роких пределах при обоих числах пар полюсов путем каскадного включения.
Это достигается тем, что электродвигатель снабжен регулируемыми резисторами, одни -выводы которых -соединены в общую точку, другие подключены к группе выводов обмотки статора, не соединенной с источником питания, а разных полюскостей обмотки ротора соединены между собой с взаимно согласным чередованием фаз.
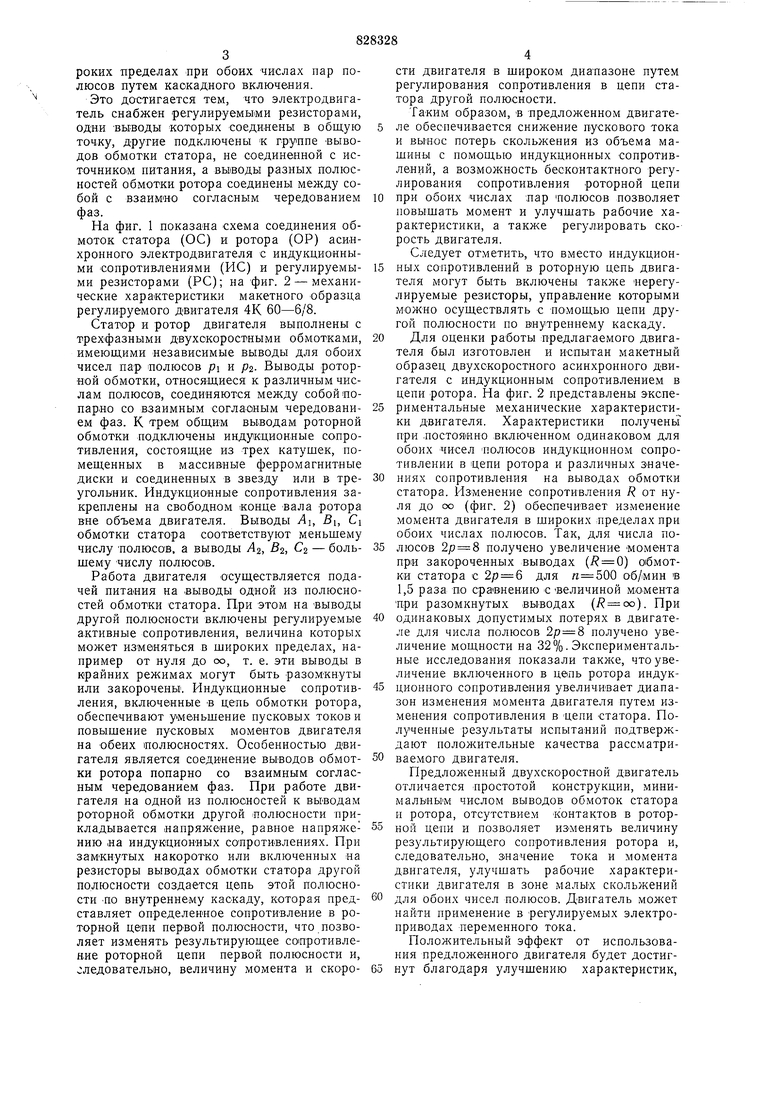
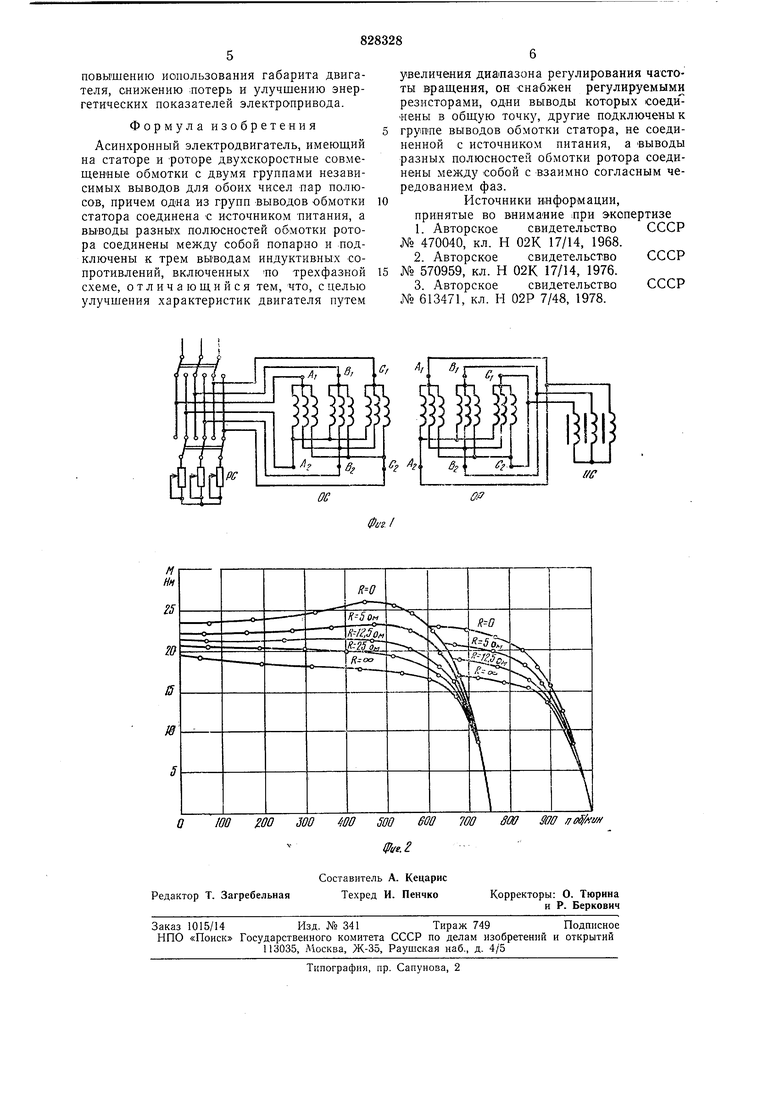
На фиг. 1 показана схема соединения обмоток статора (ОС) и ротора (ОР) асинхронного электродвигателя с индукционными сопротивлениями (ИС) и регулируемыми резисторами (PC); на фиг. 2 - механические характеристики макетного образца регулируемого двигателя 4К 60-6/8.
Статор и ротор двигателя выполнены с трехфазными двухскоростными обмотками, имеющими независимые выводы для обоих чисел пар полюсов pi и ps- Выводы ротор-ной обмотки, относящиеся к различным числам полюсов, соединяются между собой попарно со взаимным согласным чередованием фаз. К трем общи-м выводам роторной обмотки подключены индукционные сопротивления, состоящие из трех катушек, помещенных в массивные ферромагнитные диски и соединенных в звезду или в треугольник. Индукционные сопротивления закреплены на свободном конце -вала ротора вне объема двигателя. Выводы AI, BI, Ci обмотки статора соответствуют меньшему числу полюсо-в, а выводы Лз, 52, 2 - больтему -числу полюсов.
Работа двигателя осуществляется подачей питания на 1выводы одной из полюсностей обмотки статора. При этом на выводы другой полюсности включены регулируемые активные сопротивления, величина которых может изменяться в широких пределах, например от нуля до 00, т. е. эти выводы в крайних режимах могут быть разом-кнуты или закорочены. Индукционные сопротивления, включенные -в цепь обмотки ротора, обеспечивают уменьшение пусковых токов и повышение пусковых моментов двигателя на обеих полюсностях. Особенностью двигателя является соединение выводов обмотки ротора попарно со взаимным согласным чередованием фаз. При работе двигателя на одной из полюсностей к выводам роторной обмотки другой полюсности прикладывается напряжение, равное напряжению на индукционных сопротивлениях. При замкнутых накоротко или включенных на резисторы выводах обмотки статора другой подюсно-сти создается цепь этой полюсности ПО внутреннему каскаду, которая представляет определенное сопротивление в роторной цепи первой полюсности, что позволяет изменять результирующее сопротивление роторной цепи первой полюсности и, следовательно, величину момента и скорости двигателя в широком диапазоне путем регулирования сопротивления в цепи статора другой полюсности.
Та-ким образом, в предложенном двигателе обеспечивается снижение пускового тока и вьгвос потерь скольжения из объема машины с помощью индукционных сопротивлений, а возможность бесконтактного регулирования сопротивления роторной цепи при обоих числах пар полюсов позволяет повышать момент и улучшать рабочие характеристики, а также регулировать скорость двигателя.
Следует отметить, что вместо индукционных со-противлений в роторную цепь двигателя могут быть включены нерегулируемые резисторы, управление которыми можно осуществлять с помощью цепи другой полюсности по внутреннему каскаду.
Для оценки работы п-редлагаемого двигателя был изготовлен и испытан макетный образец двухскоростного асинхронного двигателя с индукционным сопротивлением в цепи ротора. На фиг. 2 представлены экспериментальные механические характеристики двигателя. Характеристики полученьГ п-ри .постоянно включенном одинаковом для обоих -чисел полюсов индукционном сопротивлении в цепи ротора и различных значениях сопротивления на выводах обмотки статора. Изменение сопротивления R от нуля до 00 (фиг. 2) обеспечивает изменение момента двигателя в широких пределах при обоих числах полюсов. Так, для числа полюсо-в 2р 8 получено увеличение -момента при закороченных выводах (/ 0) обмотки статора с для об/мин в 1,5 раза по сравнению с величиной момента при разомкнутых выводах (). При одинаковых допустимых потерях в двигателе для числа полюсов получено увеличение мощности на 32%. Экспериментальные исследования показали также, что увеличение включенного в цепь ротора индукционного сопротивления увеличивает диапазон изменения момента двигате.тя путем изменения сопротивления в -цепи статора. Полученные результаты испытаний подтверждают ноложительные качества рассматриваемого двигателя.
Предложенный двухскоростной двигатель отличается простотой конструкции, минимальным числом выводов обмоток статора и ротора, отсутствием контактов в роторной це-пи и позволяет изменять величину результирующего сопротивления ротора и, следовательно, значение тока и момента двигателя, улучшать рабочие характеристики двигателя в зоне малы-х скольжений для обоих чисел полюсов. Двигатель может найти применение в -регулируемых электроприводах переменного тока.
Положительный эффект от использования предложенного двигателя будет достигнут благодаря улучшению характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротор двухскоростного асинхронного электродвигателя | 1980 |
|
SU904122A1 |
| Ротор с индукционным сопротивлением для двухскоростного асинхронного двигателя | 1981 |
|
SU964877A1 |
| Ротор трехфазного трехскоростного асинхронного электродвигателя | 1978 |
|
SU748692A1 |
| Ротор трехфазного многоскоростного асинхронного электродвигателя | 1979 |
|
SU782060A1 |
| Ротор с индукционным сопротивлением для многоскоростного асинхронного двигателя | 1982 |
|
SU1026247A1 |
| Многофазная обмотка ротора двухскоростного асинхронного двигателя (ее варианты) | 1982 |
|
SU1101979A1 |
| Обмотка ротора двухскоростного асинхронного двигателя | 1978 |
|
SU782047A1 |
| Ротор двухскоростного асинхронного двигателя | 1974 |
|
SU564689A1 |
| Ротор трехфазного двухскоростного асинхронного электродвигателя | 1975 |
|
SU570959A1 |
| Способ регулирования скорости вращения электрической машины двойного питания | 1978 |
|
SU758455A1 |
