. t ,:
Изобретение относится к ,способам балансирования поплавковых узлов различных изделий, например, гироскопических приборов, датчиков линейных ускорений и т.д.
Известен способ определения плавучести, дифферента и момента неуравновешенности поплавковых узлов вокруг продольной оси, заключающийся в том, что с помощью навешивания и перемещения контрольных грузов определяют параметры статической неуравновешенности поплавковых узлов 1.
- Недостатком этого способа является то, что все три параметра неуравновешенности определяют последовательно в результате выполнения приемов или операций, это объясняет большую трудоемкость и небольшую точность процесса балансировки.
Наиболее близким техническим решением к изобретению является способ определения параметров статической неуравновешенности поплавковых узлов, заключающийся в том, что узел погружают в ванну с жидкостью, при горизонтальном положении его продольной оси определяют силы реакции на его опорах, по этим силам определяют параметры статической неуравновешенности узлов 2.
Недостатком известного способа является то, что он позволяет одновременно определить только параметры плавучести и дифферента и не позволяет определить третий параметр статической неуравновешенности поплавкового узла - момент его Стати0ческой неуравновешенности относительно продольной оси.
Цель изхэбретения одновременное определение всех трех параметров статической неуравновешенности поплав5кового узла, повышения точности и производительности процесса.
Поставленная цель достигается тем, что на одну его опору устанавливают рычаг; при горизонтальном положении
0 продольной оси узла и рычага определяют значения сил реакции на одной опоре узла и двух концах рычага, ус-т тановленнОго на другой опоре; по значениям сил реакции определяют параметры плавучести и дифферента узла и одну проекцию вектора момента его . неуравновешенности вокруг продольной оси; затем узел поворачивают на 90 вокруг его продольной оси, определяют новые значения сил реакции на концах рычага, по ним определяют вторую проекцию вектора момента его неуравновешенн ти; по первой и второй проекциям определяют значение момента неуравновешенности узла вокруг его продольной оси.
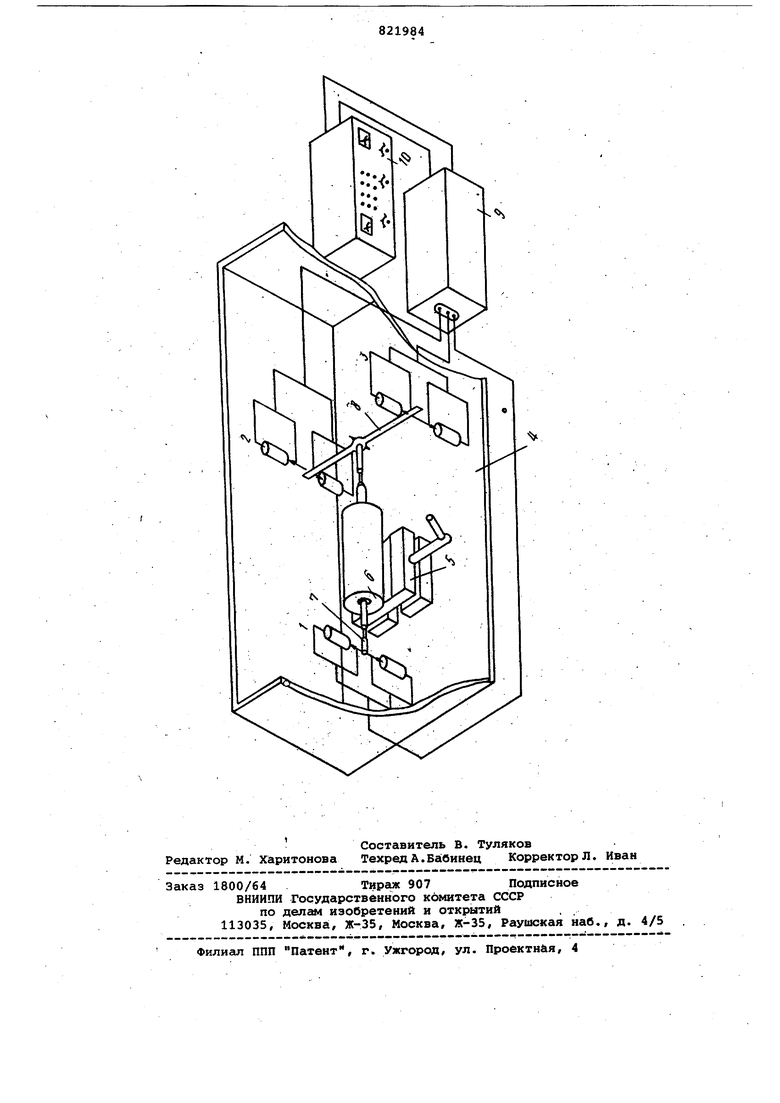
На чертеже показано устройство для реализации описываемого способа.
Устройство содержит датчики 1,2 и 3 силы, расположенные в ванне 4 р жидкостью, в которой находятся также подставка 5, поплавковый узел б, захват 7, измерительный рычаг 8, счетно-решающий блок 9 и показывающий или записывающий блок 10.
Реализация способа осуществляется следующим образом.
Поплавковый узел 6 устанавливается на подставке 5, одна его опора соединяется с захватом 7, другая опора с измерительным рычагом 8, После этого подставка 5 спускается, дат чики силы выдают сигналы, пропорциональные силам реакций д, о и д на одной опоре узла и двух концах рычага длиной I. По этим силам реакций определяют
а)отклонение от плавучести узла
.,
б)реакции на .опорах узла б из-за момента его дифферента
в) первую проекцию векторамомент уравновешенности узла б вокруг его продольной оси
()
После этого узел 6 поворачивают на 90 вокруг продольной оси, опред ляют новые значения gj и g сил реакций на концах рычага 8, а по ним BTOpyip проекцию вектора момента неуравновешенности ли. по аналогичному выражеййю, - что и для лМ Затем по двум проекциям определяют значение момента неуравновешенности узла б вокруг продольной оси
. j
Указанные вычисления выходных сигг 50 налов датчиков силы могут производиться счетно-решающим блоком 9 и значения л G , л О идм могут показываться или записываться на блоке 10.
. Таким образом обеспечивается определение плавучести, дифферента и момента статической неуравновешенности узла на одном рабочем месте, что уменьшает трудоемкость и погрешности определения указанных параметров.
Формула изобретения
Способ определения параметров статической неуравновешенности попЛавковых узлов, заключающийся- в том, что узел погружают в ванну с жидкостью,, при горизонтальном положении его продольной оси определяют силы реакции на eto опорах, по этим.силам определяют параметры статической неуравновешенности узла, отличающийс я тем, что, с целью одновременного определения всех трех параметров статической неуравновешенности узла, повышения точности и производительности этого процесса, на одну его опору устанавливают рычаг, при горизонтальном положениях продольной оси узла и рычага определяют значения сил реакции на одной опоре узла и дву крнцах рычага, установленного на другой опоре, по значениям сил реакций определяют плавучесть и дифферент узла и одну проекцию вектора момента его неуравновешенности вокруг продольной оси, затем узел поворачивают на 90° вокруг его продольной оси, .определяют новые значения сил реакции на концах рычага, по ним определяют вторую проекцию вектора момента его неуравновешенности, по первой и второй проекциям определяют значение момента неуравновешенности узла вокруг его продольной оси.
Источники информации, принятые во внимание при экспертизе
1.Ковалев М.П., Моржаков С.П., Терехова К.С. Динамическое и статическое уравновешивание гироскопических . устройств. М., Машиностроение, 1974 с. 228-229.
2.Там же,.с. 232-233 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДИФФЕРЕНТА ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОПРИБОРА, НАПРИМЕР ИНТЕГРИРУЮЩЕГО ГИРОСКОПА | 1977 |
|
SU1840722A1 |
| Устройство для балансировки поплавковых гироузлов | 1980 |
|
SU983476A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДИФФЕРЕНТА ПОПЛАВКОВОЙ ГИРОКАМЕРЫ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2015 |
|
RU2591287C1 |
| Устройство для балансировки поплавковых гироузлов | 1980 |
|
SU957026A1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| СПОСОБ БАЛАНСИРОВКИ ГИРОКАМЕРЫ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2016 |
|
RU2648023C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2013 |
|
RU2526513C1 |
| СПОСОБ ПРОВЕРКИ ДЕФЕКТА ОПОР ГИРОУЗЛА В ПОПЛАВКОВОМ ГИРОСКОПИЧЕСКОМ ДАТЧИКЕ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2019 |
|
RU2730369C1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| СПОСОБ ЦЕНТРИРОВАНИЯ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО ПРИБОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2149357C1 |