Изобретение относится к области приборостроения, к способам испытаний поплавковых гироскопических датчиков угловой скорости (ДУС), и может быть использовано при их технологических и производственных исследованиях.
Известен способ испытаний материалов камневых опор с помощью трибометра [1]. Располагают образец на трибометре, задают величину давления, скорость и время трения образца, измеряют диаметр пятна износа и по его величине судят об износостойкости образца.
Этот способ не предназначен для исследования камневых опор в устройстве пользователя и является дальним аналогом предлагаемого способа.
Известен способ контроля внешнего вида поверхностей камневых опор [2]. Способ применяют как производители, так и пользователи камневых опор. Помещают контролируемую поверхность в поле обзора бинокулярного микроскопа и контролируют ее различные дефекты, при этом оценивают также чистоту (шероховатость) участков рабочих поверхностей опоры. Способ близок по назначению, но не имеет общих операций с предлагаемым способом, и рассматривается как аналог.
Способ не дает объективной оценки вида дефекта, наблюдаемого как повышение шероховатости с образованием налета продуктов износа на рабочих поверхностях опор гироузла, демонтированного из исследуемых поплавковых приборов (безобогревных ДУС). Например, по экватору сферического окончания цапфы, на ее зеркальной поверхности наблюдается матовый поясок, который соответствует зоне контакта цапфы со сквозным камнем опоры. Причем приборы с дефектом такого вида, как правило, оказываются разбалансированными. Недостатком известного способа является невозможность идентификации данного вида, отнесения его к разряду дефектов, вызывающих разбалансировку гироузла, таких как смещение гиромотора, проникновение жидкости в полость гироузла и т.п. Данный дефект (ранее не встречавшийся в ДУС) не изменяет размеров и форм рабочих поверхностей камневых опор и не приводит к смещению центра масс гироузла с оси цапф. Поэтому он может не расцениваться как причина разбалансировки, приводящей к превышению допуска выходного сигнала ДУС, зависимого от линейного (кажущегося) ускорения. Известный способ позволяет констатировать наличие вида дефекта, но не дает численной оценки его влияния на указанный выходной сигнал. В результате преждевременной разборки исследуемого ДУС, без диагностики дефекта как причины отказа, ее обоснование становится невозможным. Кроме того, известный способ не позволяет контролировать приработку опор гироузла (камневых опор) при изготовлении приборов, так как требует разборки поплавкового ДУС. Недостатки способа контроля внешнего вида поверхностей камневых опор приводят к необходимости его дополнения при исследовании указанного вида дефекта опор гироузла поплавковых ДУС.
Задачей изобретения является получение оценки проявлений дефекта по выходным сигналам ДУС, измеренным на этапах его изготовления и испытаний.
Заявленный способ имеет два варианта, которые могут использоваться по отдельности или комплексно, дополнять друг друга.
Указанная задача выполняется за счет того, что:
1. В способе проверки дефекта опор гироузла в поплавковом гироскопическом датчике угловой скорости (ДУС), характеризующемся тем, что устанавливают ДУС на углозадающем устройстве так, что ось опор гироузла горизонтальна; задают постоянное значение температуры в приборе, отличное от температуры нулевой плавучести гироузла; включают усилитель обратной связи ДУС; задают n (n=1, 2 …) значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в одном направлении отсчетов круговой шкалы; после задания каждого угла измеряют выходной сигнал ДУС; задают те же n значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в противоположном направлении отсчетов круговой шкалы, после задания каждого угла повторно измеряют выходной сигнал ДУС; находят угол трения в опорах: ψn=k|I+n-I-n|/Pd, где I+n, I-n - измеренные выходные сигналы ДУС при n-ом значении угла в одном и противоположном направлении отсчетов круговой шкалы; Р - остаточный вес гироузла; d - диаметр цапфы опор гироузла; k - постоянная; неоднократно на протяжении регулирования ДУС измеряют выходной сигнал ДУС; если ψn≤μ в процессе проверки, где μ - норма коэффициента трения для трущейся пары опор гироузла, делают вывод об отсутствии дефекта опор гироузла в ДУС; если значения ψn уменьшаются в процессе проверки, делают вывод о качественной приработке опор гироузла в ДУС.
2. Способ проверки дефекта опор гироузла в поплавковом гироскопическом датчике угловой скорости (ДУС), характеризующийся тем, что устанавливают ДУС на углозадающем устройстве так, что ось опор гироузла горизонтальна; задают постоянное значение температуры в приборе, не равное температуре нулевой плавучести гироузла; включают усилитель обратной связи ДУС; включают гиромотор; задают n (n=1, 2 …) значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в одном направлении отсчетов круговой шкалы; после задания каждого угла измеряют выходной сигнал ДУС; задают те же n значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в противоположном направлении отсчетов круговой шкалы, после задания каждого угла повторно измеряют выходной сигнал ДУС; находят: ΔJn=|J+n-J-n|, где J+n, J-n - измеренные выходные сигналы ДУС при n-ом значении угла в одном и противоположном направлении отсчетов круговой шкалы; если ΔJn≥[J], где [J] - диапазон назначенного допуска выходного сигнала, зависимого от линейного кажущегося ускорения, диагностируют наличие дефекта опор гироузла.
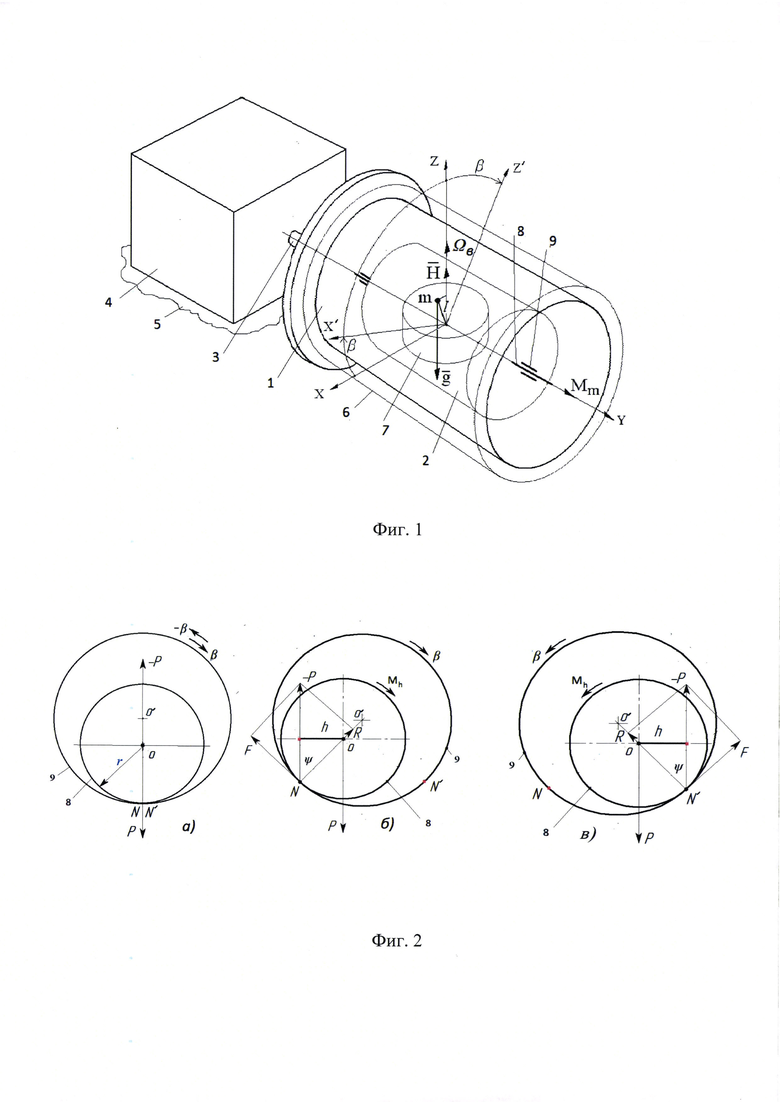
На фиг. 1 показан двухстепенный поплавковый гироскопический ДУС в устройстве, реализующем предлагаемый способ. На фиг. 2 - три характерные положения цапфы гироузла в подшипнике скольжения (сквозном камне) опоры, занимаемые ею при работе ДУС. На фиг. 3, фиг. 4, фиг. 5 - графики, приведенные для объяснения соответственно первого и второго вариантов способа.
На фиг. 1 обозначено: 1 - корпус ДУС; 2 - гироузел; 3 - вал углозадающего устройства; 4 - углозадающее устройство; 5 - неподвижное основание; 6 - колпак термокамеры; 7 - гиромотор. На фиг. 1 и фиг. 2 обозначено: 8 - цапфа опоры гироузла; 9 - сквозной камень (подшипник) опоры гироузла.
Рассмотрим проведение подготовительных и измерительных операций способа, используя фиг. 1 и фиг. 2.
На фиг. 1 показана система координат XYZ, связанная с корпусом 1 ДУС, прикрепленным к валу 3. Через β обозначен угол поворота вала 3, отсчитываемый по абсолютной круговой шкале углозадающего устройства 4, и на этом угле показано повернутое положение корпуса 1 ДУС (X'YZ'). На фиг. 1 также показаны: - вектор кинетического момента ротора гиромотора; Ωв - вертикальная составляющая угловой скорости Земли;
- вектор кинетического момента ротора гиромотора; Ωв - вертикальная составляющая угловой скорости Земли;  - ускорение силы тяжести; m - точка центра масс гироузла; Mm - момент дебаланса гироузла относительно оси цапф. На фиг. 2 показаны: сила остаточного веса гироузла (Р) и уравновешивающая ее сила реакции опоры (-Р); N (N') - точка контакта цапфы 8 в отверстии сквозного камня 9; R и F - сила нормальной реакции и сила трения на диаметре отверстия сквозного камня 9; ψ и h - угол и плечо трения; Mh - активный момент, действующий в опоре; стрелки β и (-β) - направления задания угла β. Устанавливают ДУС 1 (фиг. 1) с возможностью поворотов на угол β вокруг горизонтально ориентированной оси Y опор гироузла 2, в частности, на горизонтальном валу 3 углозадающего устройства 4, фиксированного на неподвижном основании 5. С помощью термокамеры 6 задают постоянное значение температуры в приборе, не равное температуре нулевой плавучести гироузла, например, более высокое. Плотность жидкости уменьшается, и на сквозные камни 9 со стороны цапф 8 гироузла 2 (фиг. 1) действует сила его остаточного веса, которая уравновешена силой реакции сквозных камней опор, эти силы показаны на фиг. 2. Пусть трение в опорах отсутствует, тогда сила остаточного веса гироузла (Р), прижимающая цапфу 8 гироузла к нижней точке сквозного камня 9, и сила его реакции (-Р) действуют на одной линии и не создают момента в опорах гироузла (фиг. 2а). Включают усилитель обратной связи ДУС.
- ускорение силы тяжести; m - точка центра масс гироузла; Mm - момент дебаланса гироузла относительно оси цапф. На фиг. 2 показаны: сила остаточного веса гироузла (Р) и уравновешивающая ее сила реакции опоры (-Р); N (N') - точка контакта цапфы 8 в отверстии сквозного камня 9; R и F - сила нормальной реакции и сила трения на диаметре отверстия сквозного камня 9; ψ и h - угол и плечо трения; Mh - активный момент, действующий в опоре; стрелки β и (-β) - направления задания угла β. Устанавливают ДУС 1 (фиг. 1) с возможностью поворотов на угол β вокруг горизонтально ориентированной оси Y опор гироузла 2, в частности, на горизонтальном валу 3 углозадающего устройства 4, фиксированного на неподвижном основании 5. С помощью термокамеры 6 задают постоянное значение температуры в приборе, не равное температуре нулевой плавучести гироузла, например, более высокое. Плотность жидкости уменьшается, и на сквозные камни 9 со стороны цапф 8 гироузла 2 (фиг. 1) действует сила его остаточного веса, которая уравновешена силой реакции сквозных камней опор, эти силы показаны на фиг. 2. Пусть трение в опорах отсутствует, тогда сила остаточного веса гироузла (Р), прижимающая цапфу 8 гироузла к нижней точке сквозного камня 9, и сила его реакции (-Р) действуют на одной линии и не создают момента в опорах гироузла (фиг. 2а). Включают усилитель обратной связи ДУС.
Во втором варианте способа (в отличие от первого варианта) включают гиромотор. Выходным сигналом ДУС в любом варианте является ток, пропорциональный моментам, действующим на гироузел вокруг оси Y. Этот ток протекает через обмотку датчика момента, установленного на оси Y (не показан), который обеспечивает удержание гироузла относительно корпуса 1 ДУС на одном и том же угле вокруг оси Y. Уравнение статического равновесия моментов, действующих на гироузел относительно оси Y, имеет вид - в первом и втором вариантах способа соответственно:

где I(J) - ток на выходе ДУС в первом и втором вариантах способа (А);
k - коэффициент датчика момента (Нм/А);
Mm(Lm) - момент дебаланса гироузла (Нм);
Mh(Lh) - активный момент, созданный трением в опорах гироузла (Нм);
Мс(Lc) - постоянный момент (Нм);
 - гироскопический момент (Нм).
- гироскопический момент (Нм).
Гироскопический момент в уравнении (2) (при запущенном гиромоторе) равен векторному произведению кинетического момента Н ротора гиромотора 7 на горизонтальную составляющую Ωв угловой скорости Земли (фиг. 1). В уравнении (1) при незапущенном гиромоторе он отсутствует. В оба уравнения входят постоянный момент типа тяжения токоподводов гироузла и момент дебаланса гироузла относительно оси цапф 8, которые могут изменяться в результате включения гиромотора (Mm≠Lm„ Мс≠Lc). Момент дебаланса Lm гироузла объясняется на фиг. 1 малым смещением  точки центра масс m гироузла с оси цапф, остающимся после его балансировки в жидкости поплавкового прибора. Активный момент, создаваемый трением в опорах гироузла, объясняется на фиг. 2 малым смещением, на величину плеча трения h, линии действия силы остаточного веса гироузла (Р) относительно линии действия уравновешивающей ее силы реакции сквозного камня (-Р). Из фиг. 2б, фиг. 2в имеем при незапущенном гиромоторе:
точки центра масс m гироузла с оси цапф, остающимся после его балансировки в жидкости поплавкового прибора. Активный момент, создаваемый трением в опорах гироузла, объясняется на фиг. 2 малым смещением, на величину плеча трения h, линии действия силы остаточного веса гироузла (Р) относительно линии действия уравновешивающей ее силы реакции сквозного камня (-Р). Из фиг. 2б, фиг. 2в имеем при незапущенном гиромоторе:

при запущенном гиромоторе имеем аналогично:

где  - плечо трения при незапущенном (запущенном) гиромоторе.
- плечо трения при незапущенном (запущенном) гиромоторе.
Активный момент (3), создаваемый трением в опорах гироузла, уменьшается в результате запуска гиромотора, Lh<Mh, так как вибрации гиромотора уменьшают плечо трения  Износ опор гироузла приводит к возрастанию активного момента (3), (4), образуемого парой сил на плече трения
Износ опор гироузла приводит к возрастанию активного момента (3), (4), образуемого парой сил на плече трения  в опоре. Активный момент Lh, создаваемый трением в опорах гироузла, добавляется к моменту Lm дебаланса гироузла и ухудшает его балансировку, выполненную при изготовлении прибора.
в опоре. Активный момент Lh, создаваемый трением в опорах гироузла, добавляется к моменту Lm дебаланса гироузла и ухудшает его балансировку, выполненную при изготовлении прибора.
Поворачивая вал 3 (фиг. 1), задают разные углы абсолютной круговой шкалы углозадающего устройства в одном направлении поворотов вала. В частности задают углы β, поочередно 0°, 30°, 60° … 360°. При повороте вала 3 поворачиваются прикрепленный к нему корпус 1 ДУС и удерживаемый (электрически) относительно корпуса гироузел 2. При этом цапфа 8 (фиг. 2б), увлекаемая силой трения F, скользит по окружности сквозного камня 9, оставаясь в точке N. В опоре образуются угол и плечо трения (ψ и h), и возникает пара сил (Р и -Р) с плечом трения h, то есть активный момент (Mh), который при первом направлении поворотов (по стрелке β, фиг. 1 и фиг. 2б), действует по часовой стрелке (отрицателен). После задания угла β в одном направлении поворотов вала, поочередно 0°, 30°, 60° … 360°, на каждом из них измеряют значения выходного сигнала (I+ или J+). Уравнения (1) и (2) принимают вид:


Поворачивая вал 3, задают разные углы абсолютной круговой шкалы углозадающего устройства в противоположном направлении поворотов вала. То есть задают углы β поочередно 360°, 330°, 300° … 0°. При повороте вала 3 вместе с ним поворачиваются прикрепленный к нему корпус 1 ДУС и удерживаемый (электрически) относительно корпуса 1 гироузел 2. При этом цапфа 8, увлекаемая силой трения F, скользит по окружности сквозного камня 9, оставаясь в точке N' (фиг. 2в). В опоре образуются угол и плечо трения (ψ и h), и возникает пара сил (Р и -Р) с плечом трения h, то есть активный момент (Mh), который при противоположном направлении поворотов (по стрелке -β, фиг. 2в), действует против часовой стрелки (положителен). После задания угла β в противоположном направлении поворотов вала, поочередно 360°, 330°, 300° … 0°, на каждом их них измеряют значения выходного сигнала ДУС (I- или J-). Уравнения (1) и (2) принимают вид:


Совместно решая уравнения (5), (7) и уравнения (6), (8), находим:


где ΔIn - абсолютная величина разности выходных сигналов ДУС при n-м значении угла в одном и противоположном направлении отсчетов круговой шкалы (при незапущенном гиромоторе);
ΔJn - абсолютная величина разности выходных сигналов ДУС при n-м значении угла в одном и противоположном направлении отсчетов круговой шкалы (при запущенном гиромоторе).
Второй вариант способа позволяет исследовать дефект износа опор гироузла, не изменяющий размеры и формы их рабочих поверхностей, его распознавание как причины разбалансировки ДУС, приводящей к превышению допуска выходного сигнала ДУС, зависимого от линейного (кажущегося) ускорения.
Рассмотрим реализацию первого варианта способа для двух приборов, один из которых не имеет дефекта износа опор гироузла, а другой - имеет.
Проводят для приборов подготовительные и измерительные (объясненные) операции способа, причем не включают гиромотор. Используя коэффициент датчика момента, пересчитывают найденную по формуле (9) величину |I+n-I-n| в момент, действующий вокруг оси опор подвеса гироузла в ДУС:

Из треугольника с гипотенузой ON (фиг. 2б, 2в), равной радиусу цапфы (r), следует:

Подстановкой формулы (11) в формулу (12), находим:

где ψn - угол трения в опорах гироузла (радиан), I+n, I-n - измеренные выходные сигналы ДУС при n-ом значении угла в одном и противоположном направлении отсчетов круговой шкалы; d - диаметр цапфы (d=2r).
Угол трения в опоре скольжения численно можно принимать равным коэффициенту трения скольжения [Хандельсман Ю.М. Камневые опоры. - М.: Машиностроение, 1973, с. 39]:

где μ - коэффициент трения скольжения.
Коэффициент трения (μ) является нормируемой величиной для опор скольжения. Например, для трущейся пары «корунд-сталь инструментальная» в жидкости он не должен превышать 0,07 («Справочник конструктора точного машиностроителя». Под ред. д.т.н. Ф.Л. Литвина. «Машиностроение», М-Л. 1964, с. 912). По справочнику коэффициент трения составляет 0,15, что соответствует моменту начала движения тел при отсутствии между ними смазки. Коэффициенты трения движения на 30-40% меньше. Наличие смазки между трущимися поверхностями снижает его в полтора-два раза. Тогда имеем: Ψ=0,15(1-(30…40%)/100%)/1,5…2≤0,07.
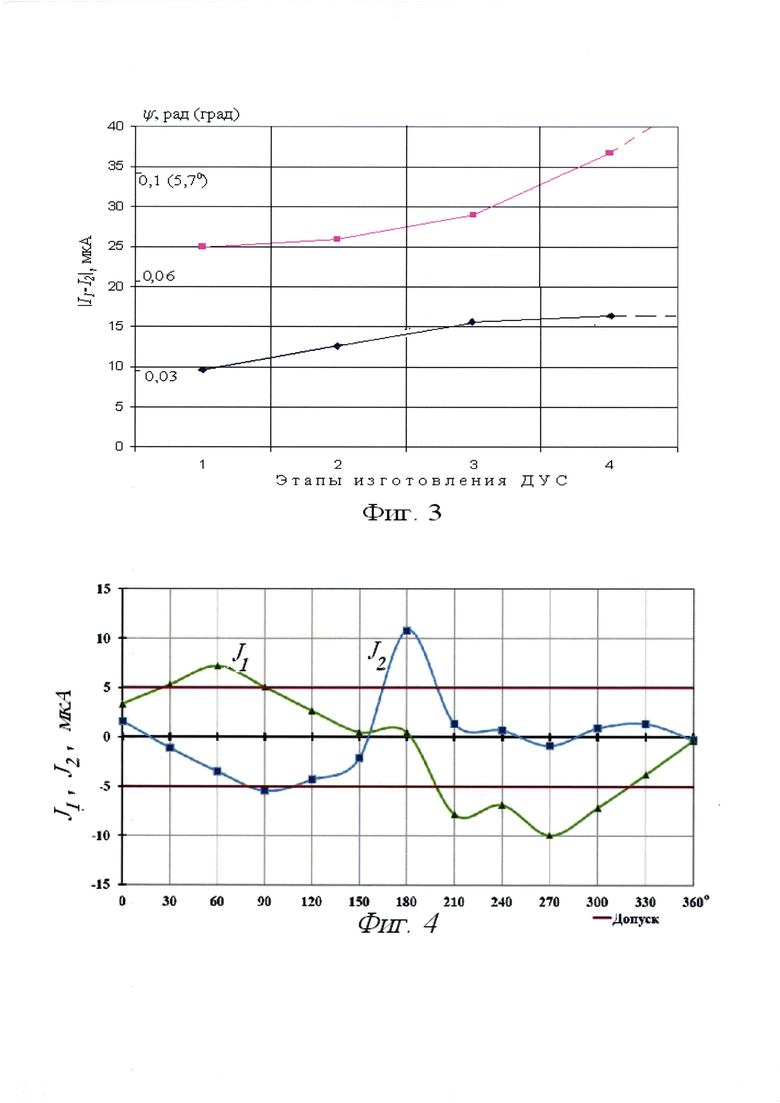
Если угол трения численно не превышает указанной нормы, то есть ψn≤μ, делают вывод об отсутствии дефекта износа опор гироузла в ДУС. Этим завершается проверка ДУС, являющаяся однократной реализацией первого варианта способа. Неоднократно повторяют проверку ДУС на протяжении техпроцесса регулирования ДУС. Анализируют изменение величины |I+n-I-n| от проверки к проверке, и по характеру этого изменения судят о качестве приработки опор, зависящего от их износостойкости и соблюдения техпроцесса регулирования ДУС. Анализ проводят следующим образом. Вычисляют среднее значение величины |I+-I-|, измеренной на каждом заданном угле β, характеризующее состояние износа опор по окружности рабочей зоны контакта цапф со сквозными камнями опор. По результатам проверок ДУС, например, на четырех этапах его регулирования 1, 2, 3, 4 - строят график, характеризующий приработку опор гироузла в ДУС (фиг. 3). На фиг. 3 по оси абсцисс - этапы регулирования ДУС: 1 - функционирование после заполнения жидкостью, 2 - масштабирование, 3 - балансировка, 4 - замер выходных сигналов ДУС. По оси ординат |I+-I-| - абсолютная величина разности выходных сигналов ДУС, измеренных с разных направлений задания угла β (при не запущенном гиромоторе), а также соответствующие значения угла трения (ψ). Значения кривых графика отражают взаимодействие трущихся поверхностей опор гироузла, зависящее от их износа. Значения нижней кривой (годный прибор) стремятся к пределу, что является необходимым условием длительной работы опор гироузла в приборе. Для последней точки нижней кривой (при k=6⋅10-4 гсм/мкА и |I+-I-|=20 мкА) угол трения составляет ψ=0,05 и не превышает нормы (меньше 0,07). Верхняя кривая (дефектный прибор) носит возрастающий характер, что означает ускоренный износ опор гироузла. Для последней точки верхней кривой (при k=6⋅10-4 гсм/мкА и |I+-I-|=20 мкА) угол трения составляет ψ=0,15 и превышает норму (больше 0,07). Можно констатировать, что в первом приборе дефект износа опор отсутствует, и качество приработки опор гироузла удовлетворительное, второй прибор имеет не удовлетворительное состояние опор. Отметим, что он не удовлетворяет норме коэффициента трения на этапе 1 (верхняя кривая, фиг. 3), то есть сразу после заполнения жидкостью, что дает основание предполагать появление дефекта износа опор при его сборке. Но для отбраковки ДУС нет оснований, так как при использовании поплавкового гироскопа по назначению трение в опорах гироузла в значительной мере гасится вибрациями гиромотора. Не исключено, что ДУС выдержит дальнейшие испытания. Поэтому все приборы регулируют, включая заключительный этап 4 - замер выходных сигналов. Причем для их замера прибор должен быть предварительно сбалансирован на этапе 3 техпроцесса регулирования ДУС.
Как следует из рассмотренных примеров, первый вариант способа дает возможность исследовать техпроцесс изготовления ДУС и контролировать приработку опор гироузла, а также выявлять на раннем этапе производства (при регулировании ДУС) экземпляры некачественных, не износостойких из числа применяемых камневых опор.
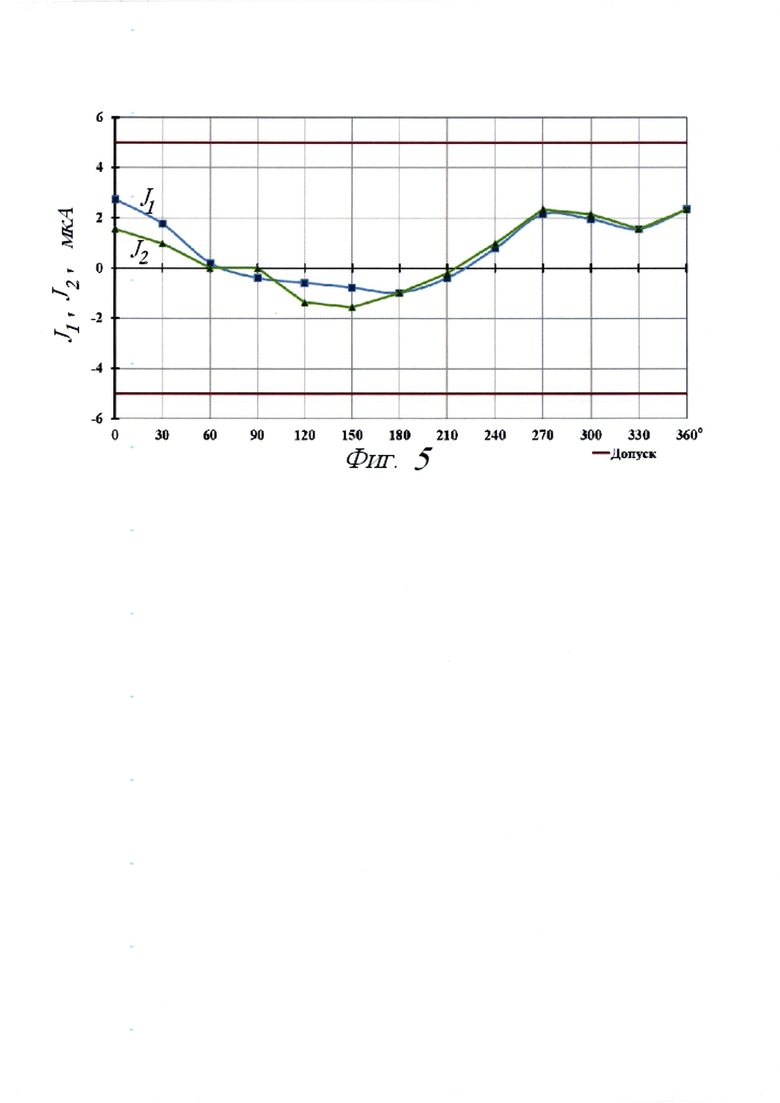
Рассмотрим реализацию второго варианта способа (для тех же двух приборов), используя фиг. 4 и фиг. 5. На фиг. 4 и фиг. 5 по оси абсцисс графиков - последовательность задаваемых углов β. По оси ординат выходные сигналы ДУС, обозначенные через J+ и J- при запущенном гиромоторе.
Предположим, в дефектном приборе на заключительном этапе регулирования (на этапе 4, фиг. 3) произошло превышение допуска (отказ) по параметру - выходной сигнал, зависимый от линейного (кажущегося) ускорения, и прибор должен быть подвергнут технологическому исследованию. Цель исследования - получить численную оценку влияния износа опор гироузла на параметр отказа, что можно сделать только до разборки ДУС, по его выходным сигналам. Исследование отказа ДУС проводится (согласно второго варианта способа) следующим образом.
Проводят подготовительные и измерительные (объясненные) операции способа, причем после включения цепи формирования выходного сигнала ДУС включают гиромотор. На фиг. 4 для исследуемого (дефектного) прибора построен график, включающий две кривые. Кривая J+ построена для углов β (фиг. 1), заданных поочередно 0°, 30°, 60° … 360°, кривая J- - для углов 360°, 330°, 300° … 0°, то есть - в противоположном направлении поворотов по абсолютной круговой шкале углозадающего устройства 4. Для сравнения на фиг. 5 приведен аналогичный график годного прибора, в большем масштабе. На поле графиков выделены границы допуска параметра. В любом из приборов две указанные кривые имеют взаимное расхождение (гистерезис), объясняющееся трением в опорах гироузла. Его значение отражается формулой (10). Находят абсолютную величину разности выходных сигналов ДУС в одном и противоположном направлении отсчетов круговой шкалы при запущенном гиромоторе:
ΔJn=|J+n-J-n|,
где J+n, J-n - измеренные выходные сигналы ДУС при n-ом значении угла в одном и противоположном направлении отсчетов круговой шкалы.
Как следует из графиков, в годном приборе величина |J+n-J-n| мала (фиг 5), в дефектном - превышает пределы допуска (фиг. 4). Если ΔJn≥[J], где [J] - диапазон допуска выходного сигнала, зависимого от линейного (кажущегося) ускорения, диагностируют наличие дефекта износа опор гироузла и производят разборку ДУС на предмет замены опор гироузла. Этим завершается проверка ДУС, согласно второму варианту способа. Далее производится разборка ДУС и контроль внешнего вида поверхностей камневых опор с помощью бинокулярного микроскопа. Если по экватору сферического окончания цапфы в зоне контакта со сквозным камнем опоры наблюдается поясок, подтверждается, что причиной несоответствия ДУС по превышению допуска выходного сигнала, зависимого от линейного (кажущегося) ускорения, является дефект износа опор. Например, в приборе, который не удовлетворяет норме коэффициента трения на этапе 1, то есть сразу после заполнения жидкостью (верхняя кривая, фиг. 3), появление дефекта и превышение допуска вызваны несоответствием износостойкости примененного в данном приборе комплекта камневых опор условиям сборки поплавковых приборов, согласно которым до заливки жидкости на опоры может действовать полный вес гироузла, на порядок превышающий его остаточный (после заливки) вес.
Второй вариант способа позволяет не только проводить исследование отказов, возникающих при испытаниях ДУС после регулирования прибора. По существу, в этом варианте способа реализуется заключительная проверка регулирования прибора, проводимая с заданием углов β в одном направлении поворотов абсолютной круговой шкалы. Но в предлагаемом способе при задании углов с двух разных направлений абсолютной круговой шкалы не требуется предварительного проведения балансировки, так как момент дебаланса Lm, как и прочие моменты, входящие в уравнения (6) и (8), кроме искомого момента Lh, не изменяют знака и сокращаются при совместном решении уравнений. Поэтому второй вариант способа, использующий установленный в документации поплавковых приборов допуск [J] выходного параметра, может быть использован для отбраковки дефектных приборов на раннем этапе регулирования ДУС. Этим предотвращают отказы в заводских испытаниях ДУС, возможные по указанному виду дефекта износа опор, и сокращают время ремонтных циклов по замене опор. Таким образом, второй вариант способа дает возможность идентифицировать (распознавать), диагностировать путем численного анализа и осуществлять предупреждение вида отказов ДУС, вызываемого некачественной приработкой опор гироузла.
Предлагаемый способ заполняет частный пробел в методическом обеспечении производства поплавковых приборов, в части способов исследования качества приработки камневых опор гироузла безобогревных ДУС. Задача изобретения комплексно решается двумя вариантами предлагаемого способа, при этом обеспечивается повышение результативности технологических и производственных исследований ДУС, качества, надежности и процента выхода годных приборов. Предлагаемый способ компенсирует случаи снижения качества (износостойкости) камневых опор, поставляемых для установки в поплавковые приборы. Способ нашел применение, в производстве безобогревных поплавковых ДУС задействована методика и составлены типовые программы исследования (вызываемого изнашиванием) дефекта камневых опор.
Таким образом, заявлено:
1. Способ проверки дефекта опор гироузла в поплавковом гироскопическом датчике угловой скорости (ДУС), характеризующийся тем, что устанавливают ДУС на углозадающем устройстве так, что ось опор гироузла горизонтальна; задают постоянное значение температуры в приборе, отличное от температуры нулевой плавучести гироузла; включают усилитель обратной связи ДУС; задают n (n=1, 2 …) значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в одном направлении отсчетов круговой шкалы; после задания каждого угла измеряют выходной сигнал ДУС; задают те же n значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в противоположном направлении отсчетов круговой шкалы, после задания каждого угла повторно измеряют выходной сигнал ДУС; находят угол трения в опорах: ψn=k|I+n-I-n|/Pd, где I+n, I-n - измеренные выходные сигналы ДУС при n-ом значении угла в одном и противоположном направлении отсчетов круговой шкалы; Р - остаточный вес гироузла; d - диаметр цапфы опор гироузла; k - постоянная; неоднократно на протяжении регулирования ДУС измеряют выходной сигнал ДУС; если ψn≤μ в процессе проверки, где μ - норма коэффициента трения для трущейся пары опор гироузла, делают вывод об отсутствии дефекта опор гироузла в ДУС; если значения ψn уменьшаются в процессе проверки, делают вывод о качественной приработке опор гироузла в ДУС.
2. Способ проверки дефекта опор гироузла в поплавковом гироскопическом датчике угловой скорости (ДУС), характеризующийся тем, что устанавливают ДУС на углозадающем устройстве так, что ось опор гироузла горизонтальна; задают постоянное значение температуры в приборе, не равное температуре нулевой плавучести гироузла; включают усилитель обратной связи ДУС; включают гиромотор; задают n (n=1, 2 …) значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в одном направлении отсчетов круговой шкалы; после задания каждого угла измеряют выходной сигнал ДУС; задают те же n значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в противоположном направлении отсчетов круговой шкалы, после задания каждого угла повторно измеряют выходной сигнал ДУС; находят: ΔJn=|J+n-J-n|, где J+n, J-n - измеренные выходные сигналы ДУС при n-ом значении угла в одном и противоположном направлении отсчетов круговой шкалы; если ΔJn≥[J], где [J] - диапазон назначенного допуска выходного сигнала, зависимого от линейного кажущегося ускорения, диагностируют наличие дефекта опор гироузла.
Техническим результатом изобретения является получение оценки проявлений дефекта по выходным сигналам ДУС, измеренным на этапах его изготовления и испытаний.
Литература:
1. Хандельсман Ю.М. Камневые опоры. - М.: Машиностроение, 1973, с. 22.
2. Хандельсман Ю.М. Камневые опоры. - М.: Машиностроение, 1973, с. 39.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| Выключатель цепей коррекции гироскопических приборов ориентации на вираже | 2021 |
|
RU2759245C1 |
| СПОСОБ ОПЕРАТИВНОЙ ПРОВЕРКИ ГИРОМОТОРА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2682107C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2013 |
|
RU2526513C1 |
| СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННОГО ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 1992 |
|
RU2044274C1 |
Группа изобретений относится к области приборостроения, а именно к способам испытаний поплавковых гироскопических датчиков угловой скорости (ДУС). Способ проверки дефекта опор гироузла в поплавковом гироскопическом датчике угловой скорости (ДУС) содержит этапы, на которых устанавливают ДУС на углозадающем устройстве так, что ось опор гироузла горизонтальна; задают постоянное значение температуры в приборе, отличное от температуры нулевой плавучести гироузла; включают усилитель обратной связи ДУС; задают n значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в одном направлении отсчетов круговой шкалы; после задания каждого угла измеряют выходной сигнал ДУС; задают те же n значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в противоположном направлении отсчетов круговой шкалы, после задания каждого угла повторно измеряют выходной сигнал ДУС; находят угол трения в опорах ψn; если ψn≤μ в процессе проверки, где μ - норма коэффициента трения для трущейся пары опор гироузла, делают вывод об отсутствии дефекта опор гироузла в ДУС; если значения ψn уменьшаются в процессе проверки, делают вывод о качественной приработке опор гироузла в ДУС. Технический результат – получение оценки проявлений дефекта по выходным сигналам ДУС, измеренным на этапах его изготовления и испытаний. 2 н.п. ф-лы, 5 ил.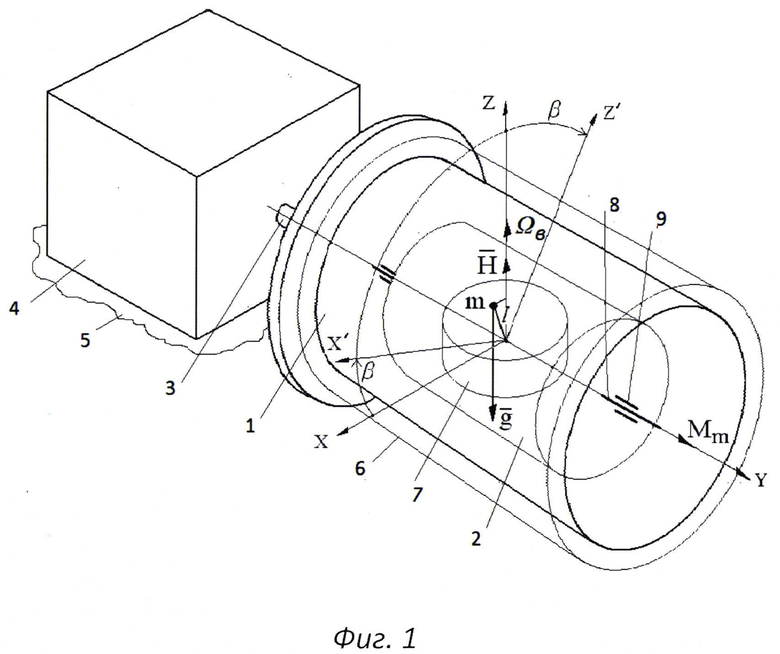
1. Способ проверки дефекта опор гироузла в поплавковом гироскопическом датчике угловой скорости (ДУС), характеризующийся тем, что устанавливают ДУС на углозадающем устройстве так, что ось опор гироузла горизонтальна; задают постоянное значение температуры в приборе, отличное от температуры нулевой плавучести гироузла; включают усилитель обратной связи ДУС; задают n (n=1,2…) значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в одном направлении отсчетов круговой шкалы; после задания каждого угла измеряют выходной сигнал ДУС; задают те же n значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в противоположном направлении отсчетов круговой шкалы, после задания каждого угла повторно измеряют выходной сигнал ДУС; находят угол трения в опорах: ψn=k|I+n-I-n|/Pd, где I+n, I-n - измеренные выходные сигналы ДУС при n-м значении угла в одном и противоположном направлении отсчетов круговой шкалы; Р - остаточный вес гироузла; d - диаметр цапфы опор гироузла; k - постоянная; неоднократно на протяжении регулирования ДУС измеряют выходной сигнал ДУС; если ψn≤μ в процессе проверки, где μ - норма коэффициента трения для трущейся пары опор гироузла, делают вывод об отсутствии дефекта опор гироузла в ДУС; если значения ψn уменьшаются в процессе проверки, делают вывод о качественной приработке опор гироузла в ДУС.
2. Способ проверки дефекта опор гироузла в поплавковом гироскопическом датчике угловой скорости (ДУС), характеризующийся тем, что устанавливают ДУС на углозадающем устройстве так, что ось опор гироузла горизонтальна; задают постоянное значение температуры в приборе, не равное температуре нулевой плавучести гироузла; включают усилитель обратной связи ДУС; включают гиромотор; задают n (n=1,2…) значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в одном направлении отсчетов круговой шкалы; после задания каждого угла измеряют выходной сигнал ДУС; задают те же n значений угла поворота ДУС вокруг горизонтально ориентированной оси опор гироузла в противоположном направлении отсчетов круговой шкалы, после задания каждого угла повторно измеряют выходной сигнал ДУС; находят: ΔJn=|J+n-J-n|, где J+n, J-n - измеренные выходные сигналы ДУС при n-м значении угла в одном и противоположном направлении отсчетов круговой шкалы; если ΔJn≥[J], где [J] - диапазон назначенного допуска выходного сигнала, зависимого от линейного кажущегося ускорения, диагностируют наличие дефекта опор гироузла.
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2007 |
|
RU2339912C1 |
| WO 2011083511 A1, 14.07.2011. | |||

