(54) ЭКСКАВАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Породоразрушающая машина | 1982 |
|
SU1051185A1 |
| Породоразрушающая машина | 1981 |
|
SU1002470A1 |
| Породоразрушающая машина | 1982 |
|
SU1082911A1 |
| Породоразрушающая машина | 1982 |
|
SU1040068A1 |
| Подвеска стрелы рабочего органа роторного экскаватора | 1988 |
|
SU1709022A1 |
| Экскаватор | 1973 |
|
SU646006A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| КАРЬЕРНЫЙ ЭКСКАВАТОР | 2005 |
|
RU2296860C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО ЭКСКАВАТОРА | 2001 |
|
RU2187600C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
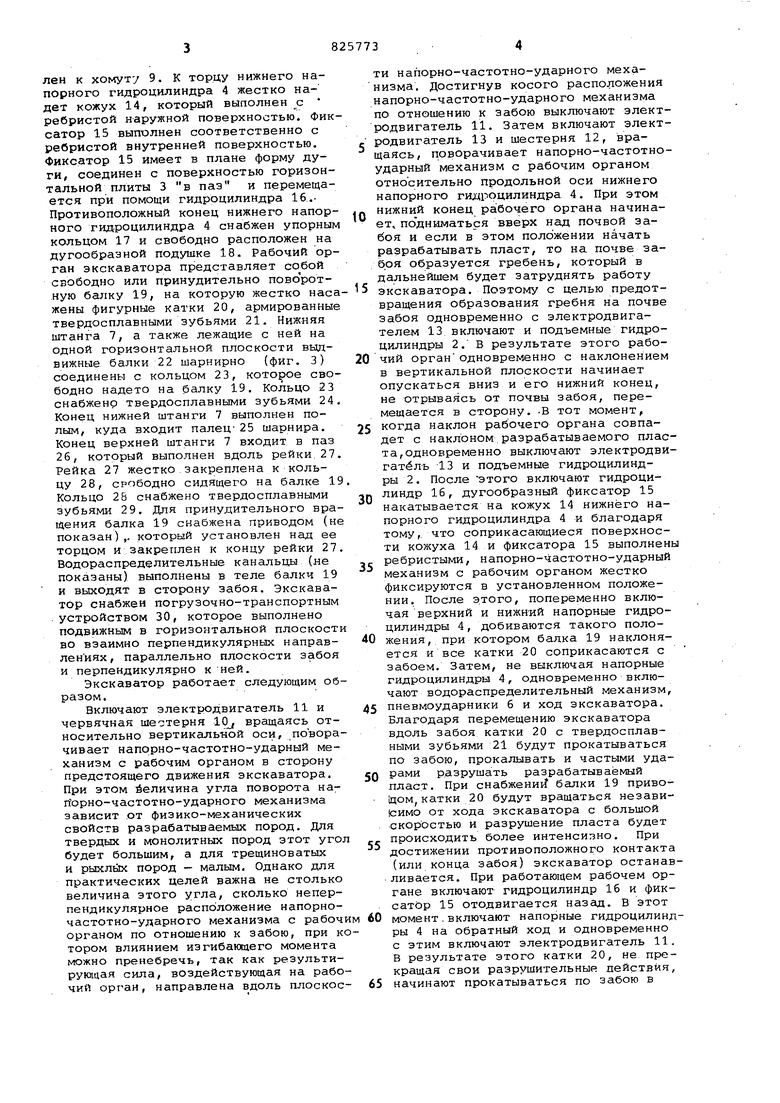
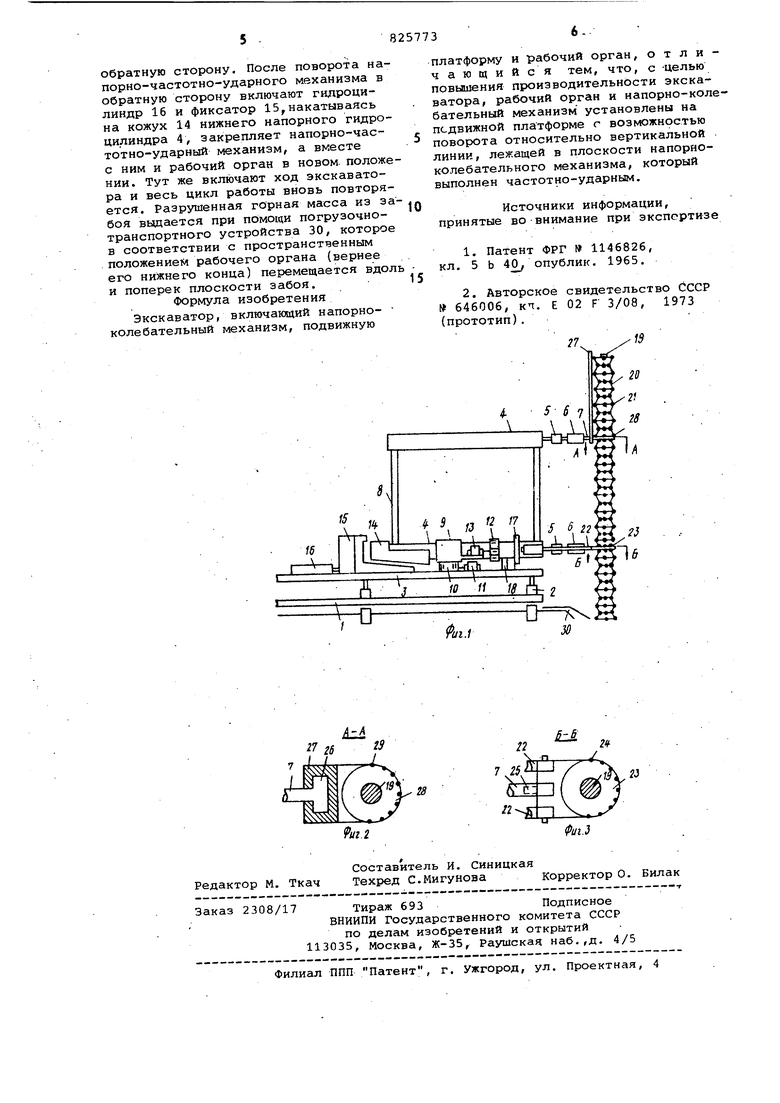
Изобретение относится к земперойным машинам/ а именно к экскаваторам известны экскаваторы, содержащие подвижную платформу, силовое оборудо вание, рабочий орган, погрузочнотранспортное устройство flj. Недостатком его является значительная металлоемкост.ь конструкции. известны также экскаваторы, включаквдие напорно-колебательный механиз подвижную платформу и рабочий орган , Однако такой экскаватор имеет-низ кую производительность. Цель изобретения - повышение производительности экскаватора. Поставленная це|1ь достигается тем что в экскаваторе, включающем напорно-колебательный механизм, подвижную платформу и рабочий орган, рабочий орган и напорно-колебательный механизм установлены на подвижной платформе с возможностью поворота относительно вертикальной линии, лежащей в йлоскости напорно-колебательного механизма, который выполнен частотно ударным.На фиг. 1 изображен экскаватор, общий вид; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Экскаватор содержит силовое оборудование, пульт управления, водораспределительный механизм (не показаны), подвижную платформу 1, на которую установлены подъемные гидроцилиндры 2 и горизонтальная плита 3. На горизонтальной плите 3 расположены ряд напорно-частотно-ударных механизмов, каждый из которых содержит параллельные между собой и установленные в одной плоскости напорные гидроцилиндры 4 и линейно соединенные к ним виброгасящие перемычки 5 и пневмоударники 6 со штангами 7 .Верхний и нижний напорные гидроцилиндры 4 соединены между собой стойками 8. Нижний напорный гидвоцилиндр 4 свободно охвачен хомутом 9, ниж- НИИ конец которого представляет собой червячную шестерню 10, ось которой -торцом свободно-поворотно сидит в теле горизонтальной плиты 3. Червячная шестерня 10 приводится во вращение при помощи электродвигателя 11. На нижний напорный гидроцилиндр 4 жестко надета шестерня 12, которая приводится во врёццение электродвигателем 13. Последний жестко закреплен к хомуту 9. К торцу нижнего напорного гидроцилиндра 4 жестко надет кожух 14, который выполнение ребристой наружной поверхностью. Фик сатор 15 выпилнен соответственно с ребристой внутренней поверхностью. Фиксатор 15 имеет в плане форму дуги, соединен с поверхностью горизонтальной плиты 3 в паз и перемещается при помощи гидроцилиндра 16.Противоположный конец нижнего напорного тидроцилиндра 4 снабжен упорным кольцом 17 и свободно расположен на дугообразной подушке 18. Рабочий орган экскаватора представляет собой свободно или принудительно поворотную балку 19, на которую жестко наса жены фигурные катки 20, армированные твердосплавными зубьями 21. Нижняя штанга 7, а также лежащие с ней на одной горизонтальной плоскости выдвижные балки 22 шарнирно (фиг. 3) соединены с кольцом 23, которое свободно надето на балку 19. Кольцо 23 снабжено твердосплавными зубьями 24 Конец нижней штанги 7 выполнен полым, куда входит палец-25 шарнира. Конец верхней штанги 7 входит в паз 26, который выполнен вдоль рейки 27 Рейка 27 жестко закреплена к кольцу 28, срободно сидящего на балке 1 Кольцо 28 снабжено твердосплавными зубьями 29. Для принудительного вра щения балка 19 снабжена приводом (не показан),, который установлен над ее торцом и закреплен к концу рейки 27 Водораспределительные канальцы (не показаны) выполнены в теле балки 19 и выходят в сторо.ну забоя. Экскаватор снабжен погрузочно-транспортным устройством 30, которое выполнено подвижным в горизонтальной плоскост во взаимно перпендикулярных направлениях, параллельно плоскости забоя и перпендикулярно к ней. Экскаватор работает следующим об разом. Включают электродвигатель 11 и червячная шестерня IQj вращаясь относительно вертикальной оси, повора чивает напррно-частотно-ударный механизм с рабочим органом в сторону предстоящего движения экскаватора. При этом величина угла поворота напорно-частотно-ударного механизма зависит от физико-механических свойств разрабатываемых пород. Для твердых и монолитных пород этот уго будет большим, а для трещиноватых и рыхльк пород - малым. Однако для практических целей важна не столько величина этого угла, сколько неперпендикуЛярное распбложение напорночастотно-ударного механизма с рабоч органом по отношению к забою, при к тором влиянием изгибающего момента можно пренебречь, так как результирующая сила, воздействующая на рабо чий орган, направлена вдоль плоскос и напорно-частотно-ударного мехаизма. Достигнув косого расположения апорно-частотно-ударного механизма о отношению к забою выключают электодвигатель 11. Затем включают электодвигатель 13 и шестерня 12, врааясь, поворачивает напорно-частотноударный механизм с рабочим органом относительно продольной оси нижнего напорного гидроцилиндра 4. При этом нижний конец рабочего органа начинает, подниматься вверх над почвой забоя и если в этом положении начать разрабатывать пласт, то на почве забоя образуется гребень, который в дальнейшем будет затруднять работу экскаватора. Поэтому с целью предотвращения образования гребня на почве забоя одновременно с электродвигателем 13 включают и подъемные гидроцилиндры 2. В результате этого рабочий орган одновременно с наклонением в вертикальной плоскости начинает опускаться вниз и его нижний конец, не отрываясь от почвы забоя, перемещается в сторону. -В тот момент, когда наклон рабочего органа совпадет с наклоном разрабатываемого пласта, одновременно выключают электродвигатель 13 и подъемные гидроцилиндры 2. После ЭТОГО включают гидроцилиндр 16, дугообразный фиксатор 15 накатывается на кожух 14 нижнего напорного гидроцилиндра 4 и благодаря тому,. что соприкасающиеся поверхности кожуха 14 и фиксатора 15 выполнены ребристыми, напорно-частотно-ударный механизм с рабочим органом жестко фиксируются в установленном положении. После Э.ТОГО, попеременно включая верхний и нижнИй напорные гидроцилиндры 4, добиваются такого положения, при котором балка 19 наклоняется и все катки 20 соприкасаются с забоем. Затем, не выключая напорные гидроцилиндры 4, одновременно включают водораспределительный механизм, пневмоударники 6 и ход экскаватора. Благодаря перемещению экскаватора вдоль забоя катки 20 с твердосплавными зубьями 21 будут прокатываться по забою, прокалывать и частыми ударами разрушать разрабатываемой пласт. При снабжени балки 19 привоfcqoM, катки 20 будут вращаться независимо от хода экскаватора с большой скоростью и разрушение пласта будет происходить более интенситзно. При достижении противоположного контакта (или конца забоя) экскаватор останавливается. При работающем рабочем органе включают гидроцилиндр 16 и фиксатор 15 отодвигается назад, в этот момент.включают напорные гидроцилиндры 4 на обратный ход и одновременно с этим включают электродвигатель 11. В результате этого катки 20, не прекращая свои разрушительные действия, начинают прокатываться по забою в
Обратную сторону. После поворота напорно-частотно-ударного механизма в обратную сторону включают гидроцилиндр 16 и фиксатор 15,накатываясь на кожух 14 нижнего напорного гидроцилиндра 4, закрепляет напорно-частотно-ударный механизм, а вместе с ним и рабочий орган в новом положении. Тут же включают ход экскаватора и весь цикл работы вновь повторяется. Разрушенная горная масса из за боя выдается при помовди погрузочнотранспортного устройства 30, которое в соответствии с пространственным положением рабочего органа (вернее его нижнего конца) перемещается вдол и поперек плоскости забоя.
Формула изобретения Экскаватор, включающий напорноколебательный механизм, подвижную
платформу и рабочий орган, отличающийся тем, что, с -целью повышения производительности экскаватора, рабочий орган и напорно-колебательный механизм установлены на подвижной платформе г возможностью поворота относительно вертикальной линии, лежащей в плоскости напорноколебательного механизма, который выполнен частотно-ударным.
Источники информации, принятые во внимание при экспертизе
