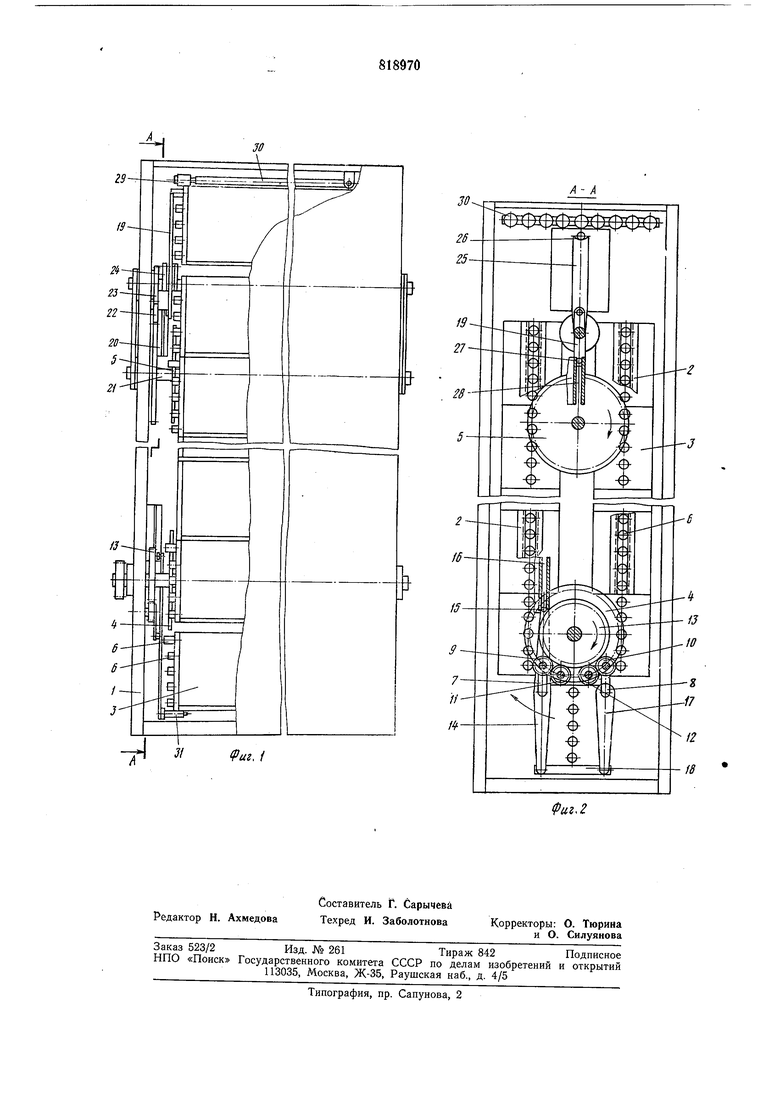
щения полок содержит шатун 19, связанный через шестерню 20, насаженную на ведомый вал 21 шестерни 5, паразитную шестерню 22, сопряженную с шестерней 23, посаженной на коленчатый вал 24. Шатун 19 имеет удлиненное плечо 25, на конце которого выполнен призматический паз 26, а нижний конец сопряжен посредством ролика 27 с направляюш,им пазом 28.
В верхней части каркаса 1 закреплен стабилизатор положения, содержаш,ий свободно повешенную качаюш,уюся раму 29 с роликами 30. Планки 18 снабжены штифтами 31.
Стеллаж работает следующим образом.
Включается привод стеллажа (не показан) и начинает вращаться, например по часовой стрелке, шестерня 4, которая захватывает своими зубьями пальцы 6 и пе-фемещает полки: один ряд полок вверх, а другой вниз. В нижней части кривошипнощатунные механизмы, приводимые в действие шестерней 4, захватывают штифтами 31 полку 3 и перемещают ее влево и вверх до захвата пальцев 6 шестерней 4.
При этом кривошипы 7 и 8 получают вращательное движение от шестерни 9 и 10, а шатуны 14 и 15 перемещаются вниз, вправо и вверх, перемещая очередную полку 3.
Каждая последующая полка в вертикальном ряду подпирает предыдущую и вся стойка перемешается вверх до захвата пальцев 6 полки 3 шестернями 5. В противоположном ряду полки 3 опускаются вниз. Вал 21 шестерни 5 получает вращение- от взаимодействия шестерни 5 с пальцами 6 полок 3 и передает крутящий момент на коленчатый вал 24 через паразитную щестерню 22 и шестерню 23. Шатуны 19 перемещаются вниз и наклоняются влево, при этом кривошипы коленчатого вала 24, пройдя нижнюю мертвую точку, продвигают шатуны 19 вверх, захватывая пазом 28 палец 6 полки 3. Шатун 19 перемещает полку 3 вверх и вправо по горизонтали и ставит на предыдущую.
Рама 29 касается полки 3, когда она идет вверх и не дает ей раскачиваться. Перемещаясь по горизонтали, полка 3 скользит по роликам 30.
Как только полка 3 встанет на предыдущую, кривошип коленчатого вала 24 уходит вниз, а призматический паз 28 освобождается от удлиненного пальца 6 полки 3. Затем полка 3 посредством пальцев 6 входит в зацепление с шестерней 5 и начинает опускаться вниз.
Далее цикл повторяется.
Формула изобретения
Стеллаж для хранения щтучных грузов, содержащий каркас с направляющими, в которых установлены грузовые полки, связанные с механизмом их перемещения, имеющим приводные и неприводные шестерни, закрепленные на каркасе, приспособление для перевода полок из одного вертикального ряда в другой, а также стабилизатор положения полок, отличающийся тем, что, с целью упрощения конструкции, механизм перемещения полок содержит ряд вертикально закрепленных на торцевых сторонах каждой полки и взаимодействующих с шестернями пальцев, один из которых выполнен удлиненным для взаимодействия с направляюшими, а приспособление для перевода полок содержит расположенные в нижней и верхней частях стеллажа с приводом от механизма перемещения полок кривошипно-шатунные механизмы, концы нижних шатунов которых соединены горизонтальными планками, а на концах верхних шатунов выполнены призматические пазы для захвата поло, причем стабилизатор положения полок выполнен в виде свободно подвешенной в верхней части стеллажа качающейся рамки с роликами.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 540775, кл. В 65G 1/04, 1973.
Риг, i
А- А
/«
| название | год | авторы | номер документа |
|---|---|---|---|
| Стеллаж для хранения штучных грузов | 1978 |
|
SU818971A1 |
| Стеллаж для хранения штучных грузов | 1983 |
|
SU1154160A1 |
| Механизированный многоярусный стеллаж | 1977 |
|
SU701872A1 |
| Механизированный стеллаж | 1982 |
|
SU1022875A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Машина для выправки щетины | 1939 |
|
SU58249A1 |
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| МЕХАНИЗИРОВАННЫЙ МНОГОЯРУСНЫЙ НАКОПИТЕЛЬ | 1990 |
|
RU2029710C1 |
| ДВУХТАКТНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2020249C1 |
| МАХОЛЕТ | 1993 |
|
RU2063367C1 |