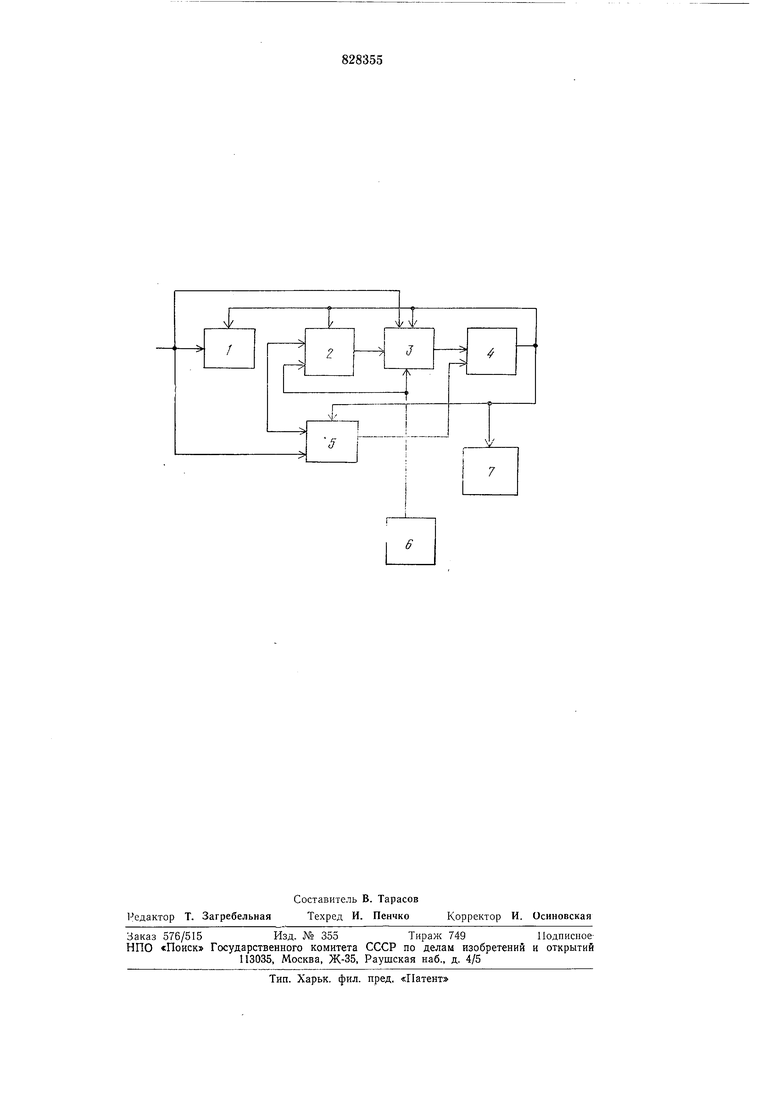
ключей к выходу вычислительного блока, входы которого подключены к входу и выходу генератора частоты скольжения, а выход компаратора подключен к входу блока управления инвертором и к соответствующим -входам генератора частоты скольжения, блока интеграторов, вычислительного блока и дискретного сумматора частот. На чертеже представлена функциональная схема устройства для формирования абсолютного скольжения аоинхроиного двигателя в частотно-регулируемом электроприводе. Устройство содержит генератор / частоты скольжения, дискретный сумматор 2 -шстот, блок 3 интеграторов, компаратор 4, аналогоцифровой вычислительный блок 5, дискретный датчик 6 скорости и блок 7 управлершя инвертором. Устройство формирования абсолютного скольжения работает следующим образом. Сигнал Uy, определяющий требуемую величи,ну абсолютного скольжения, подают иа вход генератора J частоты скольжения, где он нреобразуется в последовательность импульсов, частота которой /,,,, ,R,.,,,,Uy, где Z - разрешающая способность дискретного датчика скоростиб ц/ц ; ДОз- требуемая величина абсолютного скольже- 35 ния; /С,..ч.с- коэффициент передачи генератора / частоты скольжения. Имиульсный сигнал с выхода генерато.ра частоты скольжения так же, как и сигнал с выхода дискретного датчика 6 ско- 40 рости, подается на вход дискретного сумматора 2 частот, где частоты этпх сигналов сум,ми1руются или вычитаются в зависимости от требуемого знака скольжения, оиределяемого знаком си-гнала Ну. Часто- 45 та 1И1Мпульсов на выходе дискретного датчика скорости равна .,(2) - где Q - скорость вращения двигателя. Частота выходного сигнала дискретного сумматора частоты /д.д.с +/1-.Ч-С 3/7,„ /л.с.ч ( ± Д), () число пар полюсов маши1НЫ; бркоэффициент деления частоты в дискретном сумматоре частоты. Коэффициент деления К, можно предить в виде К 1±т,(4) де / - число ИМ1пульсов, приходящих в течение одного межкоммутациояного интервала инвертора;т - число «.мпульсов генератора скольжения, при этом знак « + соответствует двигательному режиму, а «- генераторному режиму работы двигателя. ри этом длительность мел коммутанного интервала в общем случае равна / , мк.и - fт f 1 д д. с/ г.ч.с де Б - охносителвное время коррекции межком.мутационного интервала инвертора. актическое значение абсолютного ьжения на данном межкоммутационинтервале определяется 1как Д2 9„-2: з-- :V 1 Pi3 условия до ДЙз можно найти общее выражение для относительного времени коррекции межкоммутационоого интервала инвертора, которое для двигательного режима работы 1™еет вид &(т + Д) К-т- где Д Гмк.нД-.ч.с-пг - дробная часть отношеиия длительности межкоммутационного интервала инвертора и периода частоты генератора частоты скольжения. Р 6 0, как следует из выражения (6), в общем случае ДО t ДОз, а условие (7) выполняется лишь при таких значениях скорости вращения, при которых в Межкоммутационном интервале инвертора укладывается целое число периодов частоты генератора частоты скольжения. Таким образом, при отсутствии коррекции мгновенные значения скольжения на различных межкоммутационных интервалах получаются различными, что снижает качество работы привода. В предлагаемом устройстве сигнал коррекции вырабатывается в соответствии с
выражением (8) в аналого-цифровом вычислительном блоке 5, tia входы которого поступают сигналы с входа п выхода генератора частоты скольжения.
Для определения момента окончания текущего межкоммутаи;ионного интервала (момента очередной коммутации вентилей инвертора) необходимо выработать а«алоговый сигнал, Пропорциональный относительному времени /г.ч.с Для этого служит блок 3 интеграторов, на входы которого поступают сигналы с выхода дискретного датчика 6 скорости, дискретного сумматора 2 частоты. Интеграторы блока 3 запускаются имлульсами дискретного датчика скорости при апределенном состоянии дискретного сумматора частот.
Выходные сигналы вычислительного блока 5 (сигнал коррекции) .и блока 3 интеграторов (сигнал, пропорциональный текущему отнооительному времени) поступают на входы комларатора 4, который фиксирует момент равенства этих сигналов и вырабатывает сигнал, подаваемый на вход блока 7 управления инвертором и обеспечивающий очередную коммутацию вентилей инвертора. Блок 7 управлеиия инвертором содержит в рассматриваемом случае пересчетное устройство и формирователи управляющих им1пульсов.
Работа устройства формирования скольжения повторяется на «аждом межкоммутационном интервале. Возврат всех элементов в исходное состояние обеспечивается выходным сигналом компаратора, подаваемым на соответствующие входы генератора 1 частоты скольжения, дискретного сумматора 2 частоты, блока 3 интеграторов и вычислительного блока 5.
Описанное устройство для формирования абсолютного скольжения позволяет практически устранить неравномерность частоты переключений вентилей и, следовательно, повысить плавность регулирования скорости вращения электропривода.
Формула изобретения
Устройство для формирования абсолютного скольжения асинхронного двигателя в частотно-регулируемом электроприводе с блоком управления инвертором, содержащее дискретный датчик скорости, генератор частоты скольжения и дискретный сумматор частот, входы которого подключены к генератору частоты скольжения и к дискретному датчику скорости, отличающееся тем, что, с целью повыщения плавности рбгулирова1Н1Ия скорости вращения, в «его введены вычислительный блок, компаратор и блок интеграторов, первый вход которого подключен к выходу дискретного сумматора частот, второй вход - к выходу дискретного датч1ика скорости, третий вход - к входу генератора частоты скольжения, а выход - к первому входу компаратора, второй вход которого подключен к выходу вычислительного блока, входы которого подключены к входу и выходу генератора частоты скольжения, выход компаратора подключен к входу блока управления инвертором п к соответствующим входам генератора частоты скольжения блока интеграторов, вычислительного блока и дискретного сумматора частот.
Источники информации, принятые во внимание при экспертизе:
1.Патент ФРГ № 1463344, кл. Н 02 Р 7/42, 1972.
2.Сандлер А. С. и др. Реверсивный тиристорный асинхронный электропривод с цифроаналоговым управлением.- Труды МЭИ. «Автоматизированный электропривод, вып. 325, М., 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования скольжения асинхронного двигателя в частотно-регулируемом электроприводе | 1980 |
|
SU866682A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем | 1981 |
|
SU989732A1 |
| Устройство для частотного управления асинхронным электроприводом | 1980 |
|
SU907751A1 |
| Устройство для управления преобразователем частоты с непосредственной связью | 1976 |
|
SU592003A1 |
| Устройство для управления трехфазным регулируемым инвертором | 1988 |
|
SU1534700A1 |
| Устройство для управления вентильным преобразователем | 1985 |
|
SU1277319A1 |
| Асинхронное устройство для управления вентильным преобразователем | 1981 |
|
SU964958A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |