Изобретение относится к сельскохозяйственному машиностроению, а именно к механизмам навески аппара тов хлопкоуборочных маилин.
По основному авт. св. № 820719 известен механизм навески аппаратов хлопкоуборочной машины, содержащий шарннрно смонтированный на раме углвой рычаг, одно плечо которого связано с управляющим гидроцилиндром, а другое плечо, несущее хлопкоуборочные аппараты, выполнено по длине из. двух звеньев, соединенных посредством шарнира, причем несущее плечо углового рычага содержит упор смонтированный в месте соединения его звеньев/ с возможностью взаимодействия со звеном, несущим аппарат а ось шарнира, соединягошего звенья несущего плеча, расположена перпендикулярно направлению перемещения машины.
Недостатком этого механизма является отсутствие копирования поверхности междурядий в поперечной плоскости, относительно направления перемещения машины.
Цель изобретения - повышение эффективности копирования аппаратами поверхности междурядий.
Указанная цель достигается тем, что ось шарнира, соединяющего звень составного плеча рычага, ра сположена в вертикальной плоскости, пар.аллельной направлению перемещения машны, причем звено плеча углового рычага, имеющее упор, установлено с возможностью перемещения вдоль оси шарнира, соединяющего звенья составного плеча, при этом упор выполнен в виде пальца, а взаимодействующая с упором поверхность звена, несущего аппараты, выполнена .вогнутой.
На фиг. 1 схематично представлен механизм навески, расположенный на хлопкоуборочной машине, вид сбоку на фиг. 2 - механизм навески, вид сверху; на фиг. 3 - место соединения звеньев составного плеча углового р ычага, продольное сечение; на фиг. 4 - сечение А-А на фиг. 3; на фиг. 5 - сечение Б-Б на фиг. 3.
.1 1еханизм навески содержит шарнирно смонтированный на раме 1 хлопкоуборочной машины угловой рычаг 2, одно, плечо которого шарнирно соединено со штоком цилиндра 3, а другое плечо, несущее хлопкоуборочные аппараты 4, выполнено по длине из двух звеньев 5 и б, соединенных посредством шарлира 7, и имеет упор 8 смонтированньай за одно целое со звеном 5 и расположенный в месте соединения звеньев 5 и б с возможностью взаимодействия со звеном 6. Звено 5 составнрго плеча рычага 2 установлено с возможностью перемещения вдоль оси 9 шарнира 7, причем ось 9 расположена в вертикальной плоскости,параллельной направлению перемещения машины, при этом упор 8 выполнен в виде пальца, а взаимодействующая с упором 8 поверхность 10 звена 6,несущего аппараты 4, выполнена вогнутой. Каждый из хлопкоуборочных аппаратов 4 подвешен на раме 1 машины посредством соответствующего углового рычага 2 и реактивной тяги 11 и имеет средство копирования рельефа междурядий 12.
При работе хлопкоуборочной машины аппараты 4 перемещаются по поверхности междурядий, опираясь на средство для копирования 12, система KOTOpoio управляет положением аппаратов по высоте через гидроцилиндр 3, шарнирно соединенный с угловым рычагом 2, который соединен .с аппаратами 4 посредством универсального шарнира 13. Универсальный шарнир 13 имеет две горизонтальные оси поворота 14 и 15 и вертикальную ось поворота 16. Вокруг горизонтальной оси 14 уборочный аппарат 4 покачивается вертикальной плоскости при работе машины в рядках. Вокруг горизонтальной оси 15 аппарат 4 покачивается при его подъеме и опускании. Относительно оси 16 аппарат незначительно поворачивается при стабилизации его положения независимо от наклон% оси 9 шарнира 7.
При встрече с препятствием копиры 12 поднимаются и подают сигнал цилиндру 3, который поднимает аппараты 5 на необходимую высоту. При поперечных колебаниях машины самоустановка аппаратов 4 в среднем положении относительно оси обрабатываемого рядка осуществляется шарниром 7 и взаимодействием упора 8 с вогнутой поверхностью 10, и отклонение аппарата 4 в любую сторону вызывает набегание поверхности 10 на палец 8 и осуществляется относительное перемещение звеньев 5 и 6 составного плеча углового рычага 2. Усилие, вызванное подъемом аппарата 4 по поверхности 10, стремится возвратить :аппарат в среднее положение и противодействовать его вращению относительно оси 9 шарнира 7,
При поперечных колебаниях машины уборочный аппарат 4 от действия силы тяжести и пространственного кулачкового соединения(упора 8 и поверхности 10) звеньев 5 и 6 составного плеча самоустанавливается в среднем положении, что повышает эффективность работы уборочных аппаратов.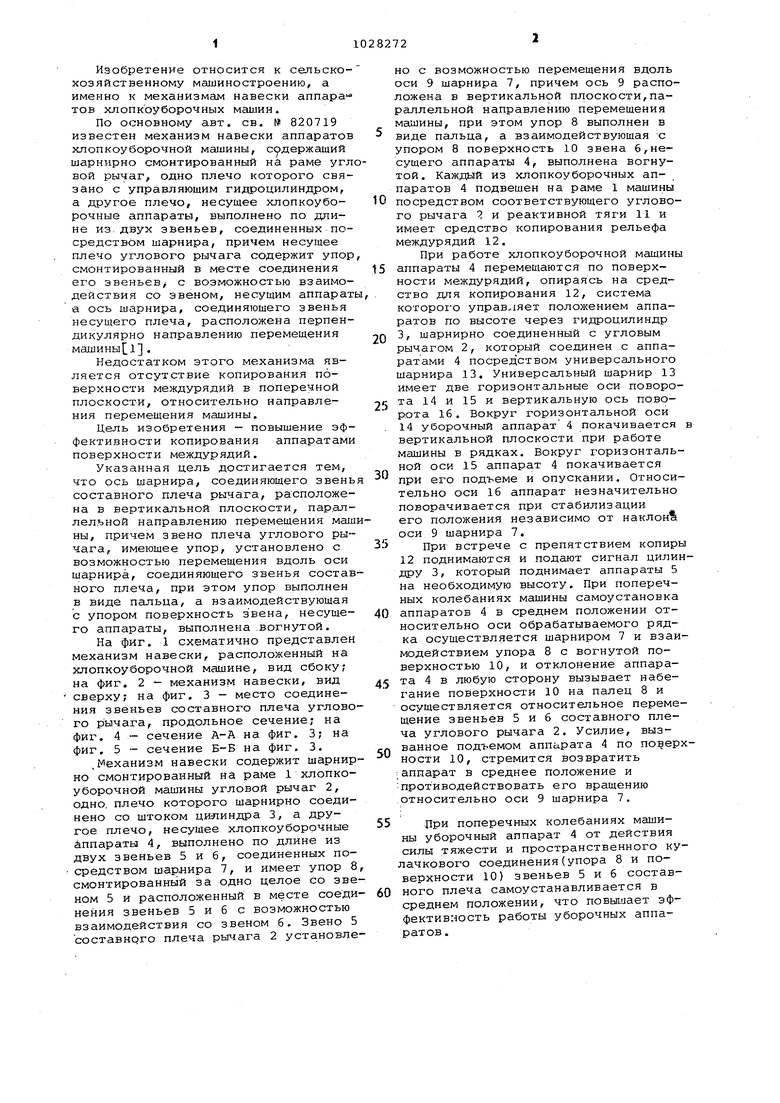
| название | год | авторы | номер документа |
|---|---|---|---|
| Многорядная хлопкоуборочная машина | 1986 |
|
SU1407418A1 |
| Устройство для блоков навески аппаратов уборочной машины | 1989 |
|
SU1657096A1 |
| Механизм навески блока аппаратовХлОпКОубОРОчНОй МАшиНы | 1979 |
|
SU820717A1 |
| Привод аппарата хлопкоуборочной машины | 1983 |
|
SU1245276A1 |
| Механизм подвески аппаратов многорядной уборочной машины | 1975 |
|
SU572240A1 |
| Рабочий орган подборщика хлопка | 1988 |
|
SU1699373A1 |
| Хлопкоуборочный аппарат | 1972 |
|
SU471880A1 |
| Многорядная хлопкоуборочная машина | 1975 |
|
SU553957A1 |
| Копировальное устройство хлопкоуборочного аппарата | 1983 |
|
SU1248554A1 |
| Копирующее устройство срезающего аппарата капустоуборочной машины | 1979 |
|
SU982574A1 |
ИЕХАНЙЗ НАВЕСКИ АППАРАТОВ ХЛОПКОУБОРОЧНОЙ НАШИШ ПО авт. св. 820719, О т л и ч-аio а и и с я тем, что, с целью повьооеиия тивности копирования аппг атамй по верхности междурядий,:ось шарнира, соединя101оег@ звенья состешного пмеча рычага, расположена в вертикальной плоскости, параллельной нааравле НИК) перемещения Maummii, примем з)ве но плеча угл даого рычага : ймепвхее . уйор, установлено с воэмсЯснос1Ь1в. перемещения вдоль оси шартфа, соединя19щего звенья составного пйвча„ этом упор выполнен в виде паль-г ца, а взаимодействующая с упорм йоверхность звена, несущего annajjaibi, , выполнена BofHjfтой. S 1 / / I / /1 Й6гОЧЖ Х 
Ю
K
Т
5-5
Фиг.З
Фиг.5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм навески аппаратов хлопко-убОРОчНОй МАшиНы | 1979 |
|
SU820719A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
