(54) ГИДРОСИСТЕ14А УПРАВЛЕНИЯ МЕХАНИЗИРОВАННО
КРЕПЬЮ
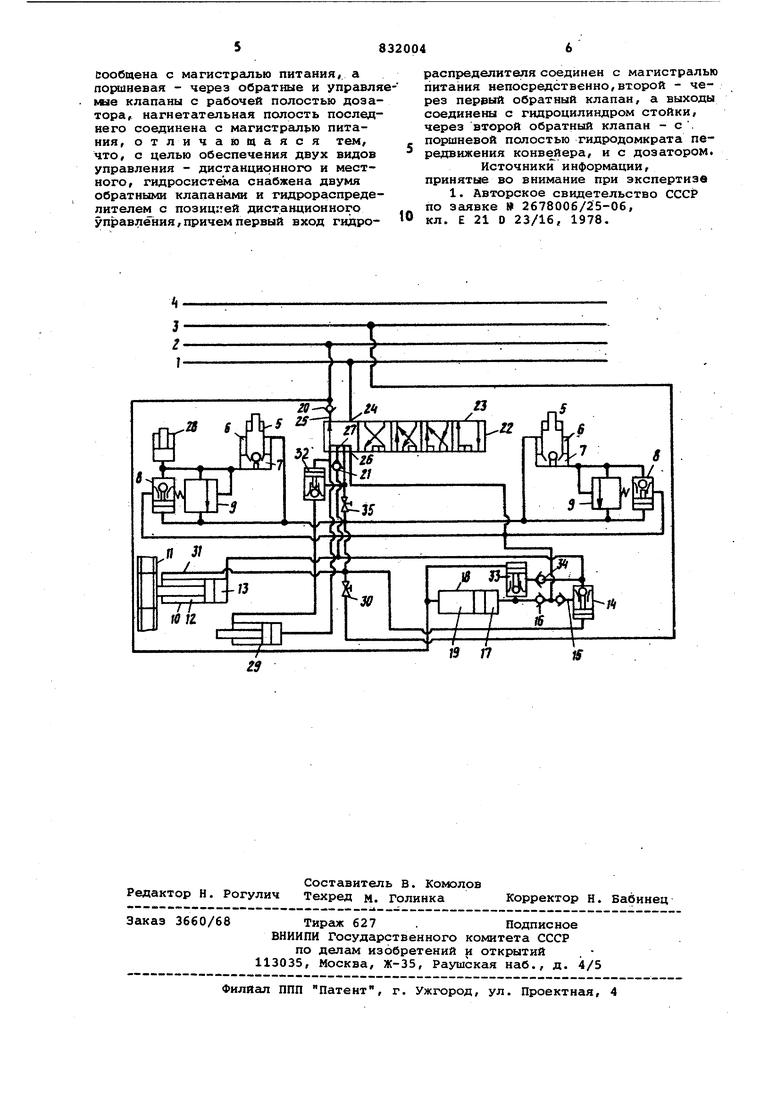
питания. Гидросистема имеет обратные клапаны 20 и 21, гидрораспределитель 22 -с позицией 23 дистанционного управления, причем первый вход 24 гидрораспределителя 22 соединен с магистралью 1 питания непосредственно, второй вход 25 - через обратный клапан 20 с магистрапью 2, выход 26 соединен с гидроцилиндрами 5 стоек, а выход 27 через обратный клапан 21с поршневой полостью 13 гидродомкрата 10 передвижения конвейера 11 и с дозатором 18. Гидросистема имеет также гидродомкрат 28 поджимной консоли верхняка (на чертеже не показано), гидродомкрат 29 выдвижения верхняка (на чертеже не показано). Штоковая полость 12 гидродомкрата 10 передвижения конвейера 11 соединена через запорное устройство 30 и канал 31 с силовой магистралью 3. Гийросистема снабжена также управляемыми клапанами 32, 33, обратным клапаном 34 и вторым запорньпу устройством 35.
Гидросистема управления механизированной крепью работает следукацим образом.
При дистанционном управлении гидч рораспределитель 22 устанавливается в позицию 23 дистанционного управления, запорное устройство 35 закры то, а- запорное устройство 30 открыто
При подаче рабочей жидкости в силовую магистраль 1 рабочая жидкость поступает через гидрораспределитель 22, управляемые клапаны 8 в рабочие полости 7 гидроцилиндров 5 стоек ив гидродомкрат 28 поджимной консоли верхняка, вызывая их раздвижность вследствие чего обеспечивается распо Одновременно рабочая жидкость из силовой магистрали 1 через гидрораспределитель 22, обратный клапан 16 поступает в рабочую полость 17 дозатора 18. При этом происходит подготовка дозатора 18 к обеспечению передвижения забойного комплекса {на чертеже не показан).
Для передвижения забойного комплекса рабочую жидкость подают в силовую магистраль 2, далее в йагнетательн ю полость 19 дозатора 18 и к управляемому клапану 33, который открывается . Выталкиваемая из рабочей полости 17 дозатора 18 рабочая жидKbctb через открытый управляемый клапан 33, обратный клапан 34 поступает в поршневую полость 13 гидродомкрата 10 передвижения конвейера 11, обеспечивая тем самым перемещение последнего.
Для перемещения забойного комп-. лекса к конвейеру 11, рабочую жидкость подают в силовую магистраль 3. При этом рабочая жидкость через запорное устройство 35 поступает в рабочие полости 6 гидроцилиндров 5 стоек и к управляемым клапанам 8, открывая их. Гидроцилиндры 5 стоек опускаются.
Кроме этого, рабочая жидкость поступает в штоковую полость 12 гидродомкрата 10 передвижения конвейера 11 и к управляемому клапану 14, открывая его.. При этом гидродомкрат 10 передвижения -конвейера 11 перемещается, подтягивая секцию крепи.
Для местного управления необходимо закрыть запорное устройство 30 и открыть запорное устройство 35. При этом рабочая жидкость постоянно подается в силовую магистраль 1, а а управление производится гидрораспределитёлем 22. При включении гидрораспределителя 22 рабочая жидкость из силовой магистрали 1 поступает в гидродомкрат 29 вьщвижения верхняка. Одновременно рабочая жидкость открывает управляемый клапан 32. Вытесняемая рабочая жидкость из гидродомкрата 29 выдвижения верхняка через открытый управляемый клапан 32, обратный клапан 20 поступает на слив. Таким образом производится работа гидродомкрата 29 выдвижения верхняка.
При включении гидрораспределителя 22 на передвижение рабочая жидкость из силовой магистрали 1 через гидрораспределитель 22, обратный клапан . 21 поступает в поршневую полосТРь 13 гидродомкрата 10 передвижения конвейера 11. Таким образом происходит передвижение конвейера 11 на забой.
При переключении гидрораспределителя 22 в позицию 23 дистанционного управления производится распор крепи
При этом рабочая жидкость из силовой магистргши 1 через гидрораспределитель 22, управляемые клапаны 8 .поступает в рабочие полости 7 гидрЬцилиндров 5 стоек и в гидродомкрат 28 подвижной консоли верхняка, вызывая их раздвижность.
Одновременно рабочая жидкость через обратный клапан 16 поступает в рабочую полость 17 дозатора 18, подготавливая его к работе.
Далее, переключая гидрораспределитель 22, цикл повторяют.
Предлагаемое изобретение обеспечивает два вида независимого управления - местное и дистанционное, 4to способствует увеличению качества разработки месторождений.
Формула изобретения
Гидросистема управления механизированной крепью,, содержащая гидроцилиндр стойки, рабочие полости которого сообщены с магистралью питания через управляемый и предохранительный клапаны, гидродомкрат пере|1 вижения конвейера, штоковая полость которого сообщена с магистралью питания, а поршневая - через обратные и управля кие клапаны с рабочей полостью дозатора, нагнетательная полость последнего соединена с магистралью питания, отличающаяся тем, что, с целью обеспечения двух видов управления - дистанционного и местного, гидросист а снабжена двумя обратными клапанами и гидрораспределителем с позицией дистанционного управления,причем первый вход гидрораспределителя соединен с магистралью питания непосредственно,второй - через перэый обратный клапан, а выходы соединены с гидроцилиндром стойки, через второй обратный клапан - с . поршневой полостью гидродомкрата передвижения конвейера, и с дозатором Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке 2678006/25-06, кл. Е 21 D 23/16, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема управления механизированнойКРЕпью | 1979 |
|
SU821705A1 |
| Устройство для управления гидравлической крепью | 1974 |
|
SU726345A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СЕКЦИЕЙ МЕХАНИЗИРОВАННОЙ КРЕПИ | 1990 |
|
RU2018686C1 |
| Гидросистема управления механизированной крепью | 1980 |
|
SU949198A1 |
| Секция механизированной шахтной крепи | 1980 |
|
SU939779A1 |
| Гидросистема секции механизированной крепи | 1984 |
|
SU1213212A1 |
| Гидросистема управления механизированной крепью | 1978 |
|
SU730970A1 |
| Устройство для управления секцией гидрофицированной крепи | 1980 |
|
SU1102978A1 |
| АГРЕГАТ СТРУГОДОСТАВОЧНЫЙ, СТАВ СТРУГОДОСТАВОЧНОГО АГРЕГАТА, МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ НАПРАВЛЯЮЩИХ, АГРЕГАТНАЯ КРЕПЬ, ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ, УСТРОЙСТВО ДЛЯ ПОДХВАТА ПРИЗАБОЙНОЙ КРОВЛИ, ОПОРНАЯ БАЗА КОЛЬЦЕВОГО СТРУГА | 2000 |
|
RU2182668C2 |
| Гидросистема управления секцией механизированной крепи | 1987 |
|
SU1509542A1 |
