1
Изобретение относится к области устройств, конструктивно сопряженных с конвейерами и предназначенных для манипулирования изделиями, а именно для отделения изделий типа ящиков от общего потока и подачи их к обрабатывающим мащинам, Например автоматам для укладки или извлечения бутылок из ящиков, применяемым в линиях фасовки и упаковывания пищевых жидкостей, а также других продуктов.
Известно устройство для отделения ящиков от общего потока, содержащее приемный транспортер, бесконечную цепную .передачу с упорами для ящиков, расположенными по щагу, мепьщему длины ящика, установленную на двух вертикальных осях сбоку от приемного транспортера, и механизм подачи ящиков под исполнительные органы обрабатывающей мащины, включающий щаговый транспортер, с поперечными планками и транспортер, имеющий скорость, большую скорости шагового транспортера, с приводом 1.
Благодаря наличию цепной передачи с упорами ящики, двигаясь по приемному транспортеру, приобретают определенный интервал, необходимый для надежного захвата ящиков шаговым транспортером и пода.чи их под обрабатывающие органы машины.
Таким образом, устройство исключает возможность отклонения ящика от номинального положения во время его перемещения по транспортерам устройства.
Однако это устройство из-за л есткой кинематической связи между его элементами может осуществлять только непрерывное
транспортирование ящиков с приобретенным интервалом и скоростью. Поэтому оно не может быть использовано для подачи ящиков к машинам, ра,ботающим с циклическими остановками для обработки ящиков, например автоматам для укладки или извлечения бутылок из ящиков.
Целью изобретения является повыщение надежности работы устройства путем более точной остановки ящиков на шаговом транспортере.
Эта цель достигается за счет того, что на одной вертикальной оси цени закреплен кулачок с датчиком, а на другой оси - храповое колесо с подпружиненным фиксаторо.м,
который соединен с поперечными Планками шагового транспортера, при этом бесконечная цепь смонтирована с возможностью перемещения от ящиков.
Кроме того, чтобы исключить циклическую остановку элементов кинематической
схемы устройства при остановке шагового транспортера, на ведущем валу шагового транспортера установлена фрикционная муфта, а под шаговым транспортером укреплен силовой цилиндр, шток которого снабжен пальцем, .воздействующим на поперечные планки шагового транспортера, причем силовой цилиндр соединен с указанным датчиком.
Для повышения надежности работы устройства путем контроля положения ящика на входе «а шаговый транспортер пневмоцилиндр соединен с датчиком через блокировочный датчик.
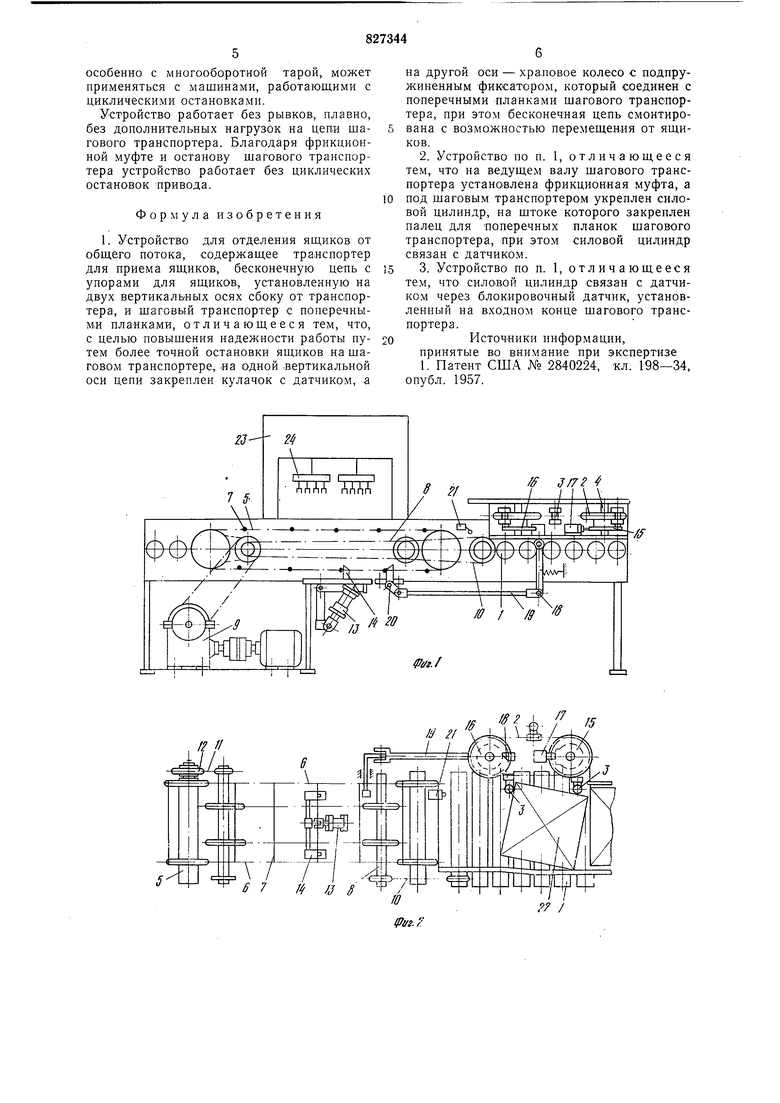
На фиг. 1 изооражен общий вид устройства, вид спереди; на фиг. 2-то же, щ плане.
Устройство имеет приемный транспортер 1, бесконечную цепную передачу 2 с упорами 3, установленную на вертикальных осях
4сбоку от приемного транспортера 1, шаговый транспортер 5, имеющий две параллельные цепи о, соединенные между сооой через определенйые интервалы упорными плавками 7, и трайспортер 8, расположеняы,й между ветвями шагового транспортера
5и имеющий скорость выше скорости шагового транспортера 5.
Транспортер и приводится в движение приводом и связан с приемным и шаговым транспортером 5 цепными передачами 10 и И, причем с шаговым транспортером связан через фрикционную муфту 12.
Под шаговым транспортером 5 укреплен пневмоцилиндр 13, шток которого снабжен пальцем 14.
На осях 4 цепной передачи 2 закреплены «улачок 15 и храповое колесо 16. Кулачок 1о воздействует на датчик 17 |Привода 9. Храповое колесо 16 находится в зацеплении с подпружиненньш фиксатором 18, соединенным тягой 19 с рычагом 20.
Датчик 17 соединен с пневмоцилиндром 13 через блокировочный датчик 21, установленный в зоне входа ящика 22 на шаговый транспортер 5.
Устройство присоединяется к обрабатывающей мащине 23 с .исполнительными органами 24 вдоль оси шагового транспортера 5.
Устройство работает следующим образом.
Ящики, двигаясь по приемному транспортеру 1, поочередно захватывают передней стенкой упор 3 цепной передачи 2, находящийся в зоне движения ящика, и новорачивают ее. В результате поворота цепи следующий упор 3 |Входит в зону движения ящика и смещает заднюю часть движущегося ящика относительно передней стенки наследующего ящика.
Поочередно отделяясь таким образом от общего потока, ящики поступают в зону действия шагового транспортера 5, подхватываются транспортером 8, прижимаются к
упорным планкам 7 шагового транспортера о и вместе с ними перемещаются разделенные по шагу.
Установка ящиков под рабочими органами 24 оорабатывающеи мащины 23 осуществляется пальцем 14, который вводится пневмоцилиндром 13 в зону движения упорных планок 7 и останавливает их, ооеспечивая за счет пробуксовки муфты 12 необходимый выстой ящиков.
Остановка потока ящиков на приемном транспортере 1 осуществляется за счет зацепления храпового колеса 16 с фиксатором 1й, тем самым цепная передача 2 лишается возможности .проворачиваться и упор 3, оставаясь неподвижным, удерживает поток ящиков на входе. При это.м датчик Г/ оудет нажат кулачком ID.
Команда на сраоатывание устройства поступает на датчик 1/ от оорабатывающеи машины после завершения операции, пели на приемном транспортере 1 имеются ящики, цепная передача z находится в состоянии, при котором датчик 1 / нажат кулачком 1JD, и команда от датчика Г/ поступает на блокировочный датчик lil, и если ящик в зоне действия шагового транспортера будет занимать положе шое место, датчик 21 пропускает команду на нневмоцилиндр 13.
11невмоцилиндр 13, при соблюдении указанных выше условии, выведет 1алец Н из зацепления с планкой 7 и шаговый транспортер D начинает -перемещение ящиков на новые позиции. Одновременно иланка 7, начав движение, воздействует на рычаг 2U, выводя из зацепления с храповым колесом 1Ь фиксатор 1ь, дает возможность очередному ящику, находящемуся на приемном транспортере 1, войти в освободившуюся
зону действия шагового транспортера 5. Начав движение, ящик на ирие.мном транспортере 1 поворачивает цепную передачу 2, и кулачок 15 освооождает датчик Г/, давая команду пневмоцилиндру 13 на ввод пальца И для остановки шагового транспортера 5.
Таким образом, прямая связь (цепная передача 2 - кулачок 15-датчики 17 и 21 - аневмоцилиндр 13-упорная планка 7) и
ооратная (упорная иланка / - рычаг 20- фиксатор Id-храповое колесо 16-цепная передача 2) обеспечивают надежное взаимно увязанное срабатывание элементов устройства с учетом тем:па подачи яшиков.
Причем устройство может быть исполнено для работы с машинами, имеющими одну, две, три и более позиций одновременной обработки ящиков, т. е. выстой на устройстве ящиков можно получить после подачи их на одну, две, три и более позиций. Устройство работает в зависимости от наличия ящиков, характера и темпа их подачи и движения на транспортерах устройства, реагирует на изменение этих условий
и, таким образом, более надежно в работе

| название | год | авторы | номер документа |
|---|---|---|---|
| Машина для изготовления складных детских книжек-ширм | 1958 |
|
SU120498A1 |
| Устройство для нанесения клея на кромки обувных деталей из мягких материалов | 1990 |
|
SU1784202A1 |
| МАШИНА ДЛЯ КОНТРОЛЯ ГЕРМЕТИЧНОСТИ ТАРЫ | 1969 |
|
SU244677A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| Автомат к лесопосадочной машине для подачи сеянцев | 1988 |
|
SU1613024A2 |
| АВТОМАТ ДЛЯ УКЛАДКИ ЦИЛИНДРИЧЕСКИХ ПРЕДМЕТОВВ ЯЩИКИ | 1965 |
|
SU175870A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ДРОТОМ ПАТРОНОВ СТЕКЛОФОРМУЮЩЕЙ МАШИНЫ | 1970 |
|
SU269440A1 |
| Механизм шагового перемещения | 1983 |
|
SU1084197A1 |
| Автомат для сборки изделий типа цепного транспортера | 1973 |
|
SU518316A1 |
| Листопередающее устройство | 1978 |
|
SU766896A1 |
