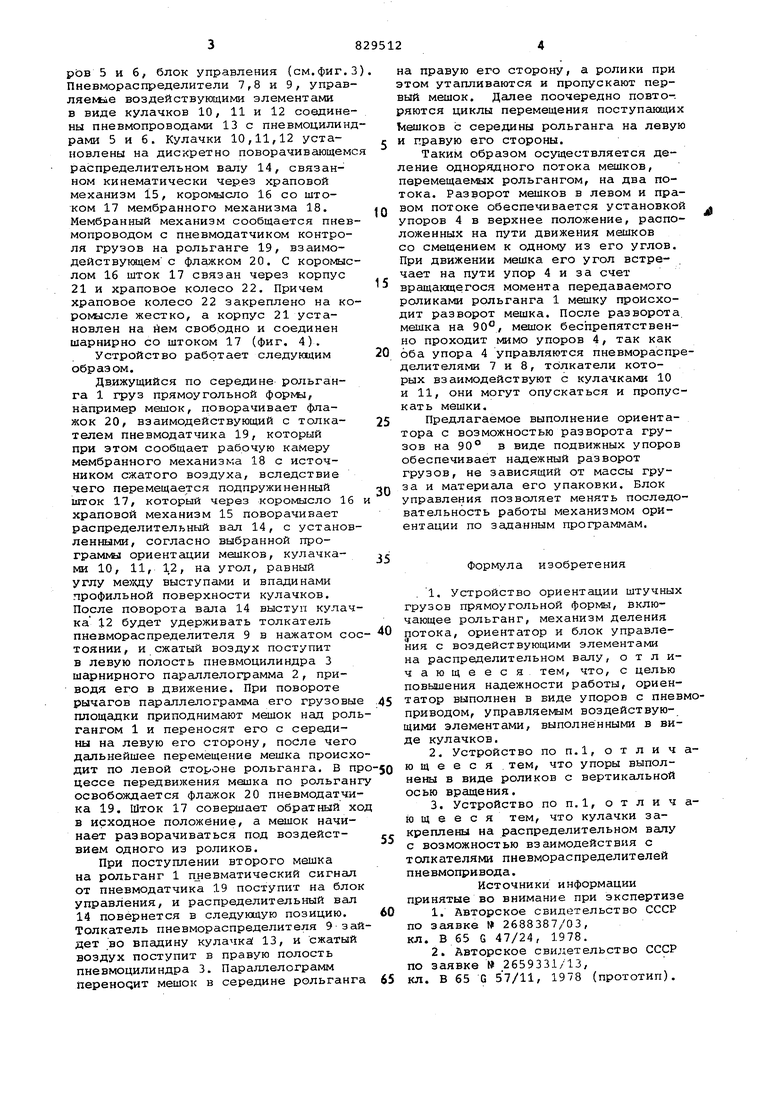
. Изобретение относится к средствам механизации работ со штучными грузами, а именно упаковочно-фасовочной технике, и может быть использовано, например, для формирования слоевярусов из грузов перед укладкой их в пакеты с перевязкой в каждом слое. Известно устройство для ориентации грузов прямоугольной формы, вклю чающее расположенные с двух сторон полотна конвейера упоры 1. Однако устройство не позволяет ориентировать мешки с одновременным разворотом их на 90°. Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройствоориентации штучных грузов прямоуголь ной формы, включающее рольганг, меха низм деления однорядного потока штуч ных грузов, ориентатор, в виде полотен транспортера с различными скорое тями, и блок, управления механизмом деления с воздеиствугацими элементами диска, расположенного на распределительном валу 2. Однако и данное устройство не надежно при изменении программы ориентации в процессе работы и при развороте грузов на 90 в процессе ориентации. Цель изобретения - повышение надежности работы. Указанная цель достигается тем, что ориентатор выполнен в виде упоров с пневмоприводом, управляег ым воз деист вуиндими элементами, выполненными -в виде кулачков, а также тем, что упоры выполнены в виде роликов с вертикешьной осью вращения, кулачки закреплены на распределительном валу с возможностью гзаимодействия с толкателями пневмораспределителей пневмопривода, На фиг. 1 схематично изображено предлагаемое устройство ориентации штучных грузов прямоугольной форкы; на фиг, 2 - то же, вид сверху, на фиг, 3 - пкев.мосхема управления; на фиг,4 - узел I на фиг. 3. Устройство включает рольганг 1, механизм деления потока, выполненный в виде шарнирного параллелограмма 2, приводимого в действие пневмоцилиндром 3, ориентатор, выполненный в виде подвижных упоров 4, представляющих собой врашаюшие ролики, смонтироваиные на штоках пневмоцнлиндpbB 5 И б, блок управления (см.фиг. Пневмораспределители 7,8 и 9, управ ляемме воздействующими элементами в виде кулачков 10, 11 и 12 соедине ны пневмопроводами 13 с пневмоцилин рами 5 и 6. Кулачки 10,11,12 установлены на дискретно поворачивающем распределительном валу 14, связанном кинематически через храповой механизм 15, коромысло 16 со штоком 17 мембранного механизма 18. Мембранный механизм сообщается пнев мопроводом с пневмодатчиком контроля грузов на рольганге 19, взаимодействукицем с флеркком 20. С коромыс лом 16 шток 17 связан через корпус 21 и храповое колесо 22. Причем храповое колесо 22 закреплено на ко ромысле жестко, а корпус 21 установлен на йем свободно и соединен шарнирно со штоком 17 (фиг. 4). Устройство работает следукхдим образом. Движущийся по середине рольганга 1 груз прямоугольной форьы, например мешок, поворачивает флажок 20, взаимодействующий с толкателем пневмодатчика 19, который при этом сообщает рабочую камеру мембранного механизма 18 с источником сжатого воздуха, вследствие чего перемещается подпружиненный шток 17, который через коромысло 16 храповой механизм 15 поворачивает распределительный вал 14, с установ ленными, согласно выбранной проrpaMjvKJ ориентации мешков, кулачками 10, 11, 12, на угол, равный углу между выступами и впадинами профильной поверхности кулачков. После поворота вала 14 выступ кулач ка 12 будет удерживать толкатель пневмораспределителя 9 в нажатом со тоянии, и сжатый воздух поступит в левую полость пневмоцилиндра 3 шарнирного параллелограмма 2, приводя его в движение. При повороте рычагов параллелограмма его грузовы площадки приподнимают мешок над рол гангом 1 и переносят его с середины на левую его сторону, после чего дальнейшее перемещение мешка происх дит по левой стороне рольганга. В п цессе передвижения мешка по рольган освобождается флажок 20 пневмодатчи ка 19. Шток 17 совершает обратный х в исходное положение, а мешок начинает разворачиваться под воздействием одного из роликов. При поступлении второго мешка на рольганг 1 цневматический сигнал от пневмодатчика 19 поступит на бло управления, и распределительный вал 14 повернется в следующую позицию. Толкатель пневмораспределителя 9 за дет во впадину кулачка 13, и сжатый воздух поступит в правую полость пневмоцилиндра 3. Параллелограмм переводит мешок в середине рольганг на правую его сторону, а ролики при этом утапливаются и пропускают первый мешок. Далее поочередно повто-. ряются циклы перемещения поступающих Тлешков с середины рольганга на левую и правую его стороны. Таким образом осуществляется деление однорядного потока мешков, перемещаемых рольгангом, на два потока. Разворот мешков в левом и правом потоке обеспечивается установкой упоров 4 в верхнее положение, расположенных на пути движения мешков со смещением к одному из его углов. При движении мешка его угол встречает на пути упор 4 и за счет вращающегося момента передаваемого роликами рольганга 1 мешку происходит разворот мешка. После разворота мешка на 90°, мешок беспрепятственно проходит мимо упоров 4, так как оба упора 4 управляются пневмораспределителями 7 и 8, тЬлкатели которых взаимодействуют с кулачками 10 и 11, они могут опускаться и пропускать мешки. Предлагаемое выполнение ориентатора с возможностью разворота грузов на 90° в виде подвижных упоров обеспечивает надежный разворот грузов, не зависящий от массы груза и материала его упаковки. Блок управления позволяет менять последовательность работы механизмом ориентации по заданным программам. Формула изобретения 1.Устройство ориентации штучных грузов прямоугольной формы, включающее рольганг, механизм деления потока, ориентатор и блок управления с воздействующими элементами на распределительном валу, о т л ич ающеес я тем, что, с целью повышения надежности работы, ориентатор выполнен в виде упоров с пневмоприводом, управляемым воздействующими элементами, выполненными в виде кулачков. 2.Устройство по п.1, отличающее с я тем, что упоры выполнены в виде роликов с вертикальной осью вращения. 3.Устройство по П.1, о т л и ч ак щ е е с я тем, что кулачки закреплены на распределительном валу с возможностью взаимодействия с толкателями пневмораспределителей пневмопривода. Источники информации принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке 2688387/03, кл. В 65 G 47/24, 1978. 2.Авторское свидетельство СССР по заявке 2659331/13, кл. В 65 G 57/11, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для расформирования пакета мешков | 1980 |
|
SU943156A1 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА ДЛЯ ГРУЗОВ В МЯГКОЙ ТАРЕ | 1969 |
|
SU414165A1 |
| Устройство для загрузки люлек подвесного конвейера | 1986 |
|
SU1426899A1 |
| Машина для формирования строп-пакетов из штучных грузов | 1980 |
|
SU935412A1 |
| МАШИНА ДЛЯ ПОГРУЗКИ ШТУЧНЫХ ГРУЗОВ В ВАГОНЫ | 1999 |
|
RU2194662C2 |
| Роторное питающее устройство | 1985 |
|
SU1266706A1 |
| Машина для формирования на поддонах пакетов из затаренных в мешки грузов | 1975 |
|
SU557022A1 |
| Устройство для маркировки тканевых мешков | 1990 |
|
SU1775330A1 |
| Устройство для формирования пакета штучных продольных изделий тройником вперевязку | 1987 |
|
SU1615097A1 |


22
