Изобретение относится к машиностроению, в частности к станкостроению, и может быть использовано для возврата в исходное положение подвижных опор устройства для перемещения узла.
Известно устройство для перемещения рабочих узлов станков, в том,числе тяжелых, в режиме подачи или установочных перемещений на неограничиваемое расстояние с помощью двух поочередно работающих кинематических пар, имеющих вьщвижной стержень ограниченной длины, например винта с гайкой или гид оцилиндра с поршнем и штоком. Каждая кинематическая пара соединена посредством этого вьщвижного Стержня с подвижной опорой, периодически контактирующей с помощью прихвата с неподвижным основанием устройства. Работая поочередно, кинематические пары обеспечивают непрерывное и плавное перемещение подвижного узла на длину, многократно превышающую рабочий ход их выдвижных стержней.
Устройство снабжено также командным узлом, управляющим попеременным включением приводов кинематических п и прихватов подвижных опор, попеременным перегоном подвижньпс опор, а также попеременным перегоном подвшкньк опор в их исходные положения f
Недостатком известного устройства является сложность его конструкц и снижение надежности работы всего привода из-за сложной автоматики.
Целью изобретения являетсй упрощение конструкции устройства и повышение надежности работы.
Эта цель достигается тем, что командный узел выполнен в виде замкнутой, гибкой связн, огибающей блоки, закрепленные на концах подпружиненной центральной тяги, и жестко соединенной своими противоположными ветвями с каждой из подвижных опор причем узел установлен на подвижном узле.
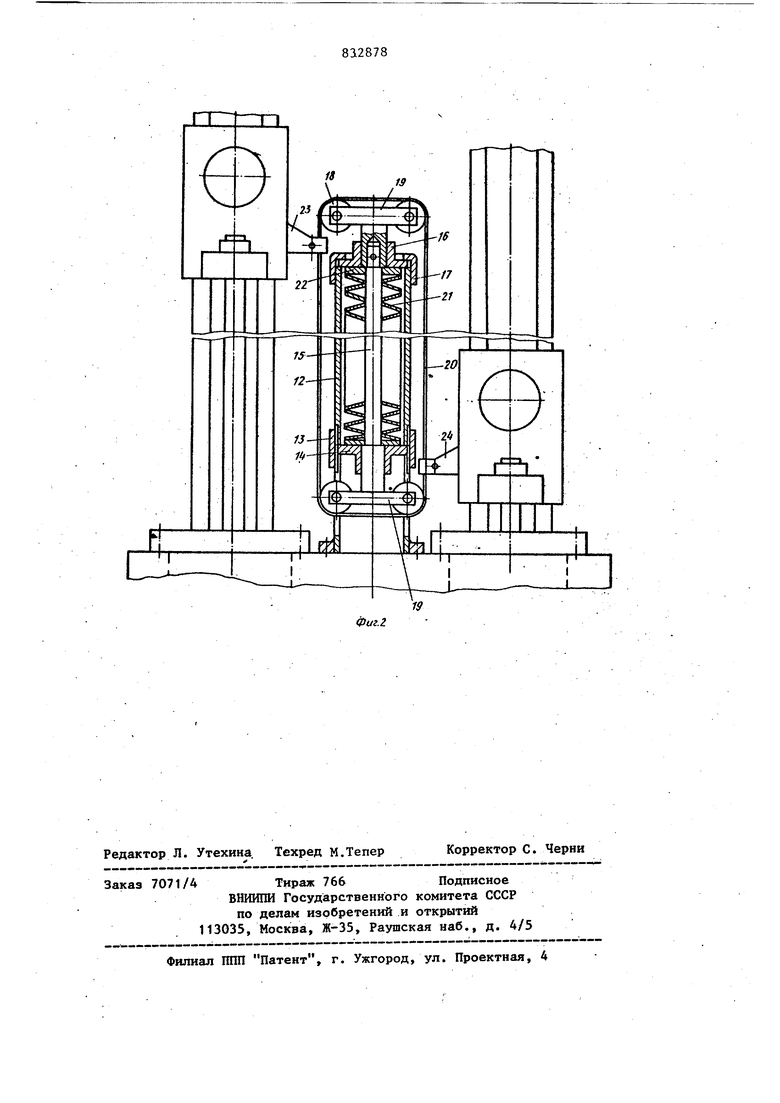
На фиг. 1 изображено устройство общий вид; на фиг. 2 - командный узел, продольный разрез.
На станине 1 установлен подвижный узел (сани) 2, в корпус которого встроеныдве одинаковые кинематические пары 3 и 4 с выдвижными
стержнями, расположенные с одной стороны подвижного узла, параллельно его перемещению. Гидроцилиндры имеют штоки 5 и 6, концы которых постоянно и жестко соединены с корпусами соответствующих продольноподвижных опор 7 и 8, установленных на направляющих 9 и10. Между подвижными опорами расположен командный узел 11, прикрепленный к торцовой вертикальной плоскости узла 2. Каждая из двух ветвей .гибкой связи этого механизма постоянно соединена с соответствующей подвижной опорой. Командный узел 11 содержит составной трубчатый корпус 12, обе части которого соединены резьбовой муфтой 13. С помощью этой муфты между двумя частями корпуса 12 закреплен фланец 14, служащий скользящей опорой для центральной штанги 15. Второй скользящей опорой этой штанги является концевой фланец 16, прикрепленный резьбовой крьш1кой 17. По концам центральной штанги установлены две пары роликов 18, оси которых закреплены в поперечных планках 19. Для прохода поперечной планки в нижней части .трубчатого корпуса выполнена сквозная прорезь, длина которой соответствует перемещению центральной штанги 15. Через ролики проходит замкнутая гибкая связь, выполненная, нап ример, в виде стального канатика 20. На центральную штангу надета пружина сжатия, состоящая из пакета пластинчатых пружин 21. Крайние из них соприкасаются с кольцами 22, каждое из которых упирается в бурт центральной штанги и может скользить по ней. Пакет пластинчатых пружин установлен с предварительным сжатием и для его дополнительной деформации требуется сила, превышающая двойное усилие холостого перемещения вьщвижного стержня кинематической пары, в данном случае штока гидроцилиндра. Подвижные опоры 7 и 8 снабжены зажимами 23 и 24, с помощью которых каждая подвижная опора постоянно соединена со своей ветвью канатика 20.
Устройство работает слёдзпощим образом.. - На основном протяжении действия одного из приводов (кроме крайних небольших отрезков его Хода)
перемещение узла 2 вместе с центральной штангой 15 вызывает перекатывание канатика 20 через ролики, поскольку одна из его ветвей задерживается зажимом 23 или 24 подвижной опоры работающего привода, закрепленной на своей направляющей Вследствие этого свободная подвижная опора передвигается канатиком к своему исходному положению. В соответствии с принципом действия устройства для перемещения подвижного узла необходимая плавность передачи усилия с одного привода на другой достигается путем одновременной работы приводов на протяжении крайних небольших отрезков их хода (порядка 10-20 мм). Таким образом, когда работающий привод не дошел до,своего крайнего положения на эту величину, командный узел 11 включает второй привод и, следовательно, обе ветви канатика оказываются натянутыми одйовременно. Поскольку обе они вместе с центральной щтангой задерживаются зажатыми на станине подвижными опорами, а трубчатьй корпус 12 продолжает перемещаться вместе с санями 2, происходит сжатие пружины.
В тот момент, когда отработавший привод дойдет до своего край328784
него положения, он будет отключен командным узлом устройства, одновременно освобождается его подвижная опора, а поэтому пружина, воз5 вращаясь к своему исходному положению, сдвигает ее на двойную величину своей деформации, после чего опора будет передвигаться в том же направлении за счет перемещения 10 саней. Этот процесс совершается одинаково независимо от направле|Ния перемещения подвижного узла.
Такая конструкция командного узла позвояет устранить привод ускоренного холостого хода подвижных опор, требующий установки электродвигателя на каждой подвижной опоре (йри винтовых кинематических парах), или отдельного источника питания высокой производительности (при гидроцилиндрах). Кроме того, сокращается количество элементов автоматического цикла, поскольку не
25 требуется управление быстрым перегоном подвижных опор в их исходные положения.
Таким образом, устройство для перемещения рабочих узлов станков
30 на неограничиваемое расстояние упрощается, а степень надежности работы его повышается. 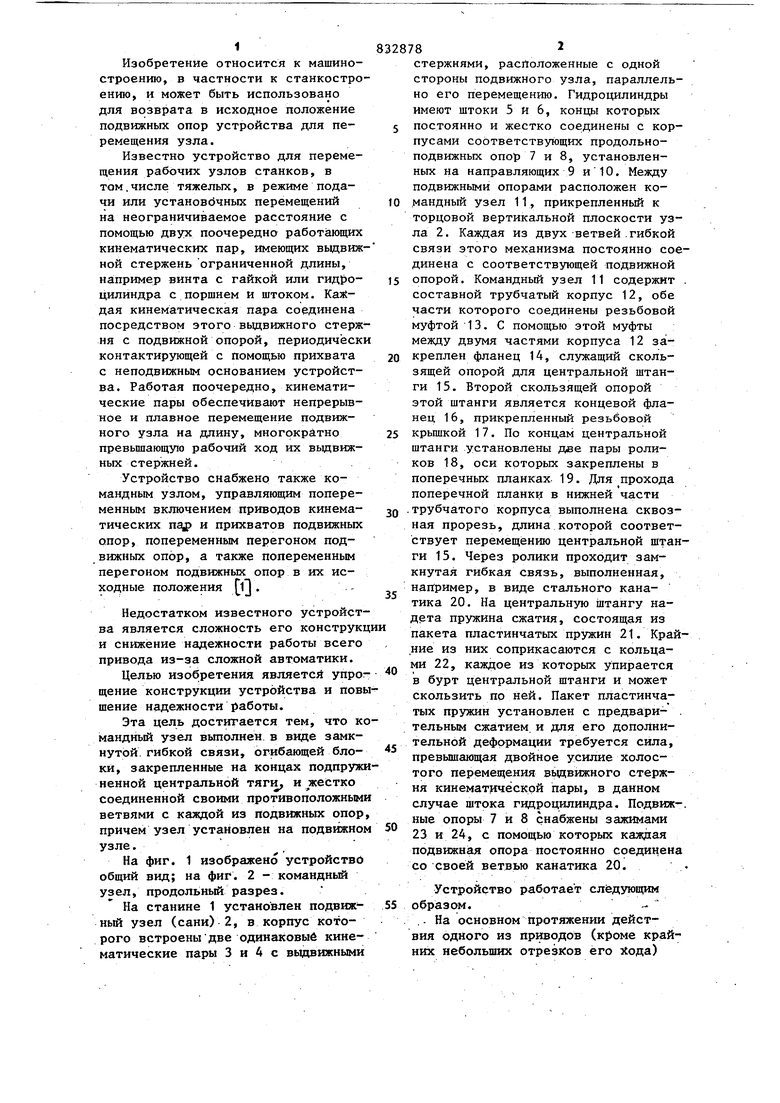
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения подвижного узла | 1976 |
|
SU729029A1 |
| Устройство для перемещения подвижного узла | 1979 |
|
SU832877A2 |
| Электрогидравлический следящий привод | 1977 |
|
SU920267A1 |
| Линия для изготовления и сборки грифов музыкальных инструментов | 1983 |
|
SU1169013A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ПРОСТРАНСТВЕННЫХ ФЕРМ ДВУХКОНСОЛЬНЫХ ДОЖДЕВАЛЬНЫХ АГРЕГАТОВ | 1999 |
|
RU2156058C1 |
| Укладчик элементов тоннельной обделки | 1985 |
|
SU1328530A1 |
| Проволочная моталка | 1982 |
|
SU1140847A1 |
| Автоматическая линия | 1984 |
|
SU1187962A1 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ВИНТОНАБИВНОЙ СВАИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2076173C1 |
УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО УЗЛА по п 1 авт. свид. № 729029, отличающееся тем, что, с целью упрощения конструкции и повьшения надежности работы, командный узел выполнен в виде замкнутой гибкой связи, огибающей блоки, закрепленные на концах подпружиненной центральной тяги, и постоянно соединенной своими противоположными ветвями с каждой из подвижных опор, причем командный узел установлен на подвижном узле.(ЛSс00 Юю00 •^00БJJIL_LJ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ОКРОШКА СБОРНАЯ МЯСНАЯ" | 2007 |
|
RU2342001C1 |
