1
Изобретение относится к горнодобывающей промышленности и может быть использовано для подъемников с канатоведущим органом трения.
Известен способ предотвращения проскалЪзывания каната шахтного подъемника, согласно которому устанавливают контрольные шкивы трения, взаимодействующие с ветвями каната, измеряют угловую скорость одного из контрольных шкивов трения для определения наличия проскальзывания каната и изменяют силу сцепления каната с футеровкой головного шкива 1.
Недостатком известного способа является низкая эффективность, обусловленная тем, что определяют явление проскальзывания уже после того, как оно началось на подъемной машине.
Цель изобретения - повышение эффективности путем упрежденного выявления влияющих на проскальзывание каната условий.
Эта цель достигается тем, что измеряют натяжения ветвей каната и их разность, притормаживают один из контрольных шкивов трения усилием, пропорциональным разности натяжения ветвей каната, измеряют угловую скорость второго контрольного шкива трения и определяют момент проскальзывания каната относительно приторможенного шкива, который регистрируют по рассогласованию угловых скоростей шкивов трения.
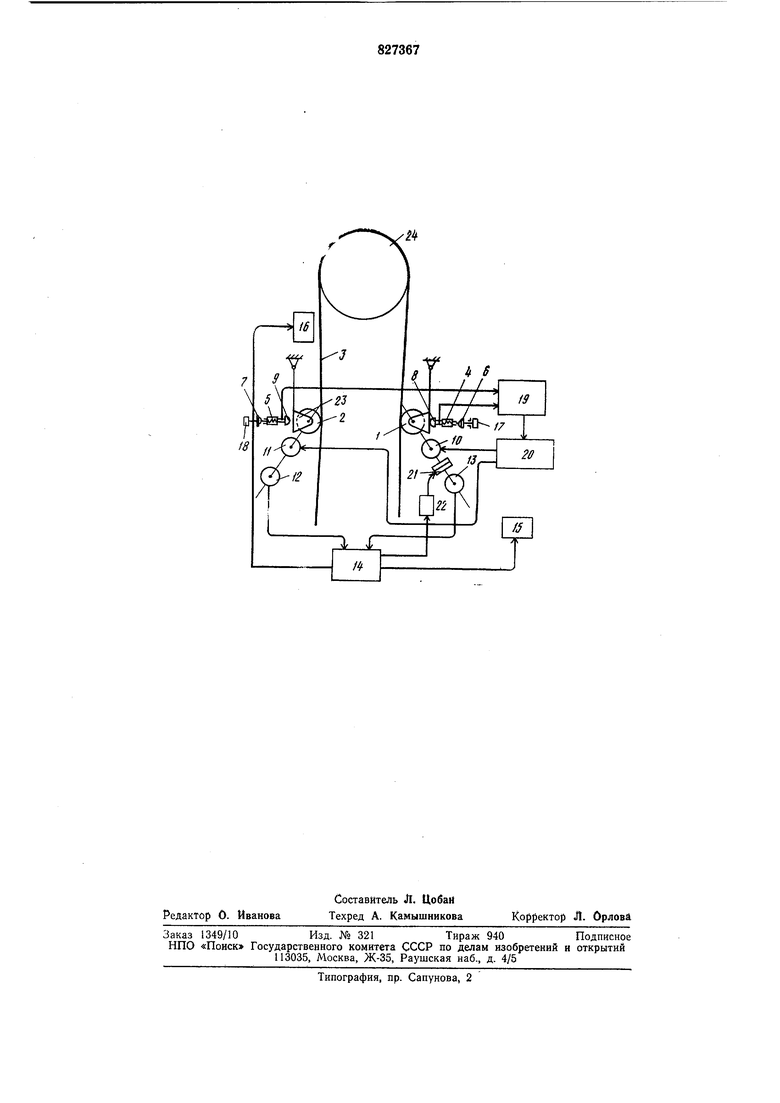
На чертеже изображена схема устройства, реализующего способ предотвращения проскальзывания каната шахтного подъемника.
Способ заключается в том, что на подъемную машину устанавливают модель, состоящую из двух контрольных шкивов 1, 2 трения, прижимаемых к ветвям каната 3 прижимными узлами, состоящими, например, из пружин 4, 5 с регулировочными элементами 6, 7 с датчиками 8 и 9 для определения натяжения ветвей каната. Шкивы трения находятся на одной оси с тормозными устройствами 10, 11 модели и устройством для определения синхронности вращения одного контрольного шкива трения модели относительно другого, состоящим, например, из сельсин-датчика 12 и сельсинприемника 13, соединенных с блоком 14 определения проскальзывания. К вращаюЩимся шкивам трения тормозными устройствами модели-прикладываются усилия, пропорциональные разности натяжений ветвей головного каната. Выходы блока 14 соединены с блоком 15 корректировки тормозной системы подъемной машины и с блоком 16 управления механизмом повышения тяговой способности. Для исключения влияния колебаний ветвей каната на работу устройства прижимные узлы снабжены демпфирующими элементами 17, 18. Датчики 8, 9 соединены со входами блока 19 совпадения, соединенного с блоком 20 управления тормозными устройствами 10, 11 модели. Между тормозным устройством 10 исельсин-приемником 13 имеется электромагнитная муфта 21, связанная через усилитель 22 с выходом блока 14. Контрольные шкивы 1, 2 установлены на шарнирных подвесках 23. Ветви 3 Каната огибают шкив 24 трения, связанный с колодочным тормозом (не показан) подъемной машины. Тормозное усилие, прикладываемое к контрольным шкивам трения, выбирается так, чтобы было выполнено следующее соотношениеР - KF торМ - нат.мм .пм -сила сцепления ветвей каната с футеровкой шкива трения; нат.пм- разность натяжений ветвей каната;сц. м - сила сцепления ветвей каната со шкивом модели; тор. м - тормозное усилие, пропорциональное разности натяжения ветвей каната; /( - коэффициент пропорциональности, при выборе которого удовлетворяется указанное выще соотношение. Проскальзывание каната наступает при Второе из этих отношений становится меньше единицы раньше, чем первое, при изменении условий на подъемной машине в сторону приближения проскальзывания. Следовательно, контрольный шкив модели проскользнет относительно каната подъемной машины раньше, чем проскальзывание наступит на подъемной машине. Коэффициент К, от которого зависит момент наступления проскальзывания на модели, выбирается из условия необходимого быстродействия устройства. Изменяя коэффициент /С можно получить проскальзывание контрольного шкива модели при режиме работы подъемной машины с заданным заранее коэффициентом безопасности против скольжения, большим коэффициента, установленного Правилами безопасности. Таким образом, при нарастаНИИ динамических условий в ветвях каната или при снижении коэффициента трения трущихся поверхностей канатов проскальзывание наступит раньше на модели, чем на подъемной машине. Проскальзывание притормаживаемого контрольного, шкива трения модели регистрируют при нарушении синхронности вращения контрольных шкивов трения модели, имеющих одинаковую угловую скорость. При проскальзывании одного из контрольных шкивов трения модели в блок 14 определения проскальзывания подается импульс от устройства для определения синхронности вращения. Блок 14 определения проскальзывания вырабатывает сигнал на корректировку работы системы управления подъемной машины с помощью блока 15, а также на включение через блок 16 устройства для регулирования тяговой способности шахтной подъемной машины с целью предотврашения возможности возникновения на ней явления проскальзывания. Способ позволяет определить момент наступления проскальзывания на модели до наступления его на подъемной машине, он является более совершенным по сравнению со способом для определения наступившего проскальзывания, так как прогнозирование возможности возникновения проскальзывания канатов подъемной машины позволяет дать сигнал на корректировку системы управления машиной с целью создания условий, не допускающих проскальзывания канатов на машине. Формула изобретения Способ предотвращения проскальзывания каната шахтного подъемника, согласно которому устанавливают контрольные шкивы трепия, взаимодействующие с ветвями каната, измеряют угловую скорость одного из контрольных шкивов трения для определения наличия проскальзывания каната и изменяют силу сцепления каната с футеровкой головного шкива, отличающийся тем, что, с целью повыщения эффективности путем упрежденного выявления влияющих на проскальзывание каната условий, измеряют натяжения ветвей каната и их разность, притормаживают один из контрольных шкивов трения усилием, пропорциональным разности натяжений ветвей каната, измеряют угловую скорость второго контрольного шкива трения и определяют момент проскальзывания каната относительно приторможенного шкива, который регистрируют по рассогласованию угловых скоростей контрольных шкивов трения. Источники информации, принятые во внимание- при экспертизе 1. Авторское свидетельство СССР № 245304, кл. В 66В 19/06, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА] ТРЕНИЯ КАНАТОВФШШ SSEKPli | 1972 |
|
SU432369A1 |
| Устройство для предотвращения проскаль-зыВАНия KAHATA шАХТНОгО пОд'ЕМНиКА | 1970 |
|
SU827368A1 |
| Способ определения коэффициента трения между канатом и футеровкой шкива многоканатного фрикционного подъемника | 1985 |
|
SU1376009A1 |
| Способ регулирования процесса предохранительного торможения шахтной подъемной машины | 1983 |
|
SU1146269A1 |
| Способ определения коэффициента трения (сцепления) пары канат-футеровка приводного шкива многоканатной подъемной установки | 1988 |
|
SU1589150A1 |
| Устройство регулирования процесса предохранительного торможения шахтной многоканатной подъемной машины | 1986 |
|
SU1442493A1 |
| Способ управления многоканатной подъемной установкой с приводным и отклоняющим шкивами | 1983 |
|
SU1197973A1 |
| Способ контроля натяжения канатов шахтных подъемных установок | 1982 |
|
SU1066929A1 |
| Способ определения коэффициента трения канатов о футеровку приводного шкива фрикционного подъемника | 1988 |
|
SU1569676A1 |
| Способ предохранительного торможения шахтной подъемной установки со шкивами трения | 1977 |
|
SU638529A1 |