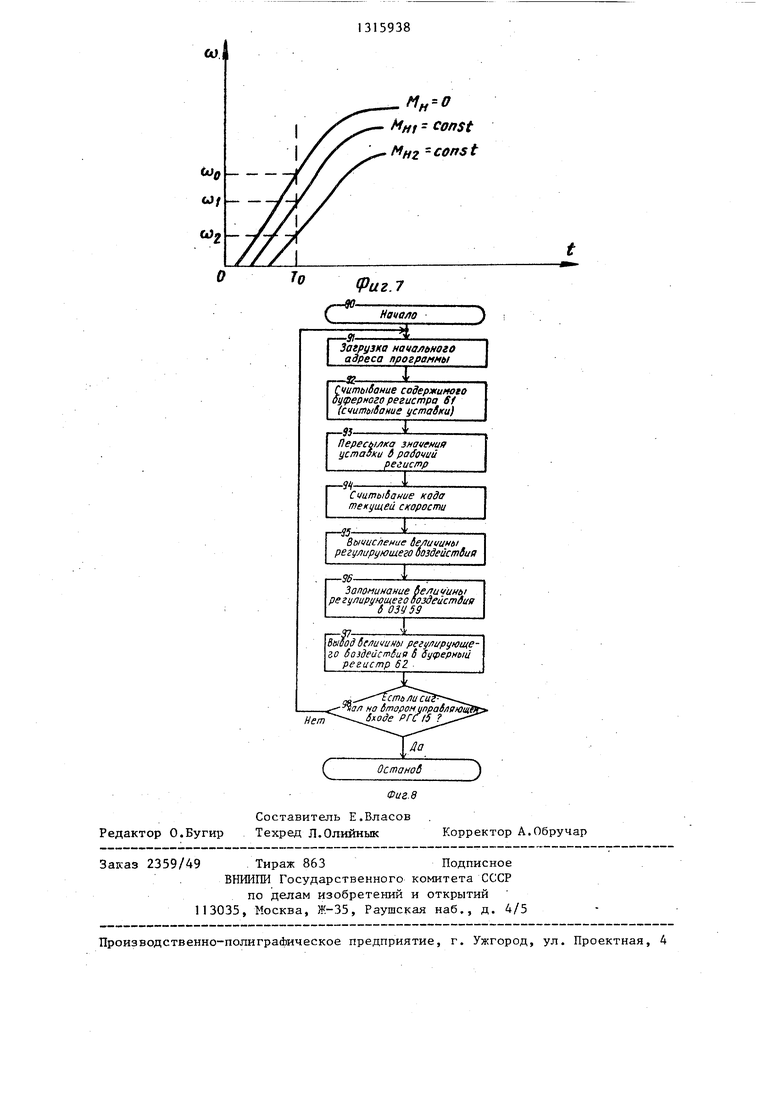
На фиг.1 представлена функцио- нальная схема адаптивной цифровой системы управления электроприводом; на фиг.2 - функциональная схема формирователя адреса; на фиг.З - функциональная схема синхронизатора; на фиг.4 - функциональная схема блока управления системой; на фиг.5 - функциональная схема регулятора скорости на фиг.6 - функциональная схема блока управления; на фиг.7 - разгонные характеристики двигателя при различных; моментах нагрузки; на фиг.8 - структурная схема алгоритма работы микропроцессорной системы.
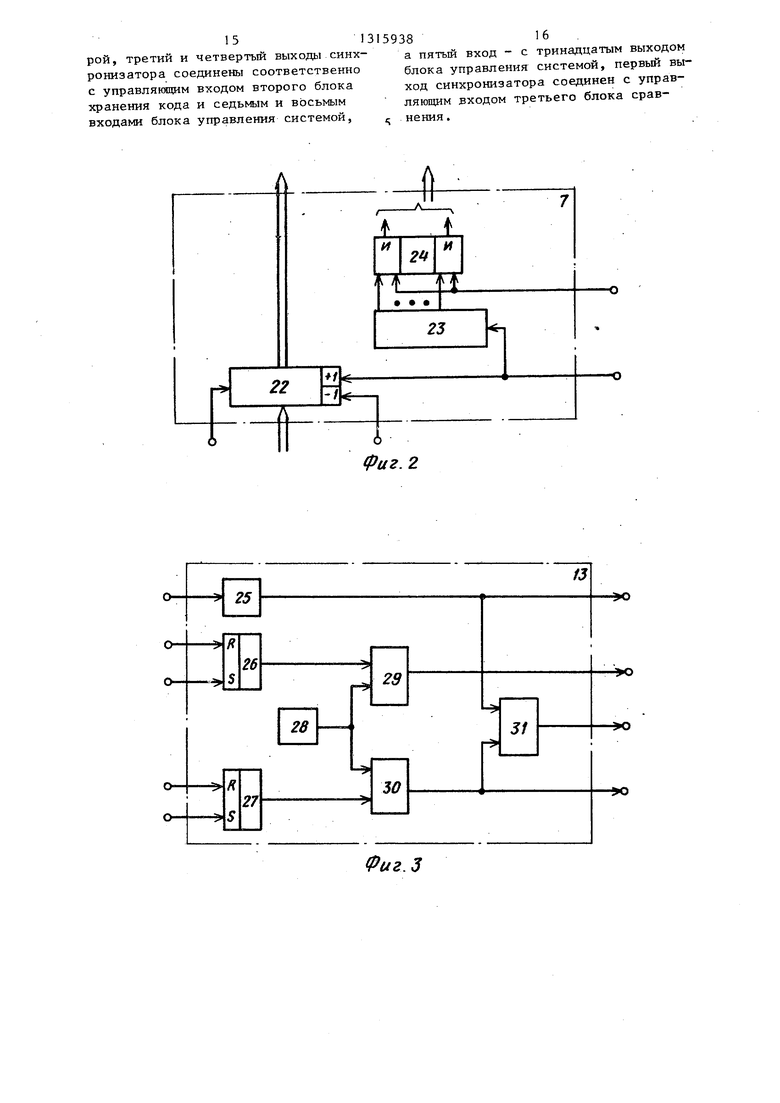
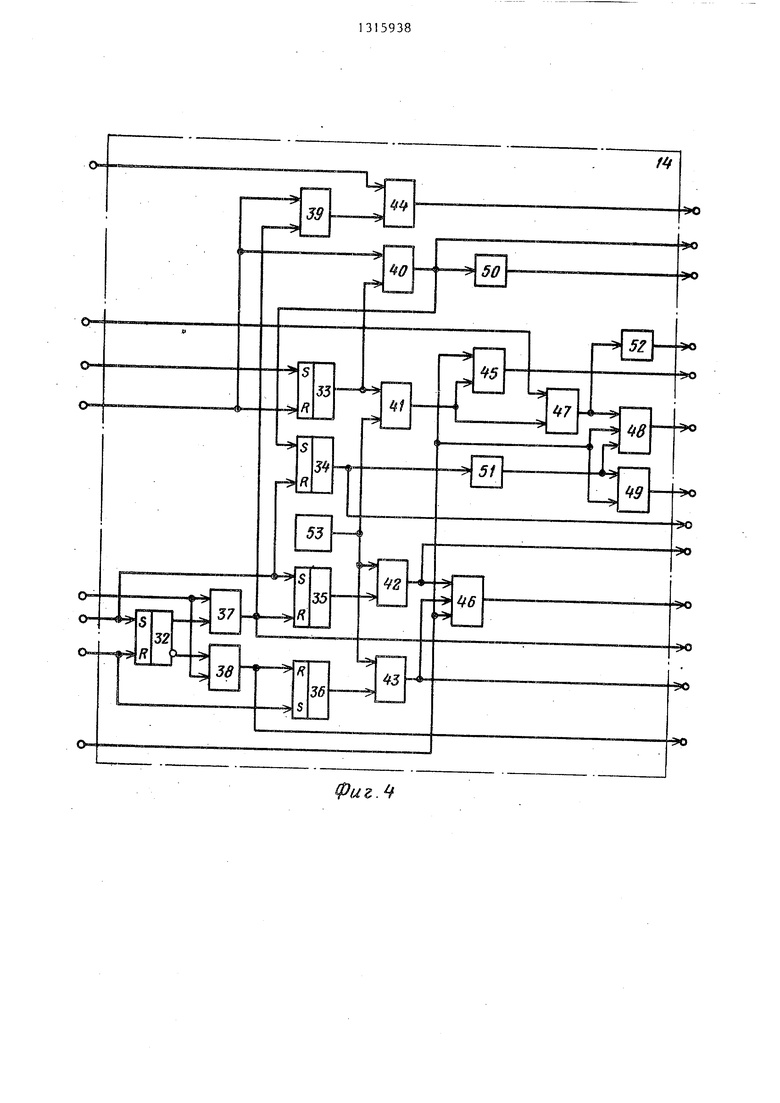
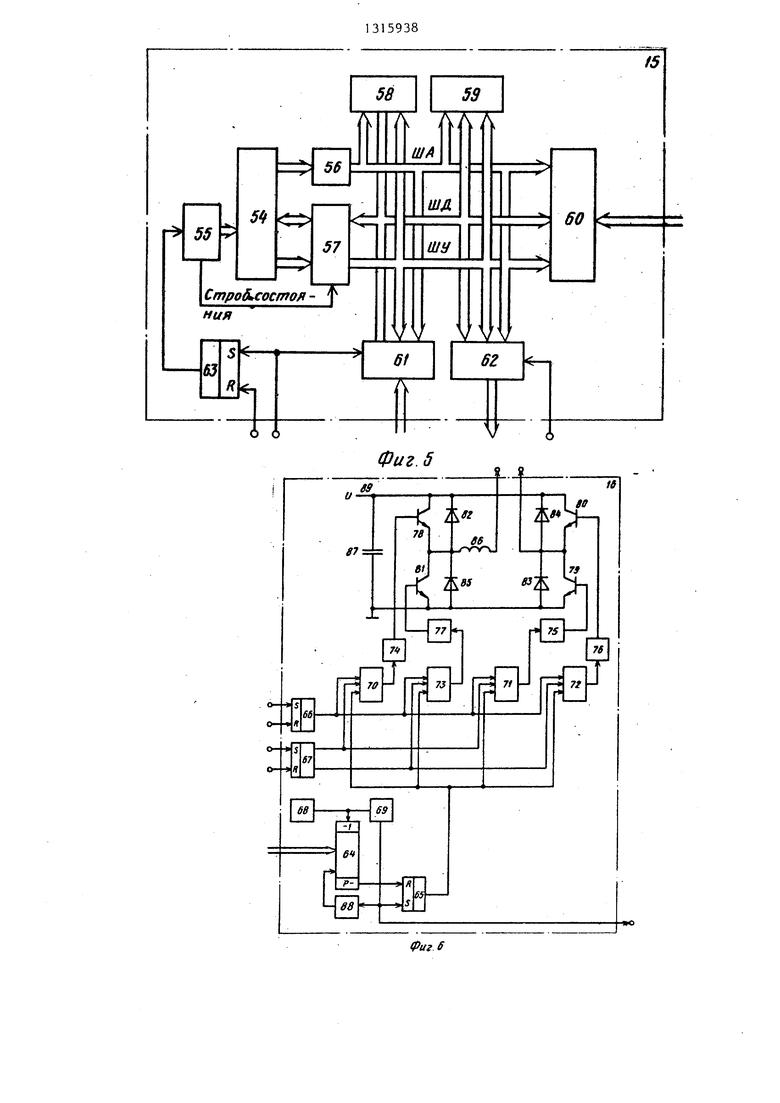
Система содержит блоки 1 - 3 хране- ния кода, блоки сравнения 4-6, формирователь 7 адреса, счетчики 8 и 9 импульсов, блоки 10 - 2 памяти, синхронизатор 13, блок 14 управления системой (БУС), регулятор 15 скорое- ти, блок 16 управления, датчик 17 положеюш, датчик 18 скорости, ио,- полнительньш механизм 19, содержащий двигатель 20 постоянного тока и редуктор 21. Формирователь 7 адреса (фиг.2) содержит реверсивный счетчик 22 импульсов, счетчик 23 импульсов, группу элементов И 24„ Синхронизатор 13 (фиг.З) содержит элемент 25 задержки, триггеры 26 и 27, генератор 28 импульсов, элементы И 29 и 30, элемент ИЛИ 31. Бло К 14 управления системой (фиг.4) содержит триггеры 32 - 36, элементы И 37 - 43, элементы -ИЛИ 44 - 49, формировате- ли 50 - 52, генератор 53 импульсов. Регулятор 15 скорости (фиг.5) содержит микропроцессор 54 (КР580ИК80), генератор 55 тактовых импульсов (КР580ГФ24), буфер 56 адреса (на мик росхемах K58liP12)5 системный контроллер 57 (КР580ВК28), программируемое постоянное запоминающее устройство {ППЗУ) 58 (на микросхемах К573РФ1), оперативное запоминающее устройство (ОЗУ) 59 (на микросхемах К56РУ2), па раплельньш программируемый интерфейс 60 (КР580ИК55), многорежимные буферные, регистры 61 и 62, триггер 63
Блок 16 управления (фиг.6) содержит реверсивный счетчик 64 импульсов, триггеры 65 - 67, генератор 68 импульсов (ГИ), делитель 69 частоты, элементы И 70 - 73, усилители 74 - 77, силовые транзисторы 78-81, диоды 82 - 855 дроссель 86, конденсатор 87, формирователь 88 импульсов, nmiry 89 питающего напряжения.
Блоки - 3 хранения кода выполнены, например, на микросхемах К155ТМ8, блоки 4-6 сравнения - на микросхемах К555СП1. Счетчики 22, 23 и 64 вьшолнены с использованием микросхем К155ИЕ7.
В качестве блоков 10 - 12 памяти используются ППЗУ типа К573РФ1. Эти блоки памяти предварительно программируются следуюпщм образом. В блоке 10 памяти хранятся значения скоростей вращения двигателя, причем по первому адресу, определяемому только младшими разрядами блока 22 формирователя адреса 7, записан код макси- мальной скорости на холостом ходу двигателя. С второго по (1с+1)-й адрес записано k значе1шй скоростей. двигателя, которые он должен достичь при различных моментах нагрузки по истечении времетш TO, определяемого синхронизатором., после начала движения. При этом второму адресу соответствует код скорости при моменте нагрузки HH О по истечении времеш TO с начала движешш, а (k+l)-My адресу - код скорости при k-M моменте нагрузки. По адресам, сформированным первыми адресными входами (младшие разряды) и третьим адресным входом (один старший разряд) блока 0 памяти, записаны значения максимальных скоростей, соответствующих различным моментам нагрузки. По адресам, сое- тавленным из первых адресных входов (младшие разряды) и вторых адресных входов (старшие разряды), записаны значения скоростей, по достижении которых необходимо выключить двигатель, чтобы достичь заданного положения без перерегулирования в случае треугольного закона отработки заданного перемещения.
Для значения момента нагрузки предварительно снимается разгонная и тормозная характеристики, из которых определяются код разгона КР .(величина пути, пройде нная исполнительным механизмом по достижении двигателем максимальной скорости),
313
код торможения КТ (величина пути, пройденная исполнительным механизмом с момента выключения двигателя до его полной остановки), а также код разгона и торможения КРТ как сумма КР + КТ. Для каяодой разности (КРТ- -КЗП), причем , где КЗП - код заданного перемещения, соответствует свое значе1ше скорости, при которой выключается двигатель. Количество значений этих скоростей выбирается исходя из заданной то чности позиционирова1гая и реально используемых в данной системе заданных перемещений. Младшие разряды адреса блока 10 памяти определяются исходя из разности (КРТ-КЗП), а старшие характеризуют момент нагрузки.
-В блоках 11 и 12 памяти с второго по (k+)-й адрес записано k значений КТ (блок 1 1) и КРТ (блок 1 2) для различных моментов нагрузки двигателя, причем по второму адресу записаны соответствующие коды на холостом ходу (Мц 0).
Система работает следуюш м образо Перед началом работы счетчики 22 и 23 импульсов формирователя 7 адреса, счетчики 8 и 9 импульсов, счет- ник 64 блока управления системой, а также блоки 1 - 3 хранения кодов обнуляются сигналом Сброс (не показан . Этим же сигналом триггеры 26 и 27 синхронизатора 13, триггеры -32 - 36 блока 14 управления системой, триггер 63 регулятора 15 скорости, а также триггеры 65 - 67 блока 16 управления устанавливаются в ноль.
На входы системы поступают следующие сигналы: на первый вход (информационные входы первого блока 1 хранения кода)- КЗП; на второй вход (вход записи первого блока 1 хранения кода) - сигнал на третий и четвертый входы системы - комбинация уровней логического О и 1, причем, если на третий вход системы подан уровень логической 1, а на четвертый вход системы - уровень логического О, то это соответствует заданию левого вращения двигателя 20 .при обратной комбинации задается правое вращение двигателя. По переднему фронту сигнала Пуск КЗП записывается в блок 1 хранения кода. По заднему фронту сигнала Пуск информация (обратный -код КЗП) с инверсных выходов первого блока 1 хранения записывается в первый счетчик 8 им8 4
пульсов. Этот же сигнал Пуск поступает на четвертый вход блока 14 управления системой и через зле- мент ИЛИ 46 на первый выход, а затем на счетный вход первого счетчика 8 импульсов. Таким образом, в счетчике 8 записывается дополнительный код заданного перемещения. Кроме того, сигнал поступает через элемент ИЛИ 45 на (третий выход) БУС 14 и с него на первый счетный вход (+.1) формирователя 7 адреса, записывая в счетчики 22 и 23 логическую 1 и устанавливая на первых информационных выходах соответствующий адрес. Одновременно сигнал Пуск, проходя через элемент ИЛИ 48, поступает на седьмой выход БУС, затем на вход считывания блока 10 памяти, и, проходя через элемент ИЛИ 49, на восьмой выход БУС, а далее - на первьм управляющий вход регулятора 15 скорости. Соотношение времен задержек С, , , . ь з элементов ИЛИ 45, 48
и 49 таково, что ,-i t,; ёГ. При появлении сигнала на входе считывания первого блока 10 памяти на его выходах появляется код максимальной ско- рости на холостом ходу двигателя,
который хранится по первому адресу и поступает на первые информационные входы регулятора 15 скорости по сигналу записи с восьмого выхода БУС 14. Этим же сигналом триггер 63 перево- .,
дится в единичное состояние, устанавливая генератор 55 тактовых импульсов и микропроцессор 54 в состоя-. ние Готов.
Работа микропроцессорной системы
по структурной схеме алгоритма
(фиг.8) осуществляется следующим образом. При поступлении на вход адаптивной системы сигнала Пуск последний воздействует на БУС 14, на вось-
мом выходе которого появляется сигнал, устанавливающий генератор 55 тактовых импульсов и микропроцессор 54 (фиг.5) в состояние Готов, что соответствует блоку 90 Начало
на структурной схеме алгоритма
(фиг.8). Микропроцессор 54 начинает выполнение программы, записанной в ППЗУ 58 (блок Загрузка начального адреса программы). На адресных выходах микропроцессора 54 и выходах буфера 56 адреса появляется адрес команды - считывание содержимого буферного регистра 61 по шине данных через системный контроллер 57 в мик513
ропроцессор 54, т.е.-в аккумулятор поступает уйтавка, соответствуклцая максимальному значению скорости двигателя на холостом ходу (блок 92 структурной схемы алгоритма, фиг,8. Эта уставка пересьшается в один из рабочих регистров микропроцессора, и по следующей команде производится считывание кода текущей скорости (блоки 93 и 94 структурной схемы алгоритма, фиг.8). Для этого опраши-. вается датчик 18 скорости (фиг.1), выходной код которого поступает на вторые информационные входы регулятора 5 скорости и через параллельный программируемый интерфейс 60 проходит по шине данных в микропроцессор 54 (фиг.5). Следующая группа команд (блок 95 структурной схемы алгоритма, фиг.8) осуществляет вычисление величины регулирующего воздействия по одному из законов регулирования, например, по ПИ-закону, который реализуется по формуле
U(k)U(k-l)+g,e(k)+g;e(k-l),,
где U{k),U(k-l) - управляющее воздействие на k-M и (k-)-M тактах квантования переходного процессаJ
e(k),e(k-l) - сигнал ошибки (-разность мещ1;у величиной уставки и теку- ищм значением датчика скорости) на k-M и (k-l)-M тактах квантования; . . Sp S; коэффициенты настройки регулятора Промежуточные результаты вычисления хранятся в ОЗУ 59 (фиг.5). Результат выисления, величина регулирующего воздействия, записывается в одну из ячеек 59 (блок 96 структурной схемы алгоритма, фиг.8), а также в буферный регистр 62 (блок 97, фиг.8), после чего цикл выполнения программы повторяется (блок 91, фиг.8), пока на второй управляющий вход блока 15 не поступит сигнал, сбрасывающий единичный уровень на входах микропроцессора 54 и генератора 55 (блок 98, фиг.8). Управление всеми внешними устройствам, ППЗУ 58, ОЗУ 59 осуществляется по шине управления от системного контроллера 57. При смене уставки, поступающей на первый информационный вход блока 15
8 6
от блока 10 памяти, регулирование осуществляется по тому же алгоритму. Микропроцессор 54 начинает выполнение программы, записанной в Ш13У 58.
При этом на адресных выходах микропроцессора и выходах буфера 56 адреса появляется адрес первой команды - считывания содержимого буферного регистра 61 по шине данных через системный контроллер 57 в микропроцессор 54. В процессе выпопнения программы производится вычисление величины регулирующего воздействия, например, по пи-закону регулирования.
Для этого опрашивается выход датчика 8 скорости, выходной код которого поступает на вторые информационные входы регулятора скорости и через па- раллельньш программируемзш интерфейс 60 проходит по шине данных в г-щкропроцессор 54, При первом опросе датчика скорости регистрируется нулевой код. Промежуточные результаты вычислений хранятся в ОЗУ 59. Результат вычислений, величина регулирующего воздействия, записывается в буферный регистр.62, после чего цикл выполнения программы повторяется. Сигнал Пуск, воздействуя на второй
вход блока 16 управления, устанавливает триггер 66 в единичное состояние, подготавливая тем самым блок 16. к работе.
Импульсы от генератора 68 поступают на. счетный вход (-1) реверс- ного счетчика 64, а также на делитель 69 частоты, например, с коэффициентом деления 256. Каждый импульс с делителя частоты устанавливает выход триггера 65 в единичное
состояние и открывает соответствующие элементы И, причем, если задано ле- вращение двигателя.
вое вращение двигателя, т.е. на третьем управляющем входе блока 16 5 устанавливается 1, а на четвертом управляющем входе блока 16 устанав- 0
ливается
, то открыты элеменTI.I И 70 и 71 , усилители 74 и 75 и силовые транзисторы 78-и 79. При
Q правом вращении двигателя на четвертом входе блока 16 устанавливается 1 и, следовательно, открыты элементы К 72 и 73, усилители 76 и 77, транзисторы 80 и 81. На сило55 вых выходах блока 16, к которым подключена якорная обмотка двигателя 20, создается напряжение соот ветственно дня левого и правого вращения. Одновременно импульс с выхода делителя 69 частоты поступает на управляющий выход блока 16 к затем на тре тий вход регулятора 15 скорости, в результате чего информация из буферного регистра 62 появляется на информационных выходах блока 15, посту пает на информационные входы БУС и импульсом от формирователя 88, записывается в реверсивный счетчик 6А. Поступающие на счетный вход счетчика 64 импульсы уменьшают его содержимое и в момент перехода через О на выходе р- появляется сигнал переполнения, который устанавливает выход триггера 65 в О, выключая соответствующие элементы И, усилители и транзисторы.
Таким образом, длительность откры того состояния транзисторов пропорциональна коду .регулирующего воздействия , поступающего в счетчик 64 из регулятора 15 скорости, т.е. осуществляется широтно-импульсное преобразование.
Диоды 82-85 обеспечивают протекание реактивного тока, запасенного, в индуктивности обмотки якоря двигателя 20 постоянного тока и дросселя 86 при выключении соответствующих транзисторов. Конденсатор 87 снижает пульсации напряжения.
В результате поступления из первого блока 10 памяти на первые инфор мационные входы регулятора 15 кода максимальной скорости при холостом ходе в системе при поступлении сигнала Пуск на ее второй вход начинается разгон двигателя до этой скорости. Однако, если к двигателю приложен некоторый момент нагрузки М, то его разгонная характеристика (зависимость развиваемой скорости от времени при моменте нагрузки М.ц const) отличается от характеристики, снятой в режиме холостого хода (), Поэтому по истечении времени Tjj, определяемого элементом 25 задержки синхронизатора 13, с момента подачи на его третий вход сигнала Пуск производится сравнение дости- гаемого двигателем за это время значения скорости со значениями скоростей для различных моментов нагрузки, хр.анящихся в блоке 10 памяти. Дпя этого с выхода элемента 25 задержки через элемент ИЛИ 31 с второго выхода синхронизатора 13 сигнал поступает на управляющий вход блока 2 хранения кода и записывает в него теку159388
щий код скорости с датчика 18 скорости. Одновременно сигнал с четвер- того выхода блока 13 поступает на восьмой вход БУС 14, устанавливает
триггер 33 в единичное состояние, разрешая прохождение импульсов с генератора 53 через элемент И 41 на третий выход БУС 14, а также через элементы ИЛИ 47 и 48 ,на седьмой выг
10 ход БУС 14 и через формирователь 52- на десятый выход БУС 14. С третьего выхода БУС 14 сигнал поступает на первый счетный вход формирователя 7 адреса и увеличивает содержимое счет15 чиков 22 и 23 на единицу. С первых информационных выходов формирователя 7 на первые адресные входы блока 10 памяти поступает адрес (второй) , по которому сигналом с седьмого
20 выхода блока 14 считывается код скорости, которую должен достигнуть двигатель за время Т в режиме холосто- - го хода. А затем сигналом с десятого выхода БУС 14 в блоке 4 сравнения
25 сравниваются текущий код скорости.и код, считанный из блока 10 памяти. Если коды не равны, то по следующе- му импульсу от генератора 53 увеличивается адрес на единицу, из бло30 ка 10 памяти считывается новое значение скорости, соответствующее другому моменту нагрузки двигателя, и сравни вается с текущим;значением скорости, записанным в блоке 2 хра-
нения кода. Тактовая частота генератора 53 выбирается такой, чтобы
процессы выборки- и считывания из I
блока 10 памяти, а также операции сравнения для всего набора ра згонных
0 характеристик совершались за время, в течение которого информация в блоке 2 хранения кода остается неизменной. На вход блока 4 сравнения поступает m-k двоичных разрядов
45 датчика скорости, где m - разрядность датчика скорости.
k число
50
55
младших разрядов, которое определяет требуемую точность сравнения и шаг, с которым записаны дискретные значения скорости в блоке 10 памяти. В момент сравнения двух кодов на информационных выходах счетчика 23 фиксируется порядковый номер разгонной характеристики, причем первому номе- ру соответствует характеристика в режиме холостого хода (), а последнему - характеристика с максимально возможным для данного двига913
теля и системы в целом моментом нагрузки М (фиг.7).
При этом сигнал сравнения поступает на пятый вход БУС 14, проходит через открытый элемент И АО на двенадцатый выход БУС 14 и через формирователь 50 импульсов на одиннадцатый выход БУС 14. Сигнал с двенадцатого выхода БУС 14 поступает на входы считывания блоков 11 и 12 памяти, в которых происходит считывание информации: КТ из блока 11 и ICPT из блока 12. Эти коды соответствуют определенной ранее раз гонной характеристике. Сигнал с одиннадцатого выхода БУС 14 разрешает сравнение КЗП и КРТ в блоке 5 сравнения. Сигнал с выхода элемента И 40 устанавливает триггер 34 в единичное состояние и проходит на шестой выход БУС 14 выбирая тем самым массив значений максимальных скоростей дпя разных моментов нагрузки в блоке 10 памяти,. Кроме того, сигнал с выхода этого триггера проходит через формирователь 51 импульсов, элемент ИЛИ 48 на седьмой выход БУС 14 а через элемент РШИ 49 - на восьмой выход БУС 14 На седьмом выходе БУС 14 действует Сигнал считывания из блока 10 памяти, в соответствии с которым выбирается код максимальной скорости при определенном моменте нагрузки по адресу, младшие разряд 1 которого определяются кодом на первых информационных выходах формирователя 7 адреса, а старший разряд - единичным сигналом с. шестого выхода БУС 14. Выбранный из памяти код. максимальной скорости сигналом с восьмого выхода БУС 14 записывается в регистр 61 по первому управляющему входу регулятора 15 скорости, вследствие чего регулятор 15 и блок 16 управления продолжают разгон двигателя до максимальной скорости при определенном моменте нагрузки.
При сравнении КЗП и КРТ в блоке 5 сравнения может оказаться один из двух вариантов : КЗП КРТ, что соот- ветствует треугольному закону; КЗП КРТ5Что соответствует трапецеидальному закону изменения скорости при отработке двигателем заданного перемещения. Если , то на втором выходе блока 5 сравнения появляется сигнал, поступающий на вход записи формирователя 7 адреса. По этому сигналу КРТ для данного момента нагруз-.
810
ки из блока 12 памяти записывается в фор№х рователь 7 адреса по его информационным вводам. Кроме того, сигнал сравнения поступает на третий
вход БУС 14, устанавливая выходы триггеров 32 и 35 в единичное состояние, а выход триггера 34 - в нулевое состояние, причем единичный уровень на шестом выходе БУС 14 и третьем адресном входе блока 10 памяти сбрасывается. При этом эле- . мент И 42 открывается, а импульсы от генератора 53 проходят через четвертый выход БУС 14 на второй счетный вход -1) формирователя 7 адреса, а через элемент ИЛИ 46 и первый выход БУС 14 - на счетный вход первого счетчика 8 импульсов до момента его перепопнения. Сигнал (уровень) пере- полнения, поступающий на первый вход БУС 14, проходя через элемент И 37, устанавливает выход триггера 35 в нулевое состояние, запрещающее прохождение импульсов от генератора 53
на соответствующие входы счетчиков 22 и 8.
Таким образом, в счетчике 22 формирователя 7 адреса фиксируется разность кодов (КРТ-КЗП). Этой разности
соответствует значение скорости, по достижении которой следует остановить двигатель, чтобы подойти в точку заданного перемещеьгая с нулевой скоростью. Кроме того, сигнал переполнения открывает элемент И 37, проходит на пятый выход БУС 14 и устанавливает триггер 35 в нулевое сое- тояние, запрещая тем самым поступление импульсов от генератора 53 через элемент И 42 и элемент ИЛИ 46 на соответствующие входы (+1) счетчиков 22 и 8, Сигнал с пятого выхода БУС 14 поступает на управляющий вход формирователя 7-адреса и на первый
вход синхронизатора 13, В соответствии с сигналом, действующим на управляющем входе формирователя адреса 7, на,вторые информационные выходы последнего через элементы И 24 поступает код порядкового номера разгонной характеристики, который определяет в блоке 10 памяти массив значений CKopocTeii для данного момента нагрузки на двигателе, по достижегап которых двигатель должен быть выключен. Совокупность старших (вторые информационные выходы формирователя адреса 7) и младщих (первые ин- формацион 1ые выходы формирователя
n13
адреса 7) разрядов определяет адрес в блоке 10 памяти, по которому записывается значение скорости выключения двигателя при заданном перемещении. Сигнал на первом входе синхронизатора 13 устанавливает триггер 27 в единичное состояние, разрешая прохождение импульсов от генератора 28 через элемент И 30- на третий выход блока 13 и через элемент ИЛИ 31 на второй выход синхронизатора 13, Сигнал с третьего блока 13 воздействует на седьмой вход БУС 14,и, .проходя через элементы ОТИ 47 и 48, поступает на седьмой выход БУС 14, а через формирователь 52 импульсов - на десятый выход БУС 14. По сигналу с седьмого выхода БУС 14 производится считывание из блока 10 памяти значения скорости, по достижении которой следует выключить двигатель, а сигналом с десятого выхода БУС 14 это значение .сравнивается в блоке 4 сравнения с текутцим значением скорости двигателя поступающим от датчика 18 скорости в блок 2 хранения кода по сигналу, с второго выхода синхронизатора 13. Сигнал сравнения поступает на пятый вход БУС 14, открывает элемент И 39 и проходит через элемент ИЛИ 44 на девятый выход БУС 14, а оттуда - на второй управляющий вход регулятора 1 скорости, на второй управляющий вход блока 16 управления и на второй вход синхронизатора 13.
При этом триггер 27 устанавливается в нулевое состояние, запрещая прохождение импульсов от генератора 28 на второй выход синхронизатора 13. Этот же сигнал на втором управляющем входе регулятора 15 скорости переводит триггер 63 в нулевое состояние, сбрасывая сигнал Готов на входах микропроцессора 54 и генератора 55. По сигналу на первом управляющем входе блока 16 управления триггер 66 устанавливается в нулевое состояние, закрывая элементы И 70 - 73 и тем самым отключая якорную обмотку двигателя 20 от источника питания U,
Если , то на первом выходе блока 5 сравне1шя появляется сигнал, поступающий на вход записи второго счетчика 9, в соответствии с которым из блока 11 памяти в счетчик 9 записывается КТ для определенного момента нагрузки двигателя. Одновременно сигнал сравнения поступает на второй вход БУС 14, устанавли812
вая инверсный выход триггера 32, а также выход триггера 36 в единичное состояние. При этом от генератора 53 через открытый элемент И 43 начинают
следовать импульсы на второй выход БУС 14 и через элемент ИЛИ 46 на первый выход БУС 14. Импульсы с этих выходов поступают соответственно на счетный- вход -1 счетчика 9 и на
счетньп вход +1 счетчика 8 до мо- |Мента перёполнегшя последнего. Сигнал (уровень) переполнения, поступающий на первый вход БУС 14, проходя через элемент И 38, устанавливает триггер 36 в нулевое состояние, запрещающее прохождение импульсов от генератора 53 на входы счетчиков 8 и 9. Таким образом, в счетчике 9 фиксируется разность кодов (КТ-КЗП).
Эта разность определяет путь, который должен пройти исполнительньш механизм до выключения двигателя. Одновременно сигнал с выхода элемента И 38 через тринадцатый выход БУС 14
воздействует на пятый вход синхронизатора 13, устанавливая триггер 26 в единичное состояние и разрешая тем самым прохождение импульсов от генератора 28 через элемент И 29 на первый выход синхронизатора 13. Импульсы своим передним фронтом записывают текущее значение положения исполнительного механизма 19 от датчика 17 положения в блок 3 хранения кода, а
задним фронтом разрешают сравнение в третьем блоке 6 сравнения кода текущего положения и кода разности (КТ-КЗП), поступающего с информационных выходов счетчика 9. В момент
сравнения на выходе блока 6 сравнения появляется сигнал, поступающий на четвертый вход синхронизатора 13 и на шестой вход БУС 14. Сигнал, действующий на четвертом входе сйнхронизатора 13, устанавливает триггер 26 в нулевое состояние, запрещающее прохождение импульсов от генератора 28 через элемент И 29 на первьй выход блока 13. Сигнал на шестом входе БУС 14,проходя через элемент ИЛИ 44 и девятьп выход БУС 14, останавливает работу регулятора 15 скорости и блока 16 управления, выключая тем самьм двигатель 20, который
до этого момента вращается с постоянной скоростью, равной максимальной скорости при данном моменте нагрузки.
13I
Формула изобретения
Адаптивная цифровая система управления электроприводом, содержащая первый, второй и третий блоки хранения кода, первьш, второй и третий блоки сравнения, формирователь адреса, синхронизатор, блок памяти и последовательно соединенные регулятор скорости, блок управления5 исполнительный .механизм, и датчик положения, информадионнь е выходы которого через третий блок хранения кода соединены с первыми информационными входами третьего блока сравнения, причем первые информационные выходы первого блока хранения кода соединены с первыми информацио1П1ЫНИ входами второго блока сравнения, информационные входы первого блока хранения кода сое- .динены с первым входом системы, ira- формадионные выходы второго блока хранения кода соединены с первыми информационными входами первого блока сравнения, управляющий вход третьего блока хранения кода соединен с первым выходом синхронизатора, первые информационные виходь формирователя адреса соединены с адресными Входами блока памяти, отличающаяся тем, что, с целью расширения функциональных возможностей системы, в нее введены первый и второй счетчики импульсов, второй и третий блоки памяти, блок управления системой и датчик скорости, механи- чесют связанный с вторым выходом исполнительного механизма, причем информационные ВХОД, первого счетчика импульсов соединены с инверсными информационными выходами первого бло- .ка хранения кода, счетный вход и выход сигнала переполнения первого счетчика соединены соответственно с первыми выходом и входом блока управления системой, информационные входы второго счетчика подключены к выходам второго блока памяти, информационные выходы - к вторым информационным входам третьего блока сравнения , счетньш вход - к второму выходу блока управления системой, а вход записи - к первому выходу второго блока сравнешш и к второму входу блока управления системой, первые адресные входы первого блока памяти подключены к адресным входам второго и третьего блока памяти, информационные выходы которого соедине3814
ны с вторыми информационными входами второго блока сравнения и с информационными входами формирователя адреса, первьп и второй счетные входы которого подключены соответственно к третьему и четвертому выходам блока управления системой, управляю- пдай вход фор1чирователя адреса подключен к пятому выходу блока управления
системой и к первому входу синхронизатора, вход записи - к второму выходу второго блока сравнения и к третьему входу блока управления системой, вторые информационные выходы к вторым адресным входам первого блока памяти, третий адресный вход и вход считывания которого соединены соответственно с шестым и седьмым выходами блока управления системой, а
информационшле выходы - с вторыми информационными входами первого блока сравнения и первыми информационньП ТИ |Входами регулятора скорости, вторые информационгше входы которого соедипены с информационными входами второго блока хранения кода и с информационными выходами датчика скорости, первый управляющий вход регулятора скорости подключен к восьмому выходу
блока управления системой, второй управляющий вход соединен с первым управляющим входом блока управления, с вторым входом синхрогазатора и с девятым выходом блока управления системой, третий управляющий вход регулятора скорости подключен к управляющему выходу блока управления, второй управляюЕ1ий вход которого соединен с третьим входом синхронизатора,
с четвертым входом блока управления системой, с управляющими входами первого счетчика импульсов и первого блока хранения кода и с вторым входом системы, третий и четвертьш управляющие входы блока управления соединены с одноименными входами системы, уп- равляющиР вход и выход первого блока сравнения подключены соответственно к десятому выходу и пятому входу блока
управления системой, управляющий вход второго блока сравнения соединен с одиннадцатым выходом блока управления системой, выход третьего блока сравнения соединен с четвертым
входом синхронизатора и с шестым входом блока управления системой, входы считывания второго и трет ьего блоков памяти подключены к двенадцатому выходу блока управления системой, вто15
рой, третий и четвертый выходы синхронизатора соединены соответственно с управляющим входом второго блока хранения кода и седьмым и восьмым входами блока управления системой,
15938
/4J
а пятый вход - с тринадцатым выходом блока управления системой, первый выход синхронизатора соединен с управляющим входом третьего блока срав- ; нения.
fpuz.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для отображения графической информации на экране телевизионного индикатора | 1987 |
|
SU1439672A1 |
| Автоматизированная система контроля радиоэлектронных устройств | 1989 |
|
SU1683038A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1981 |
|
SU1005170A1 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| Устройство для отображения радиолокационной информации на экране электронно-лучевой трубки | 1989 |
|
SU1691880A1 |
| Измерительная система | 1981 |
|
SU997245A1 |
| Многоканальное устройство для регистрации | 1985 |
|
SU1322156A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ В АДАПТИВНЫХ ТЕЛЕМЕТРИЧЕСКИХ СИСТЕМАХ | 1995 |
|
RU2103745C1 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2713624C1 |
Изобретение относится к цифро- .вым система программного управления и может быть использовано в робото- технических комплексах. Цель изобретения - расширение функциональных возможностей системы управления электроприводом за счет адаптации к моменту нагрузки. Система содер-. жит блоки хранения кода 1,2 и 3, блоки сравнения 4, 5 и 6, формирователь адреса 7, синхронизатор 13 регулятор скорости 15, блок управления 16, датчик положения 17, исполнительный механизм 19, счетчики импульсов 8 и 9, блоки памяти 10, 1I и 12, датчик скорости 18 и блок управления системой 14. В блоках памяти хранятся значения разгонно-тормозных характеристик двигателя для различных нагрузок. Система в зависимости от момента нагрузки определяет, по какой Траектории и с какой скоростью осуществлять движение, и изменяет уставки регулятора, осуществляющего регулирование скоростью движения. 8 ил. (Л С и :л х со 30
Фиг.З
г
ША
55
5«
57
Cmpo& ocmofl - у ния
ШД
60
ШУ
63
Фиг. 5
еа
tff
78
ff
ei
79
83
i
71
76
70
J
7t
CJ/
W2
MHI Const MHZ -const
Jo
„ tcmb ли cu -, - 2(7/7 HO бторомипраблвюй, ..,e PrftS ,
/. Останоб
Редактор О.Бугир
Фиг. 8
Составитель Е.Власов Техред Л.Олийнык
Заказ 2359/49 Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
fpuz.7
Корректор А.Обручар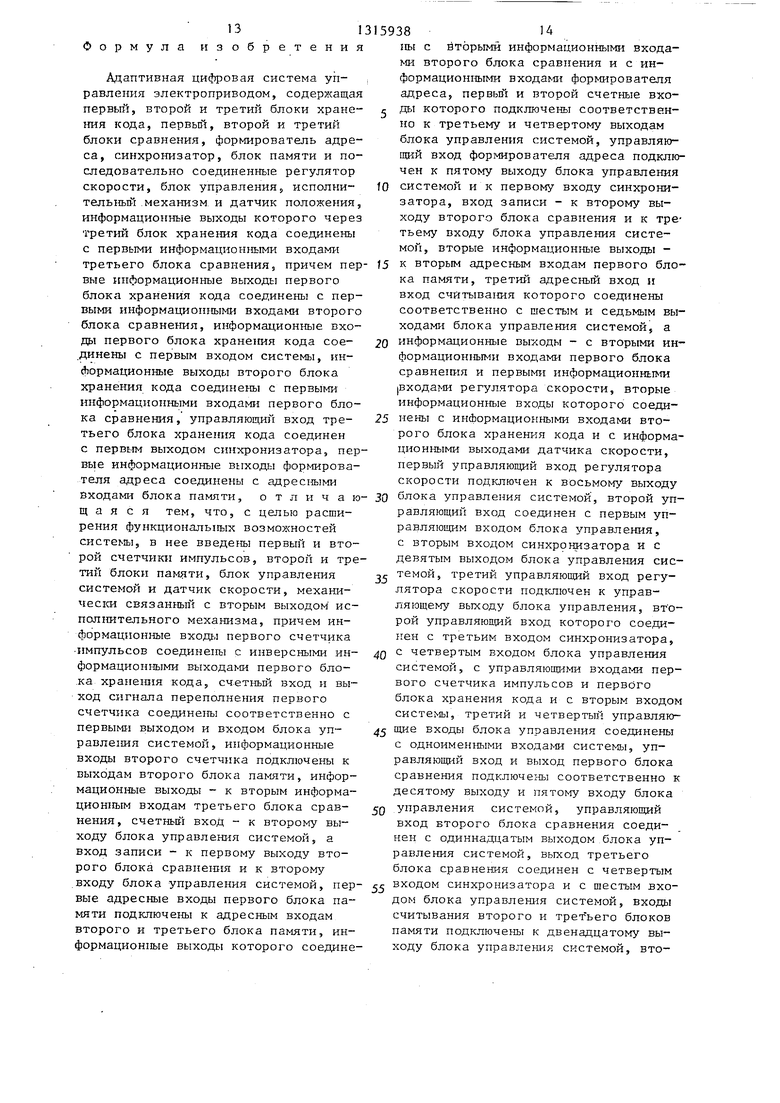
| Цифровой позиционный электропривод | 1981 |
|
SU1029366A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Цифровая позиционная система | 1981 |
|
SU974341A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
