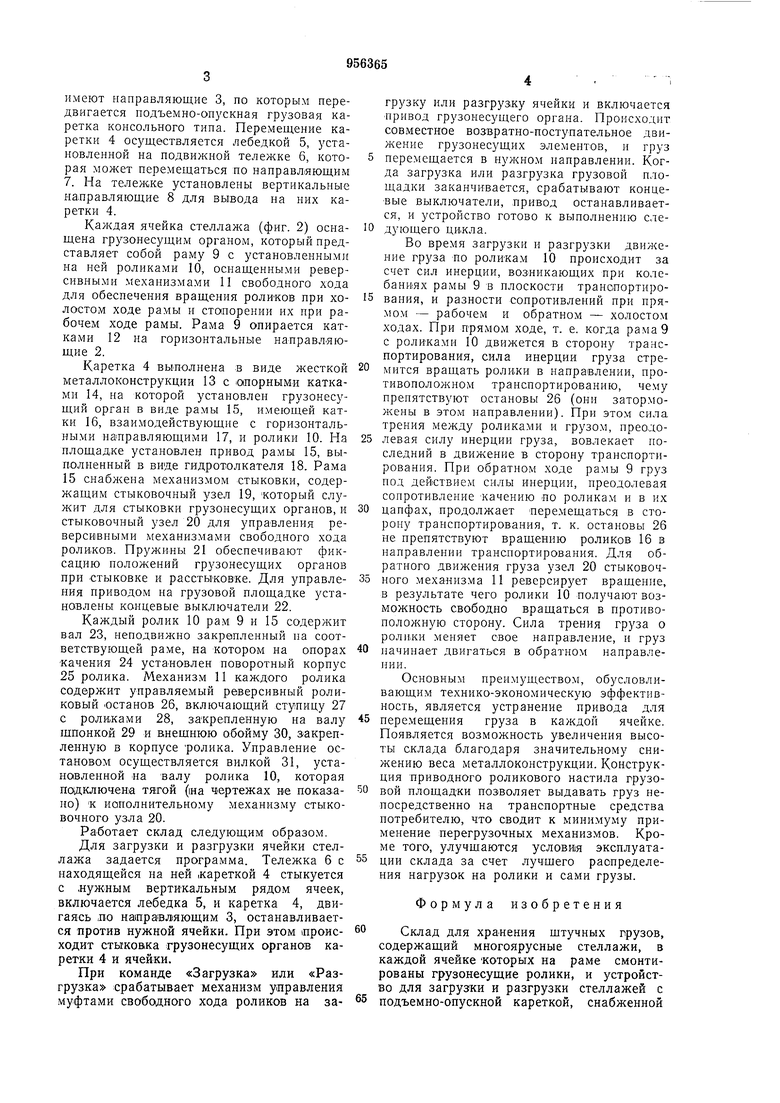
имеют направляющие 3, по которым передвигается подъемно-опускная грузовая каретка консольного типа. Перемещение каретки 4 осуществляется лебедкой 5, установлениой на подвижной тележке 6, которая может перемещаться по направляющим 7. На тележке установлены вертикальные направляющие 8 для вывода на них каретки 4.
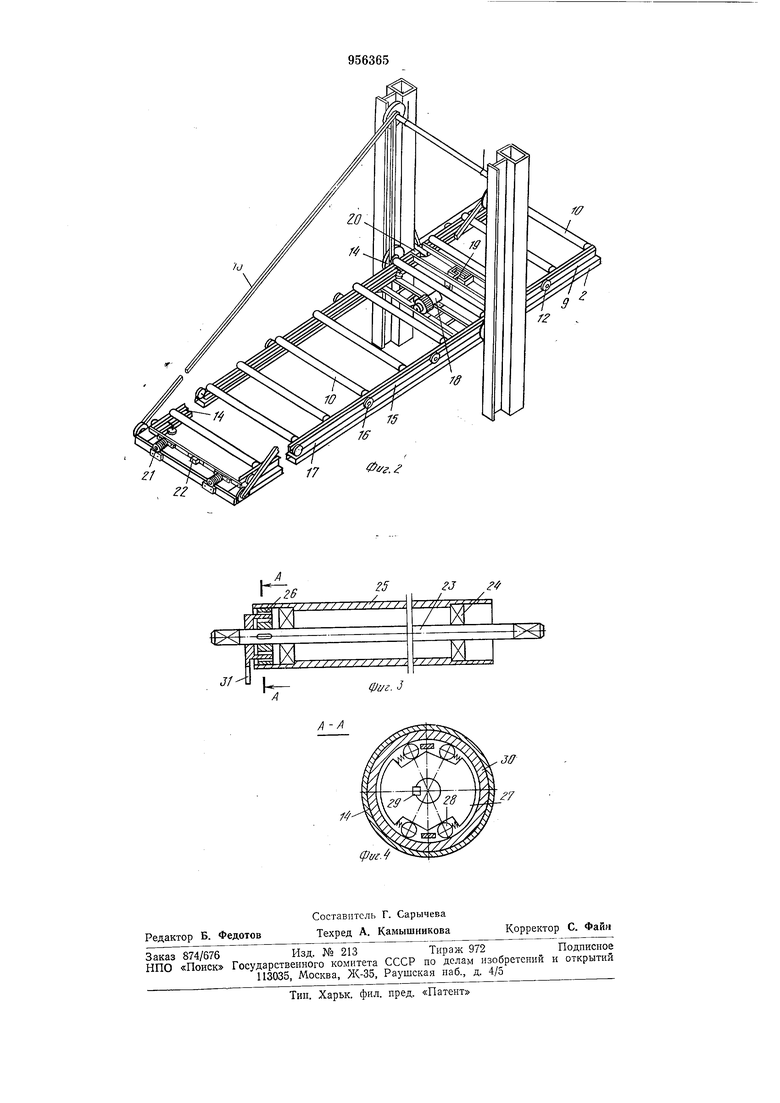
Каждая ячейка стеллажа (фнг. 2) оснащена грузонесущим органом, который представляет собой раму 9 с установленными на ней роликами 10, оснащенными реверсивными механизмами 11 свободного хода для обеспечения вращения роликов прн холостом ходе рамы и стопорении их при рабочем ходе рамы. Рама 9 опирается катками 12 на горизонтальные направляющие 2.
Каретка 4 выполнена в виде жесткой металлоконструкции 13 с lOnopHbiMH катками 14, на которой установлен грузонесущий орган в виде рамы 15, имеющей катки 16, взаимодействующие с горизонтальными направляющими 17, и ролики 10. На площадке установлен привод рамы 15, выполненный в виде гидротолкателя 18. Рама 15 снабжена механизмом стыковки, содерл ащим стыковочный узел 19, который служит для стыковки грузонесущих органов, и стыковочный узел 20 для управления реверсивными механизмами свободного хода роликов. Нружины 21 обеспечивают фиксацию положений грузонесущих органов при -стыковке и расстьгковке. Для управления приводом на грузовой площадке установлены концевые выключатели 22.
Каждый ролик 10 рам 9 и 15 содержит вал 23, неподвижно закрепленный па соответствующей раме, на котором на опорах -качения 24 установлен поворотный корпус 25 ролика. Механизм И каждого ролика содержит управляемый реверсивный роликовый останов 26, включающий ступицу 27 с ролаками 28, закрепленную на валу щпонкой 29 и внещнюю обойму 30, закрепленную в корпусе ролика. Управление остановом осуществляется вилкой 31, установленной «а валу ролика 10, которая подключена тягой (иа ЧВртежах не показ аио) К исполнительному механизму стыковочного узла 20.
Работает склад следующим образом.
Для загрузки и разгрузки ячейки стеллажа задается программа. Тележка 6 с находящейся на ней .кареткой 4 стыкуется с .нуЖНым вертикальным рядом ячеек, включается лебедка 5, и каретка 4, двигаясь ло натравляющим 3, останавливается против нужной ячейки. При этом происходит стыковка грузонесущих органов каретки 4 и ячейки.
При команде «Загрузка или «Разгрузка срабатывает механизм управления .муфтами свободного хода роликов на загрузку или разгрузку ячейки и включается привод грузонесущего органа. Происходит сов.местное возвратно-поступательное движение грузонесущих элементов, и груз перемещается в нужном направлении. Когда загрузка или разгрузка грузовой площадки заканчивается, срабатывают концевые выключатели, лривод останавливается, и зстройство готово к выполнению следующего цикла.
Во время загрузки и разгрузки движение груза по ролика.м 10 происходит за счет сил инерции, возникающих при колебаниях рамы 9 в плоскости транопортирования, и разности сопротивлений при прямом - рабочем и обратном - холостом ходах. При прямом ходе, т. е. когда рама 9 с роликами 10 движется в сторону транспортирования, сила инерции груза стремится вращать ролики в направлении, противоположном транспортированию, чему препятствуют остановы 26 (они заторможены в этом направлении). При этом сила трения между роликами и грузом, преодолевая силу инерции груза, вовлекает последний в движение в сторону транспортирования. При обратном ходе рамы 9 груз под действием силы инерции, преодолевая сопротивление качению по ролика.м и в их
цапфах, продолжает перемещаться в сторону транспортирования, т. к. остановы 26 не препятствуют вращению роликов 16 в направлении транспортирования. Для обратного движения груза узел 20 стыковочного механизма 11 реверсирует вращение, в результате чего ролики 10 получают возможность свободно вращаться в противоположную сторону. Сила трения груза о ролики меняет свое направление, и груз
начинает двигаться в обратном направлении.
Основным преимуществом, обусловливающим технико-экономическую эффективность, является устранение привода для
перемещения груза в каждой ячейке. Появляется возможность увеличения высоты склада благодаря значительному снижению веса металлоконструкции. Конструкция приводного роликового настила грузовой площадки позволяет выдавать груз непосредственно на транспортные средства потребителю, что сводит к минимуму применение перегрузочных механизмов. Кроме того, улучшаются условия эксплуатации склада за счет лучшего распределения нагрузок на ролики и сами грузы.
Формула изобретения
Склад для хранения щтучных грузов, содержащий многоярусные стеллажи, в каждой ячейке которых на раме смонтированы грузонесущие ролики, и устройство для загрузки и разгрузки стеллажей с
подъемно-опускной кареткой, снабженной
закрепленными на раме каретки грузонесущими роликами, отличающийся тем, что, с целью улучшения условий эксплуатации, рамы каждой ячейки и подъемно-опускной каретки установлены лодвижно в горизонтально расположенных направляющих, смонтированных соответственно на каждом ярусе стеллажа и подъемно-опускной каретке, .при этом ро.лики указанных рам снабжены реверсив-ными механизмами свободного хода, а рама каретки - приводом ее горизонтального перемещения и механизмом стыковки с рамами ячеек стеллалса.
Источники информации, принятые во внимаиие при экспертизе:
1.Журнал «Blech Rohre Profile, 1976, 23, № 6, с. 181-182.
2.Авторское свидетельство СССР № 132124, кл. В 65 G 60/00, 1959 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки и разгрузки многоярусных стеллажей | 1979 |
|
SU893733A1 |
| СКЛАД ДЛЯ ХРАНЕНИЯ ШТУЧНЫХ ГРУЗОВ | 1966 |
|
SU182051A1 |
| Устройство для загрузки и разгрузки стеллажейСКлАдА | 1979 |
|
SU839883A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| ВЗССО'гОЗНАЯ | 1973 |
|
SU368153A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Склад для штучных грузов | 1973 |
|
SU590193A1 |
| Склад для хранения цилиндрических изделий | 1982 |
|
SU1036628A1 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ГРАВИТАЦИОННЫ?СТЕЛЛАЖЕЙ^^..v-.-^jIJ П г ЬФ1Д ШШпЕГш! | 1970 |
|
SU435995A1 |