(54) ТРАНСПОРТЕР ДЛЯ ШАГОВОГО ПЕРЕМЕЩЕНИЯ ГОРИЗОНТАЛБНОЙ СТОПКИ БЕЗОПОЧНЫХ ФОРМ
этом привод шарнирно связан с неподвижными основанием 2.
Недостатки такого транспортера заключаются в том, что в процессе работы боковые прижимы скользят по боковой поверхности форм как при рабочем, так и при обратном холостом ходе, а работа осуществляется за счет изменения силы трения прижимов относительно литейных форм, что приводит к быстрому износу рабочих поверхностей прижимов, в процессе работы эти поверхности самошлифуются и трение уменьшается. Кроме того, прижимы на боковых поверхностях формы вырабатывают канавки, что может привести к прорыву металла при заливке, а из-за отсутствия жесткой связи штока силового привода прижима с рамой при обратном холостом ходе прижим не может отойти от ряда форм, и оба прижима скользят по их поверхности (износ прижимов, канавки на боковых поверхностях форм). В результате возможно проскальзывание прижимов при их рабочем ходе относительно форм. Ряд форм при этом не продвинется на шаг, что приводит к их разрушению прессовыталкиваюш,ей плитой формовочной машины. Этому же способствует образование боковых канавок на поверхности форм. Поскольку по ходу движения стопки глубина канавок будет увеличиваться, возможен не захват форм прижимами, что также вызывает разрушение форм прессовыталкиваюшей плитой.
В известном транспортере привод рамы с одной стороны шарнирно прикреплен через крышку бесштоковой полости к основанию, а с другой - через шток шарнирно-рычажной системой к раме. При его работе возникает изгибаюший момент, который вызывает износ штоковой втулки.
Цель изобретения - устранение проскальзывания прижимов относительно безопочных форм, т. е. обеспечение их надежного транспортирования, исключающего случаи разрушения форм, снижение износа прижимов и штоковой втулки привода рамы.
Поставленная цель достигается тем, что силовой привод для перемещения прижима шарнирно закреплен на раме вдоль его продольной оси, а его шток связан шарнирнорычажной системой с подвижным прижимом и рамой. Один из роликов-ограничителей закреплен на склизе и имеет возможность взаимодействия с подвижным прижимом, а другой - подпружинен, закреплен на раме и взаимодействует со склизом. Кроме того, шарнирная опора, связывающая привод рамы со склизом, соединена с корпусом привода в центре тяжести последнего.
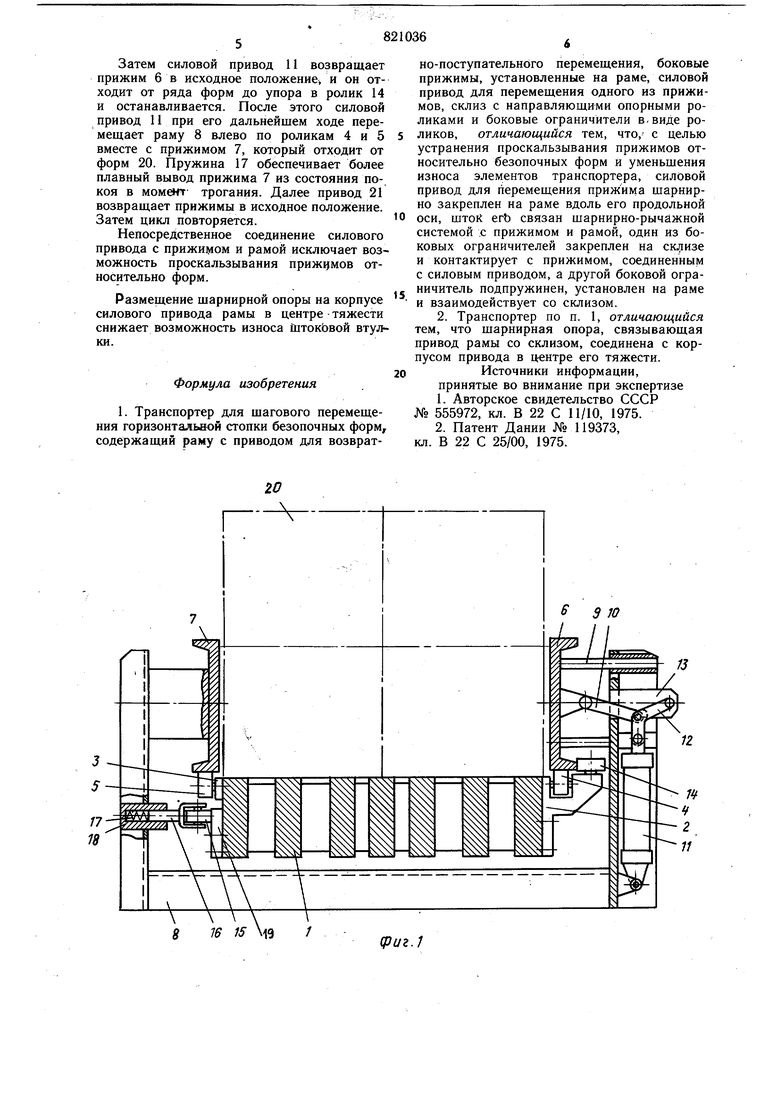
На фиг. 1 представлен транспортер, разрез; на фиг. 2 - то же, вид сбоку.
Склиз 1 в виде решетки неподвижно закреплен на основании (на фиг. не показано). На склизе на его боковых сторонах закреплены кронштейн 2 и пластина 3, на
которых с возможностью вращения вокруг горизонтальной оси расположены направляющие опорные ролики 4 и 5, на которых размещены боковые прижимы 6 и 7. Прижим 7 неподвижно закреплен на раме 8,
охватывающей с боков и снизу склиз 1. Прижим 6 установлен на раме 8 с помощью направляющих скалок 9 с возможностью возвратно-поступательного перемещения в горизонтальном направлении. При этом прижим 6 шарнирно связан рычагом 10 со штоком силового привода 11 для его перемещения. Привод 11 шарнирно закреплен вдоль своей продольной оси на раме 8, и его шток шарнирно связан рычагом 12 с кронштейном 13, жестко закрепленным на раме 8.
На кронштейне 2 установлен ограничитель в виде ролика 14, который взаимодействует с подвижным прижимом 6, а ролик-ограничитель 15 закреплен в обойме 16, хвостовая часть которой подпружинена пружиной 17 и размещена с возможностью перемещения во втулке 18, жестко связанной . с рамой 8. При этом ролик 15 взаимодействует со склизом 1 посредством установленного на нем платика 19. На склизе размещен ряд форм 20, Для возвратно-поступатель5 ного перемещения рамы 8 служит 21, корпус которого шарнирно закреплен в опоре 22, неподвижно установленной на склизе 1. При этом ось шарнирна 23 проходит через центр тяжести корпуса привода 21, а его шток 24 шарнирно-рычажной системой 25
0 соединен с перекладиной 26, соединяющей ряд опоясывающих рам 8. При этом ось одного из шарнироь закреплена посредством кронштейна 27 на склизе 1.
Количество опоясываюших рам 8 и си, ловых приводов 11 устанавливается вдоль прижимов в зависимости от длины транспортера.
Транспортер работает следующим образом.
В исходном положении между прижимом
0 6 и рядом форм 20 имеется зазор в 1-2 мм. Формы 20 изготавливают в формообразующей камере и с помощью прессовыталкивающей плиты (не фиг. не показана) сдвигают на неподвижный склиз 1. Одновременно происходит перемещение ряда форм в собранном виде. Для этого включают силовой привод 11, и он перемещает прижим 6 до контакта с рядом форм. При этом прижим отходит от ролика 14. Когда усилие привода замкнется на формах, рама 8 начинает свое
0 перемещение вправо по роликам 4 и 5. При этом пружина 17 сжимается, прижим 7 подводится к формам с заданым усилием. Ряд форм оказывается зажатым между прижимами 6 и 7. Затем включают привод 21, и происходит перемещение ряда форм на
5 шаг, равный толщине одной формы. Это перемещение за счет системы управления синхронно с работой формовочной машины (на фиг. не показана). Затем силовой привод 11 возвращает прижим 6 в исходное положение, и он отходит от ряда форм до упора в ролик 14 и останавливается. После этого силовой привод 11 при его дальнейшем ходе перемещает раму 8 влево по роликам 4 и 5 вместе с прижимом 7, который отходит от форм 20. Пружина 17 обеспечивает более плавный вывод прижима 7 из состояния покоя в момент трогания. Далее привод 21 возвращает прижимы в исходное положение. Затем цикл повторяется. Непосредственное соединение силового привода с прижимом и рамой исключает возможность проскальзывания прижцмов относительно форм. Размещение шарнирной опоры на корпусе силового привода рамы в центре тяжести снижает возможность износа штокЬвой втулки. Формула изобретения 1. Транспортер для шагового перемещения горизонтальной стопки безопочных форм, содержащий раму с приводом для возвратно-поступательнбго перемещения, боковые прижимы, установленные на раме, силовой привод для перемещения одного из прижимов, склиз с направляющими опорными роликами и боковые ограничители в.виде роликов, отличающийся тем, что, с целью устранения проскальзывания прижимов относительно безопочных форм и уменьшения износа элементов транспортера, силовой привод для перемещения прижима шарнирно закреплен на раме вдоль его продольной оси, шток егЬ связан шарнирно-рычажной системой .с прижимом и рамой, один из боковых ограничителей закреплен на скризе и контактирует с прижимом, соединенным с силовым приводом, а другой боковой ограничитель подпружинен, установлен на раме „ взаимодействует со склизом. 2. Транспортер по п. 1, отличающийся тем, что шарнирная опора, связывающая привод рамы со склизом, соединена с корпусом привода в ц-ентре его тяжести. Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР 555972, кл. В 22 С 11/10, 1975. 2. Патент Дании № 119373, л. В 22 С 25/00, 1975.

| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортер | 1975 |
|
SU555972A1 |
| Приспособление для поштучного захвата упругопластичных материалов | 1982 |
|
SU1100314A1 |
| Установка выбивки стопочных безопочных форм | 1981 |
|
SU982843A1 |
| Установка для упаковки продуктов в картонные коробки | 2020 |
|
RU2730764C1 |
| Автоматическая линия для изготовления безопочных форм с вертикальным разъемом | 1978 |
|
SU749566A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| Устройство для укладки в тару листов | 1986 |
|
SU1330008A1 |
| Транспорт для перемещения литейных форм | 1984 |
|
SU1212688A1 |
| Загрузочное устройство шлифовального станка | 1987 |
|
SU1569171A1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК СТАЛЬНЫХ ХОЛОДНОГНУТЫХ ПРОФИЛЕЙ ТИПА П И С | 2024 |
|
RU2828529C1 |

Т 16 15 19 (риг.1
22 23 21 7 8 //
(риг. 2. 2f
