1
Изобретение относится к приборостроению, преимущественно к балансировке поплавковых гироскопических приборов.
Известно устройство для балансировки поплавковых гироузлов, содержащее основание, балансировочную рамку для установ- 5 ки поплавкового гироузла, измерительный механизм, выполненный в виде чувствительного перемещению пьезокварцевого элемента с двумя электродами, и блок измерения, выполненный из последовательно соединен- Q ных усилителя и регистрирующего прибора 1.
Недостатками устройства являются сложность конструкции и низкая точность измерения, связанная с малой чувствительностью пьезокварцевого элемента, измеряющего ста- 15 тический дисбаланс поплавкового гироузла.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для балансировки поплавковых гироузлов, содержащее осно- Q вание, балансировочную рамку для установки поплавкового гироузла, источник опорного напряжения, блок измерения и два электромагнитных подвеса, установленных по обе стороны рамки и выполненных каждый в виде четырехполюсного статора с внутренним расположением полюсов, закрепленного на основании так, что два полюса направлены горизонтально, а два других - вертикально, якоря, закрепленного на оси рамки, четырех конденсаторов и четырех обмоток возбуждения, установленных на полюсах статора, соединенных одним выводом непосредственно с источником опорного напряжения, а другим - через конденсатор 2.
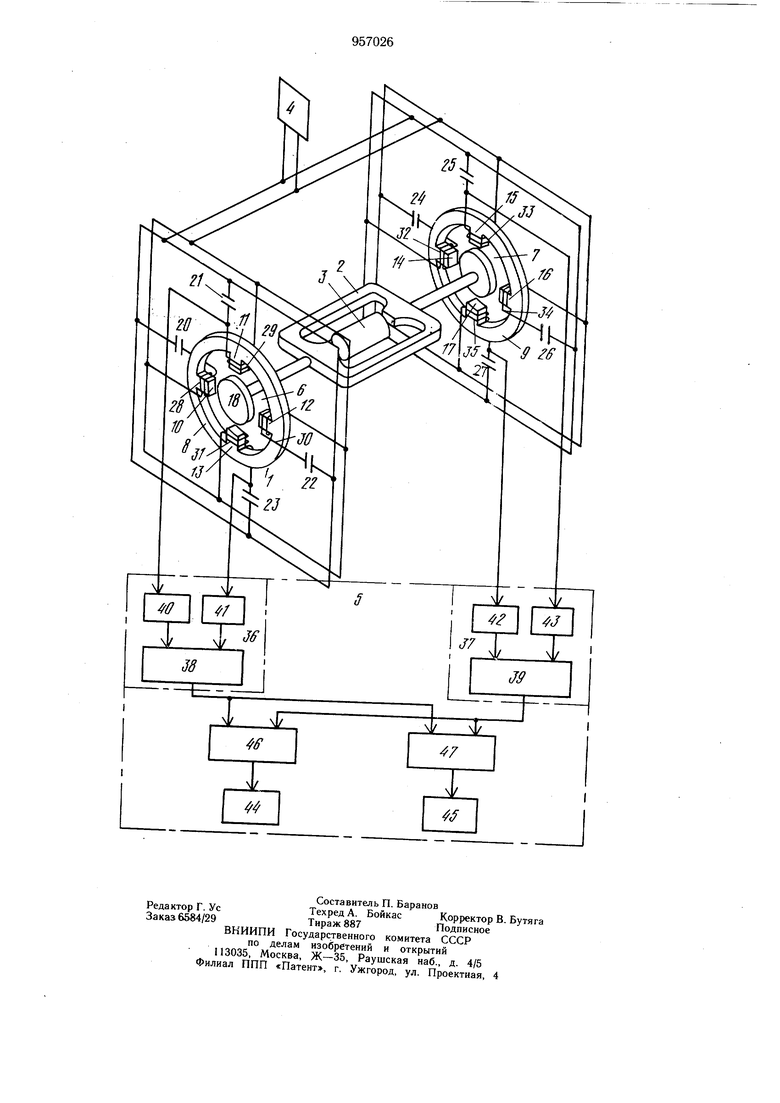
Недостатком известного устройства является то, что сигнал дисбаланса, представляющий собой напряжения, снимаемые с электромагнитных подвесов, характеризует лищь факт наличия дисбаланса гироузлов, однако не позволяет определить его знак, т. е. выяснить причину неуравновещенности, правый (левый) дифферент, остаточный вес или плавучесть. Это усложняет процесс балансировки и делает его более длительным, так как оператору приходится дополнительно определять знак плавучести или дифферента и проводить вычисления параметров неуравновещенности по показаниям регистрирующих приборов, что усложняет работу оператора. Целью изобретения является упрощение процесса балансировки и повышение ее производительности, а также облегчение работы оператора. Поставленная цель достигается тем, что в устройстве для балансировки поплавковых гироузлов, содержащем основание, балансировочную рамку для установки поплавкового гироузла, источник опорного напряжения, блок измерения и два электромагнитных подвеса, установленных по обе стороны рамки и выполненных каждый в виде четырехполюсного статора с внутренним расположением полюсов, закрепленного на основании так, что два полюса направлены горизонтально, а два других - вертикально, якоря, закрепленного на оси рамки, четырех конденсаторов и четырех обмоток возбуждения, установленных на полюсах статора, соединенных одним выводом непосредственно с источником опорного напряжения, а другим - через конденсатор, блок измерения выполнен в виде двух каналов, каждый из которых содержит схему вычитания и два амплитудных детектора, входы которых подключены к соответствующей точке соединения конденсаторов и обмоток возбуждения, установленных на вертикально расположенных полюсах статора соответствующего электромагнитного подвеса, а выходы связаны со входами схемы вычитания, а также в виде двух регистрирующих приборов, подключенных к ним выходами сумматора и третьей схемы вычитания, входы которых соединены параллельно и подключены, соответственно, к выходам первой и второй схем вычитания. Такое выполнение устройства позволяет измерять дифферент и плавучесть балансируемых гироузлов, не проводя дополнительных вычислений, и, следовательно, способствует сокращению времени и упрощению процесса балансировки. На чертеже представлена структурная блок-схема устройства. Устройство содержит основание 1, балансировочную рамку 2 для установки поплавкового гироузла 3, источник 4 опорного переменного напряжения, блок 5 измерения и два электромагнитных подвеса б и 7, установленных по обе стороны рамки 2 и выполненных каждый в виде четырехполюсного статора 8 (9) с внутренним расположением полюсов 10-13 (14-17), закрепленного на основании так, что два полюса 10 и 12 (14-16) направлены горизонтально, а два 11 и 13 (15 и 17) других - вертикально, якоря 18 (19), закрепленного на оси рамки 2, четырех конденсаторов 20-23 (24-27) и четырех обмоток 28-31 (32-35) возбуждения, установленных на полюсах 10-13 (14-17) статора 8 (9), соединенных общим выводом непосредственно с источником 4 опорного напряжения, а другим - через конденсатор 20-23 (24-27). Блок измерения 5 выполнен в виде двух каналов 36 и 37, каждый из которых содержит схему 38 (39) вычитания и два амплитудных детектора 40 и 41 (42-43), входы которых подключены к соответствующей точке соединения конденсаторов 21 и 23 (25 и 27) и обмоток 29 и 31 (33 и 35) возбуждения, установленных на вертикально расположенных полюсах И и 13 (15 и 17) статора 8 (9) соответствующего электромагнитного подвеса 6 и 7, а выходы связаны со входами схемы вычитания 38 (39), двух регистрирующих приборов 44-45 и подключенных к ним выходами сумматора 46 и третьей схемы 47 вычитания, входы которых соединены параллельно и подключены соответственно к выходам первой и второй схем 38 и 39 вычитания. Устройство работает следующим образо.м. Для измерения дифферентов и плавучести балансируемого поплавкового гироузла 3 его закрепляют в предварительно отбалансированной рамке 2, на которой заранее закреплены якори 18 и 19 электромагнитных подвесов 6 и 7. Рамку 2 вводят в межполюсное пространство статоров 8 и 9 и погружают в ванну с балансировочной жидкостью (не показано). В случае идеально сбалансированного гироузла 3, якоря 18 и 19 займут центральное положение между полюсами 10-17 статоров 7 и 8. При наличии неуравновешенности гироузла 3 якори 18 и 19 смещаются в вертикальном направлении, что приводит к изменению индуктивностей вертикально расположенных обмоток 29, 31, 33 и 35 и возникновению центрирующих усилий F и РЗ в каждом подвесе 6 и 7. При этом балансировочная рамка 2 с гироузлом 3 и якорями 18 и 19 будет находиться в состоянии равновесия, которое характеризуется уравнениями АСт ± (F. + F); Мд„Ф ±E(F,-F,), где G - остаточный вес (или плавучесть) поплавкового гироузла 3; момент дифферента; I-расстояние от точки приложения центрирующих усилий до центра объема балансируемого гироузла 3 (зависит от конструкции). Знак плюс в уравнениях (1) и (2) соответствует плавучести и левому дифференту, минус - остаточному весу и правому дифференту. Изменение индуктивностей обмоток 29, 31, 33 и 35, вызванное смещением якорей 18 и 19 из центрального положения, приводит к изменению напряжения на этих обмотках 29, 31, 33 и 35, которое линейно связано с величиной смещения якоря 18 (19) и может быть представлено уравнением и Uo ± Ьб, где и 0-напряжение на обмотке при центральном положении якоря 18 (19); Ь - конструктивный коэффициент. В общем случае, когда балансируемый гироузел 3 имеет остаточный вес (плавучесть и дифферент, состояние равновесия характеризуется смещением левого якоря 18 на расстояние 6j от центрального положения правого 19 - на расстояние бг- При этом напряжения UIB, гъ верхних обмотках 29 и 33 соответственно подвесов 6 и 7 и напряжения UIH и U2H на их нижних 31 и 35 обмотках будут определяться уравнениями UIB Uo ± Ь6,;(4) U2B Uo±b62-,(5) U,H Uc,±b6,;(6) Ьб2.(7) Знак плюс или минус в уравнениях (4) - (7) зависит от направления смещения якоря 18 (19) (вверх или вниз). Эти напряжения подаются на входы амплитудных детекторов 40-43 и преобразуются в постоянные, которые поступают на входы схем вычитания 38 и 39, реализующих уравнения - 4Ui и,в-и, ±2bbi-.(8) AUa Uzt, - U2H ±2 Ьбг -(9) Таким образом, -если якоря 18 и 19 находятся в центральном положении, то UIB UIH .U2B и, следовательно, ;AUi AU2 0. Знак напряжений AUt и AU зависит от направления смещения якорей 18 и 19. Сумматор 46 и третья схема 47 вычитания реализуют уравнения иг /iUi + лиг ±2Ь( 6i + 62); (Ю) и AUi - AU2 ±2Ь( 6,-&г)- (И) Центрирующие усилия в пределах зоны функционирования подвесов 6 и 7 линейно связаны с величиной смещений 6 якорей 18 и 19 F, k&, иРг k&2,(12) где k - конструктивный коэффициент. Выражая из (12) Si к 62 и подставляя их У1равнения (10) и (11) получим Ui ±fb(F, + F2); ± t(F|- F). 2I.(14) Сравнивая последние соотнощения с уравнениями (1) и (2), приходим к выводу, что сигналы и, и и пропорциональны измеряемым параметрам неуравновешенности поплавкового гироузла, а именно и ± AG;(15) .р.(16) Напряжения Uj. и U подаются на регистрирующие приборы 44 и 45 (например, вольтжетры), щкалы которых проградуированы в величинах веса и момента. Таким образом, новое построение блока измерения в устройстве для балансировки поплавковых гироузлов и его варианте обеспечивает возможность измерения величины и знака параметров неуравновещенности балансируемого гироузла. Последнее исключает неопределенность имеющую место в известном устройстве. Это позволяет упростить операцию балансировки, и обеспечи; вает сокращение времени операций в 1,5- 2 раза по сравнению с известными. Годовой экономический эффект от внедрения предлагаемого устройства по предварительным расчетам составит около 100 тыс. руб. Формула изобретения Устройство для балансировки поплавковых гироузлов, содержащее основание, балансировочную рамку для установки поплавкового гироузла, источник опорного напряжения, блок измерения и два электромагнитных подвеса, установленных по обе стороны рамки и выполненных каждый в виде четырехполюсного статора с внутренним расположением полюсов, закрепленного на основании так, что два полюса направлены горизонтально, а два других - вертикально, якоря, закрепленного на оси рамки, четырех конденсаторов и четырех обмоток возбуждения, установленных на полюсах статора, соединенных одним выводом непосредственно с источником опорного напряжения, а другим - через конденсатор, отличающееся тем, что, с целью упрощения процесса балансировки и повышения ее производительности, блок измерения выполнен в виде двух каналов, каждый из которых содержит схему вычитания и два амплитудных детектора, входы которых подключены к соответствующей точке соединения конденсаторов и обмоток возбуждения, установленных на вертикально расположенных полюсах статора соответствующего электромагнитного подвеса, а выходы связаны со входами схемы вчитания, а также в виде двух регистрирующих приборов, подключенных к ним выходами сумматора и третьей схемы вычитания, входы которых соединены параллельно и подключены, соответственно, к выходам первой и второй схем вычитания. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 697818, кл. G 01 М 1/12, 1978. 2.Гоцеридзё Р. М. Универсальная установка для уравновешивания поплавковых чувствительных элементов в жидкости. - Сб. «Уравновешивание роторов и механизмов. Под ред. проф. Щепетильникова. М., «Мащиностроение, 1978, с. 207-210 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для балансировки поплавковых гироузлов | 1980 |
|
SU983476A1 |
| Устройство для балансировки сферических поплавковых гироузлов | 1982 |
|
SU1084634A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕБАЛАНСА ГИРОУЗЛА ВИБРАЦИОННЫМ МЕТОДОМ | 2023 |
|
RU2815479C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Устройство для динамической балансировки роторов | 1980 |
|
SU917017A1 |
| СПОСОБ ПРОВЕРКИ ДЕФЕКТА ОПОР ГИРОУЗЛА В ПОПЛАВКОВОМ ГИРОСКОПИЧЕСКОМ ДАТЧИКЕ УГЛОВОЙ СКОРОСТИ (ВАРИАНТЫ) | 2019 |
|
RU2730369C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Реверсивный двигатель-усилитель | 1985 |
|
SU1293798A1 |
| ИНДУКТОРНАЯ МАШИНА | 2010 |
|
RU2422971C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |